










Hybridnets:多任务端到端感知网络 目标检测+可行驶区域+车道线
Hybridnets:多任务端到端感知网络目标检测+可行驶区域+车道线检测-深度学习文档类资源-CSDN下载
一、学习笔记
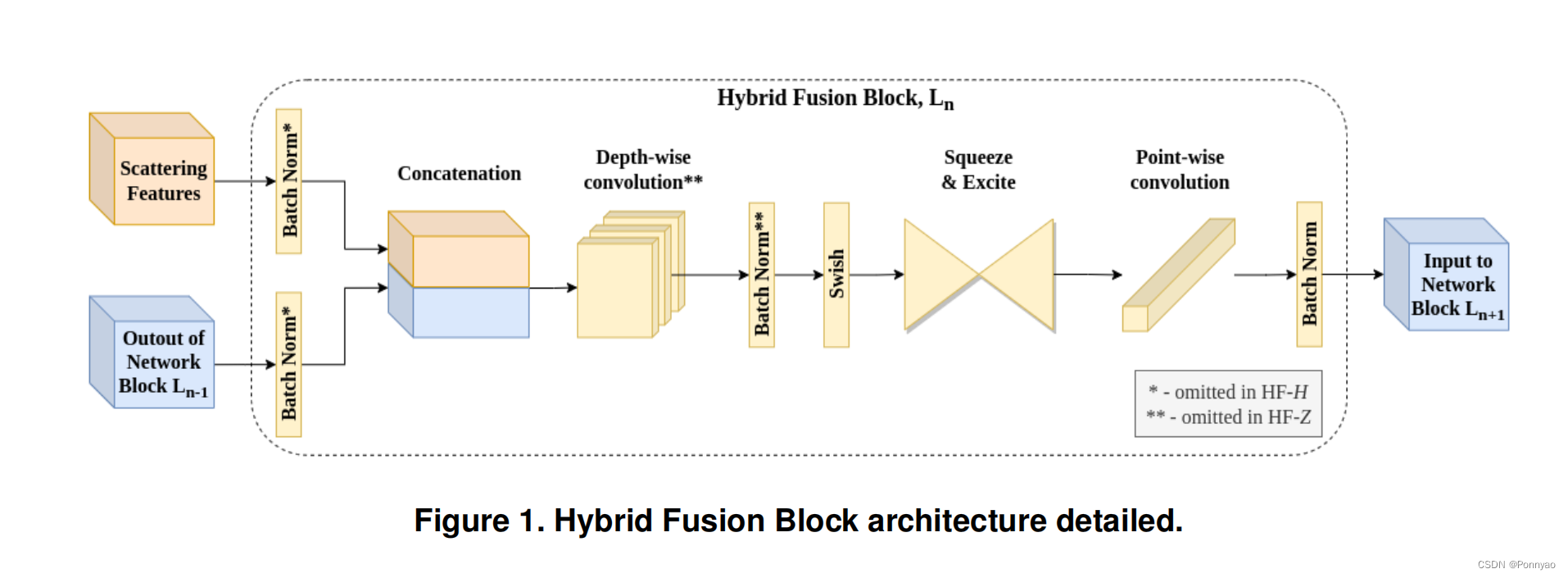
Efficient Hybrid Network: Inducting Scattering Features是2022.3.29 在 ICPR-2022发表的一篇文章。HybridNets是一个用于多任务的端到端感知网,主要集中在交通目标检测,可驾驶区域分割和车道检测。
论文地址: https://arxiv.org/abs/2203.15392
GitHub链接:GitHub - datvuthanh/HybridNets: HybridNets: End-to-End Perception Network
二、测试
1、设备及环境
设备:jetson agx xavier
jetpsck:4.6.1
python3.6
虚拟环境:torch1.10.0+torchvison0.11.1
2、环境搭建
Nvidia jetson系列 agx xavier/orin/nano/tx2 安装pytorch Gpu版_Ponnyao的博客-CSDN博客_xavier安装pytorch
3、下载源码
git clone https://github.com/datvuthanh/HybridNets
cd HybridNets
conda activate pytorch
pip3 install -r requirements.txt4、Demo测试
# Download end-to-end weights
curl --create-dirs -L -o weights/hybridnets.pth https://github.com/datvuthanh/HybridNets/releases/download/v1.0/hybridnets.pth
# Image inference
python hybridnets_test.py -w weights/hybridnets.pth --source demo/image --output demo_result --imshow False --imwrite True
# Video inference
python hybridnets_test_videos.py -w weights/hybridnets.pth --source demo/video --output demo_result5、问题小记
1、pip3 install -r requirements.txt
注释掉requirements.txt中的 numpy>=1.21.2 ,python3.6没有这个版本,不过低版本也没问题。
2、cpu好像跑不起来。

















 6万+
6万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











