







matlab中利用jtraj函数自动生成轨迹,如图所示:
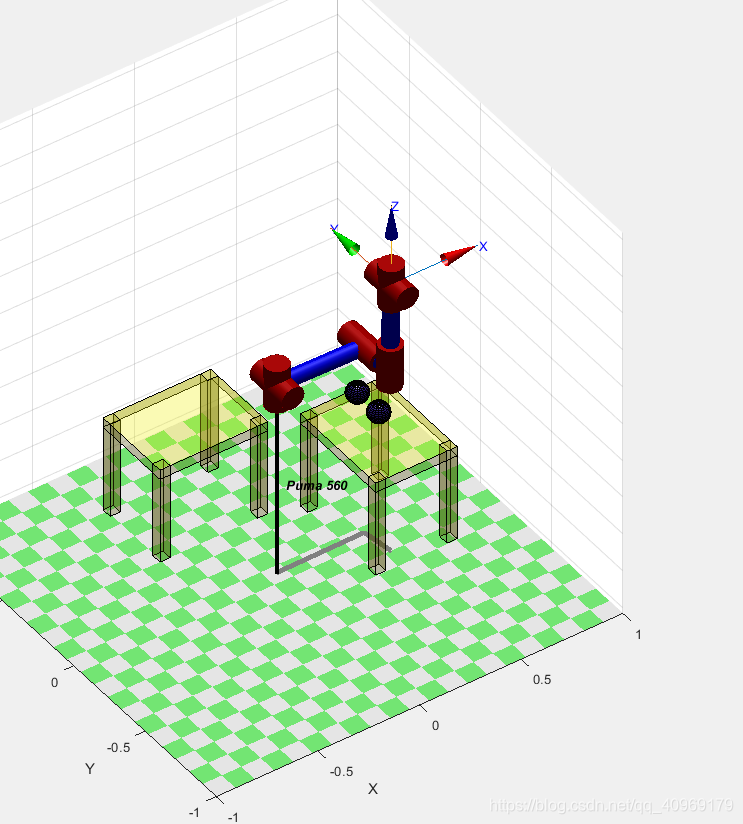
初始状态,如图所示:
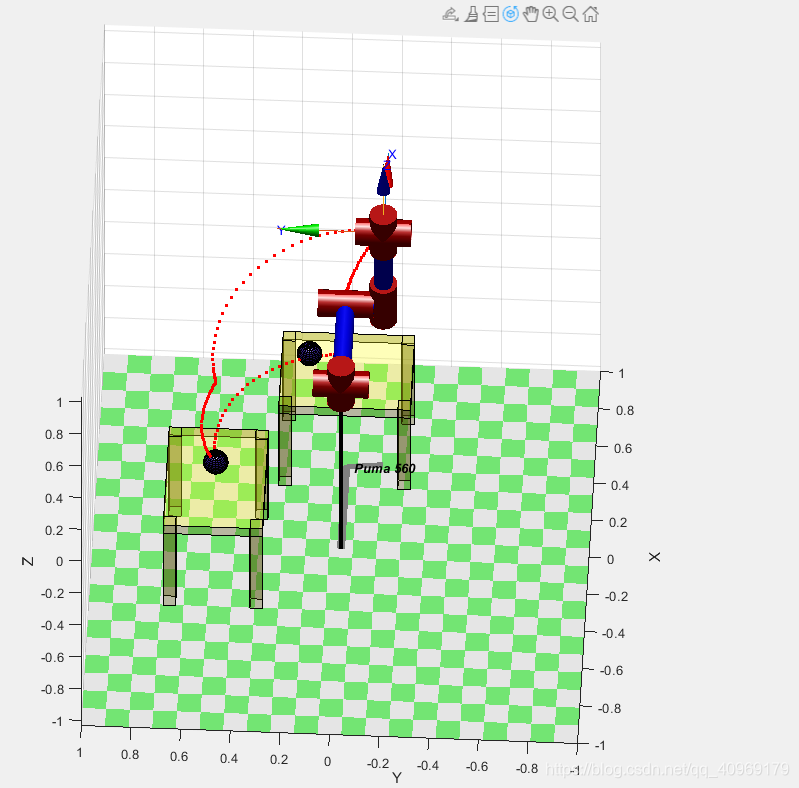
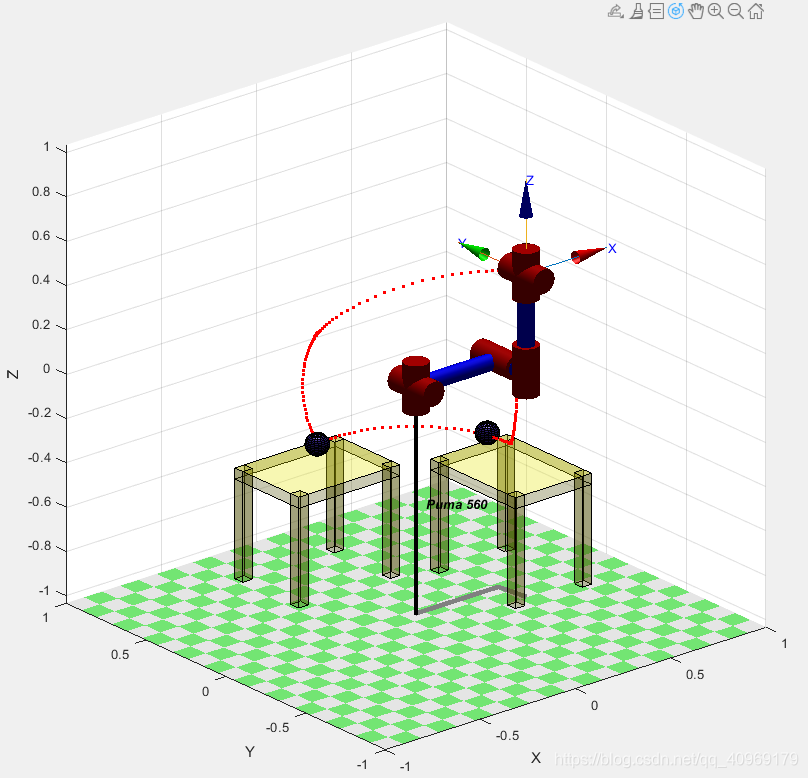
完成动作的过程图
角度一:
角度二:
matla代码:把桌面一的球搬运到桌面二上,使用Jtraj函数自动规划轨迹。
close all;clear all;
clc;
mdl_puma560;
deg = pi/180;
figure
theta = zeros(1,6);
% p560.base([0,0,-0.3]);
p560.plot(theta);
hold on;
%给工作台建模
draw_box([0.3;-0.265;-0.5],[0.7;0.265;-0.55],'y','mesh','k','alpha',0.3);%画放货平台第一个为桌角点,第二个为其对角点坐标
draw_box([0.3;-0.265;-0.5],[0.35;-0.215;-1],'y','mesh','k','alpha',0.3);%画放货平台
draw_box([0.7;-0.265;-0.5],[0.65;-0.215;-1],'y','mesh','k','alpha',0.3);%画放货平台
draw_box([0.3;0.265;-0.5],[0.35;0.215;-1],'y','mesh','k','alpha',0.3);%画放货平台
draw_box([0.7 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 858
858

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









