






 该内容涉及多驱动器同步路径规划的问题,强调了在所有驱动器具有相同最大速度和加速度约束的情况下,需依据位移最大的驱动器来确定总时间和加速阶段时间。通过公式计算各个驱动器的轨迹,确保最小化总时间。例如中提到了三个驱动器,其中一个具有最大位移,其加速和减速时间决定了其他驱动器的速度和加速度配置。负位移的驱动器则需要先减速再加速。最终,所有驱动器的轨迹得以协调,实现时间优化。
该内容涉及多驱动器同步路径规划的问题,强调了在所有驱动器具有相同最大速度和加速度约束的情况下,需依据位移最大的驱动器来确定总时间和加速阶段时间。通过公式计算各个驱动器的轨迹,确保最小化总时间。例如中提到了三个驱动器,其中一个具有最大位移,其加速和减速时间决定了其他驱动器的速度和加速度配置。负位移的驱动器则需要先减速再加速。最终,所有驱动器的轨迹得以协调,实现时间优化。
如果多个驱动器必须协同,那么全部轨迹必须根据最慢的那个进行规划,或者最大位移那个。例如,假设一个动作所包含的多个驱动器以同样的约束条件进行规划(同样最大加速度和速度)。在这样情况下,需要对位移最大的驱动器在最大加速度amax 条件下计算加速阶段时间Ta和总时间T。一旦时间Ta,T确定好,其余的驱动器便可以根据各自的位移hi确定各自的加速度和速度。见3.2.6节

然后公式(3.4)可以用于每条轨迹的计算
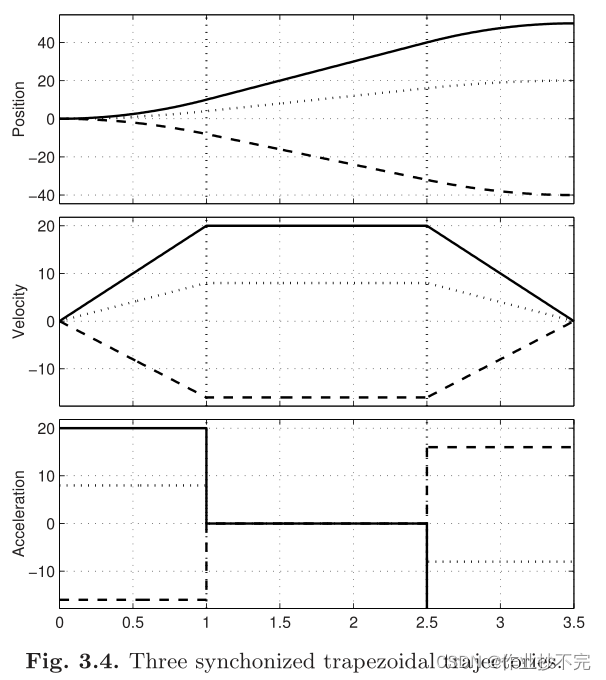
例子3.3:定义三个驱动器(具有相同的最大速度和加速度vmax = 20 、amax = 20),这三个驱动器的位移必须定义,从而保证计算出总时间T最小,三个驱动器的加速阶段或者减速阶段的时间Ta/Td相同。位移定义如下:

a号驱动器有最大位移( = 50),因此总时间T和加速阶段/减速阶段的时间Ta/Td由此驱动器定义。因为
>
/
,所以匀速段存在,然后根据
,
和公式(3.8)可以得到:
![]()
然后,其余驱动器的最大/最小速度和加速度可以计算如下:

注意:b号驱动器的位移为负,所以其加速和减速阶段时间互换(既先减速再加速)。此外因为对称,所以amin = −amax 和vmin = −vmax 。T, Ta 和最大加速度、最大速度可以用于计算三个驱动器的轨迹。结果见图3.4.

















 210
210

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









