






什么是力臂
力臂是物理学中的一个重要概念,特别是在杠杆原理中扮演着关键角色。以下是对力臂的详细解释:
定义
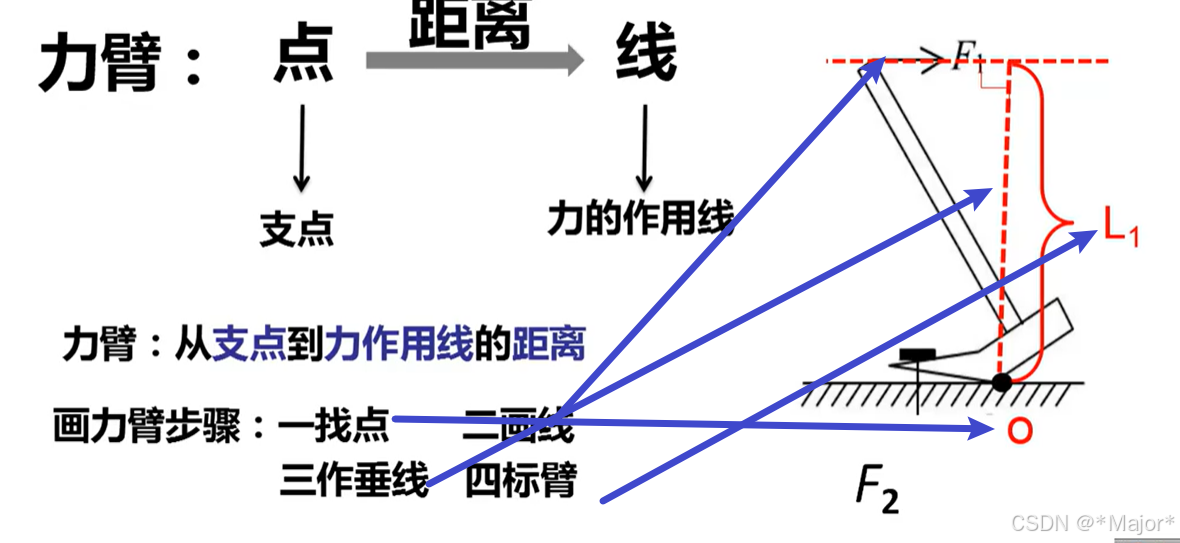
力臂是指支点到力的作用线的垂直距离。这里的“点”指的是杠杆的支点,“线”则是力的作用线,即通过力的作用点沿力的方向所画的直线。与动力对应的力臂被称为动力臂,而与阻力对应的力臂则被称为阻力臂。
特性
- 数学模型:力臂的数学模型可以看作是点到直线的距离。在杠杆原理中,这个距离决定了力对杠杆转动的影响程度。
- 方向性:作用在同一个点上的几个力,若它们的方向不同,那么力臂一般也不同。这是因为力臂是支点到力的作用线的垂直距离,而不同的方向会导致垂直距离的变化。
- 零力臂:若力的作用线通过支点,那么这个力的力臂就一定为零。这是因为此时支点到力的作用线没有垂直距离。
作用
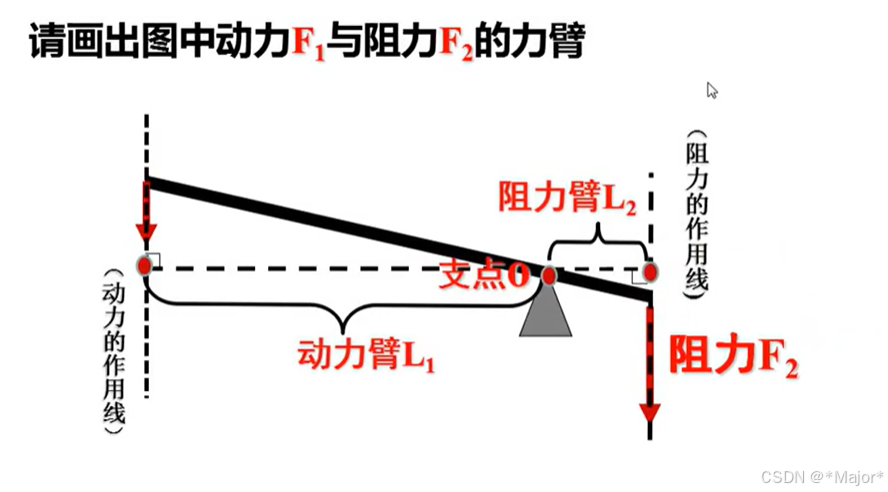
在杠杆原理中,力臂是决定杠杆平衡状态的关键因素之一。杠杆的平衡条件可以表示为动力乘以动力臂等于阻力乘以阻力臂(F1×L1=F2×L2)。这个公式说明了力臂与力之间的关系:在力一定的情况下,力臂越长,产生的转动效果就越大;反之,力臂越短,转动效果就越小。因此,在设计和使用杠杆时,需要根据实际需要选择合适的力臂长度,以达到预期的转动效果。
作法
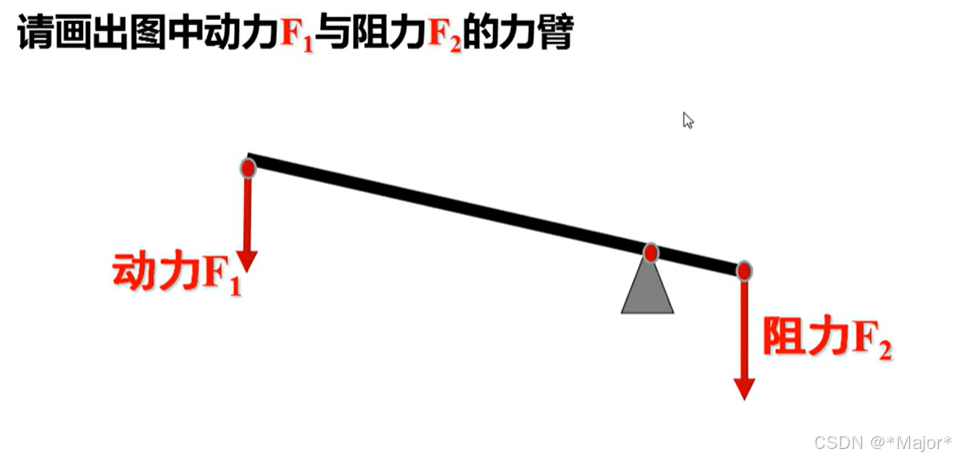
作力臂的一般步骤如下:
- 找支点:首先确定杠杆的支点位置。
- 找力的作用线:然后画出力的作用线,即通过力的作用点沿力的方向所画的直线。
- 作垂线:最后从支点到力的作用线作垂线,该段距离就是力臂。
综上所述,力臂是杠杆原理中的一个重要概念,它决定了力对杠杆转动的影响程度。在设计和使用杠杆时,需要充分理解力臂的定义、特性和作用,并正确作出力臂以指导实践应用。

















 93万+
93万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









