







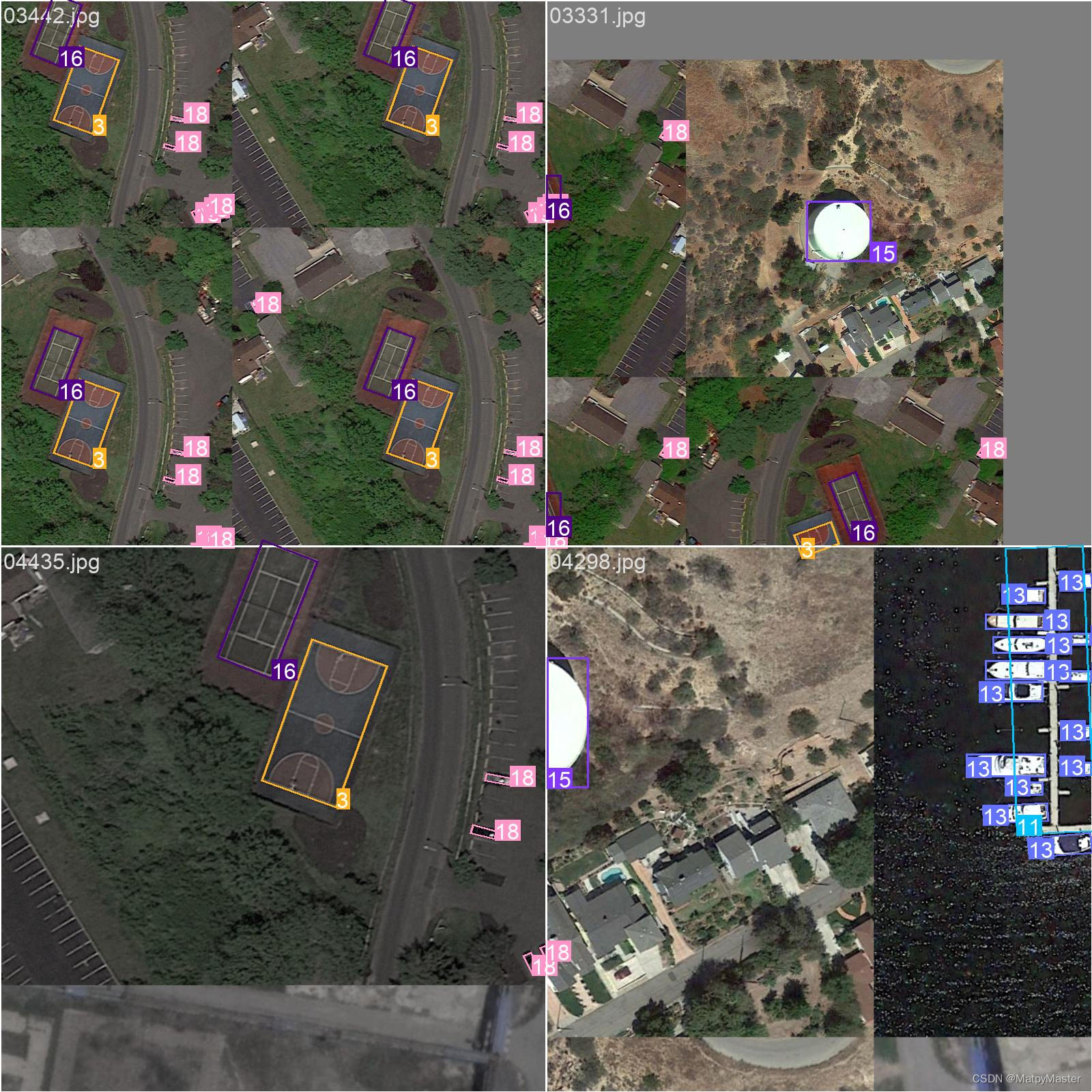
DIOR是一个用于光学遥感图像目标检测的大规模基准数据集。涵盖20个对象类。这20个对象类是飞机、机场、棒球场、篮球场、桥梁、烟囱、水坝、高速公路服务区、高速公路收费站、港口、高尔夫球场、地面田径场、天桥、船舶、体育场、储罐、网球场、火车站、车辆和风磨。
1. DIOR简介
1.1 数据说明
DIOR由23463张遥感图像和190288个目标实例组成,这些目标实例用轴向对齐的边界框手动标记,由192472个轴对齐的目标边界框注释组成。数据集中图像大小为800×800像素,空间分辨率为0.5m ~ 30m。该数据集分为训练验证集(11725张图像)和测试集(11738张图像)。
https://arxiv.org/ftp/arxiv/papers/1909/1909.00133.pdf
DIOR-R数据集是在DIOR数据集的基础上,对目标实例重新标注边框,采用旋转框标注,这样避免了水平框的重叠问题。
https://arxiv.org/pdf/2110.01931.pdf
1.2 DIOR-R数据格式
下载地址:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1805
1805

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











