







旋转向量和平移向量的本质
1. 平移向量的本质
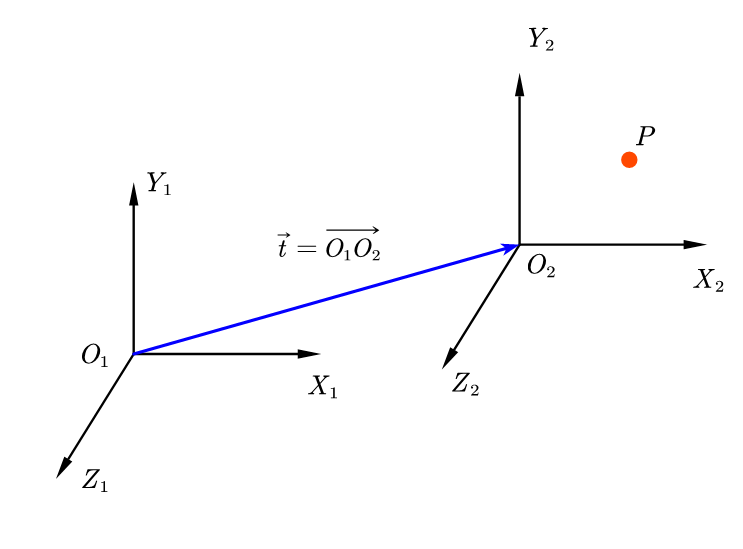
如图所示,坐标系1和坐标系2平行但不重合,所以空间点从坐标系2到坐标系1的变换只有平移,空间的一点 P P P在坐标系2和坐标系1的坐标分别设为 P 2 P_{2} P2和 P 1 P_{1} P1,设平移向量为 t ⃗ \vec{t} t,即,空间点从坐标系2到坐标系1的变换可以表示为: P 1 = P 2 + t ⃗ P_{1}=P_{2}+\vec{t} P1=P2+t
- 本质:空间点从坐标系2变换到坐标系1的平移向量 t ⃗ \vec{t} t为 O 1 O 2 ⃗ \vec{O_{1}O_{2}} O1O2,在坐标系1中该向量的值与 O 2 O_{2} O2在坐标系1中的坐标相等。
2. 旋转矩阵的本质

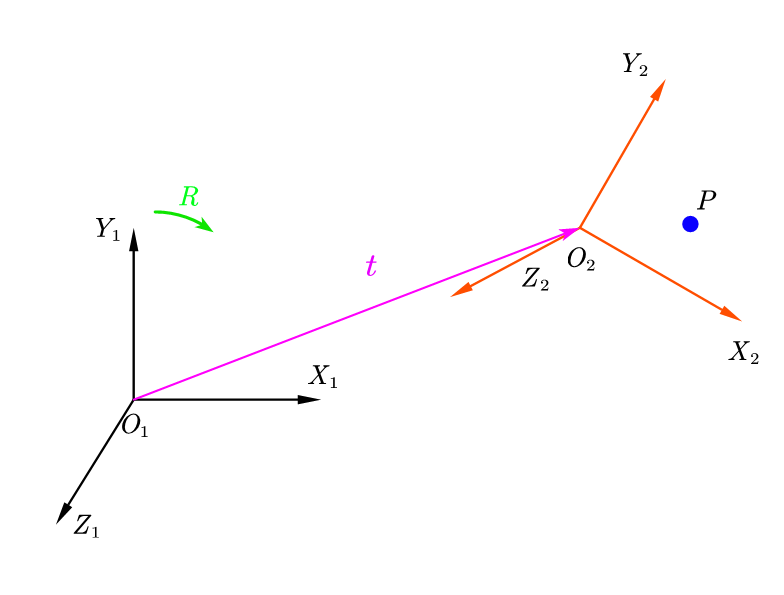
如图所示,坐标系1和坐标系2原点重合但是不平行,所以空间点从坐标系2到坐标系1的变换只有旋转矩阵。空间的一点 P P P在坐标系2和坐标系1的坐标分别设为 P 2 P_{2} P2和 P 1 P_{1} P1,旋转矩阵用 R R R表示则:
P 1 = R P 2 P_{1}=RP_{2} P1=RP2
R = [ r 11 r 12 r 13 r 21 r 22 r 23 r 31 r 32 r 33 ] = [ r 1 r 2 r 3 ] R=\begin{bmatrix} r_{11} & r_{12} & r_{13} \\ r_{21} & r_{22} & r_{23} \\ r_{31} & r_{32} & r_{33} \end{bmatrix}=\begin{bmatrix} r_{1} & r_{2} & r_{3} \end{bmatrix} R=⎣⎡r11r21r31r12r22r32r13r23r33⎦⎤=[r1r2r3]
在坐标系2中取三个特殊点 A ( 1 , 0 , 0 ) , B ( 0 , 1 , 0 ) , C ( 0 , 0 , 1 ) A(1,0,0),B(0,1,0),C(0,0,1) A(1,0,0),B(0,1,0),C(0,0,1),并分别将其转换到坐标系1中,则
{ P A 1 = R P A = r 1 P B 1 = R P B = r 2 P C 1 = R P C = r 3 \left\{\begin{array}{ll} P_{A1}= RP_{A} =r_{1} \\ P_{B1}= RP_{B} =r_{2} \\ P_{C1}= RP_{C} =r_{3}\end{array} \right. ⎩⎨⎧PA1=RPA=r1PB1=RPB=r2PC1=RPC=r3
空间点从坐标系2到坐标系1的旋转矩阵R的分量 r 1 , r 2 , r 3 r_{1},r_{2} ,r_{3} r1,r2,r3分别为坐标系2的基底向量 O 2 X 2 ⃗ 、 O 2 Y 2 ⃗ 、 O 2 Z 2 ⃗ \vec{O_{2}X_{2}}、\vec{O_{2}Y_{2}}、\vec{O_{2}Z_{2}} O2X2、O2Y2、O2Z2在坐标系 O 1 O_{1} O1中的表示。
同理: [ r 11 r 12 r 13 ] T 、 [ r 21 r 22 r 23 ] T 、 [ r 31 r 32 r 33 ] T \begin{bmatrix} r_{11} & r_{12} & r_{13} \end{bmatrix}^{T}、\begin{bmatrix} r_{21} & r_{22} & r_{23} \end{bmatrix}^{T}、\begin{bmatrix} r_{31} & r_{32} & r_{33} \end{bmatrix}^{T} [r11r12r13]T、[r21r22r23]T、[r31r32r33]T分别为坐标系1的基底向量 O 1 X 1 ⃗ 、 O 1 Y 1 ⃗ 、 O 1 Z 1 ⃗ \vec{O_{1}X_{1}}、\vec{O_{1}Y_{1}}、\vec{O_{1}Z_{1}} O1X1、O1Y1、O1Z1在坐标系 O 2 O_{2} O2中的表示。
- 空间点从坐标系2到坐标系1的旋转矩阵R的本质:
- 列分量本质上是坐标系2的X轴、Y轴和Z轴在坐标系1中的坐标;
- R的行分量本质上是坐标系1的X轴、Y轴和Z轴在坐标系2中的坐标。
3. 两个坐标系之间的旋转矩阵和平移向量的相互转换关系
3.1 假设
- 空间的一点 P P P在坐标系2和坐标系1的坐标分别设为 P 2 P_{2} P2和 P 1 P_{1} P1
- 坐标系1到坐标系2的旋转矩阵和平移向量设为: R 1 − > 2 R_{1->2} R1−>2, t 1 − > 2 t_{1->2} t1−>2
- 坐标系2到坐标系1的旋转矩阵和平移向量设为: R 2 − > 1 R_{2->1} R2−>1, t 2 − > 1 t_{2->1} t2−>1
3.2 转换关系推导
-
P 2 − > P 1 P_{2}->P_{1} P2−>P1
- P 1 = R 2 − > 1 P 2 + t 2 − > 1 P_{1} = R_{2->1}P_{2}+t_{2->1} P1=R2−>1P2+t2−>1,变换得:
- P 2 = R 2 − > 1 − 1 P 1 − R 2 − > 1 − 1 t 1 − > 2 P_{2} = R_{2->1}^{-1}P_{1}-R_{2->1}^{-1}t_{1->2} P2=R2−>1−1P1−R2−>1−1t1−>2
-
P 1 − > P 2 P_{1}->P_{2} P1−>P2
- P 2 = R 1 − > 2 P 1 + t 1 − > 2 P_{2} = R_{1->2}P_{1}+t_{1->2} P2=R1−>2P1+t1−>2
-
综上可得:
- { R 1 − > 2 = R 2 − > 1 − 1 = R 2 − > 1 T t 1 − > 2 = − R 2 − > 1 − 1 t 1 − > 2 \left\{\begin{array}{ll} R_{1->2}= R_{2->1}^{-1}= R_{2->1}^{T}\\ t_{1->2}=-R_{2->1}^{-1}t_{1->2} \end{array} \right. {R1−>2=R2−>1−1=R2−>1Tt1−>2=−R2−>1−1t1−>2
- 因为标准旋转矩阵R为单位正交阵
- 因此旋转矩阵互逆,平移矩阵大小不变方向相反















 1682
1682











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









