









半桥栅极驱动器实现高侧 FET 的 100% 占空比优化设计
在很多半桥驱动应用中,比如DC/DC和电机驱动应用中。要驱动电路内的 FET,半桥栅极驱动器是一种简单方法。但在太阳能优化器或其他一些应用中,通常需要高侧 FET 以 100% 占空比运行。具有自举二极管和电容器的通用半桥栅极驱动器无法实现高侧 FET 的 100% 占空比。 100% 占空比带来的优点就是降低MOS管的开关损耗。
在相对高频的开关电路中,比如DC/DC,开管损耗占损耗一大部分。降低该部分损耗,就得提高FET占空比到100%。
该笔记主要参考Ti应用手册。
1.概述
太阳能优化器常用于在串式逆变器系统中更大限度地提高太阳能电池板的输出功率。为实现这一目标,优化器控制中广泛采用了 MPPT(最大功率点跟踪)算法。MPPT 的基本逻辑是调节优化器的输出电压,这意味着根据输出阻抗来调整 FET 的占空比。优化器中通常使用降压拓扑。当太阳能电池板在最大功率点运行时,如果它的输出电压等于或低于降压转换器的输出电压,优化器就会进入直通模式。
在直通模式下,太阳能电池板的输出功率可直接传递到优化器的输出,这就需要降压转换器的高侧 FET 以 100% 占空比运行,并且低侧 FET 关断。
实际上,FET 的 PWM 信号可以与死区时间互补。而且对于两个 FET 的占空比,高侧 FET 不能直接达到 100% 占空比,低侧 FET 不能从 50% 直接降至 0% 占空比。为实现 MPPT,假设 FET 的两个占空比都是 50%。如果从此刻起光强度持续下降,那么优化器的输入电压,也就是太阳能电池板的输出电压会相应降低。当控制器检测到输出电压低于阈值时,高侧 FET 的占空比会逐渐增加到 100%。
如果我们希望在前面提到的场景中成功使用半桥栅极驱动器,需要考虑两个步骤。第一步是考虑如何实现高侧 FET 的 100% 占空比,另一步是考虑我们在设计过程中可能遇到的风险以及如何解决风险。
2.特定应用场景中的设计和潜在的风险
在常见的半桥栅极驱动器中,自举电路通常用于通过一个电源驱动两个 FET。但具有自举电路配置的半桥栅极驱动器无法以 100% 的占空比驱动高侧 FET。因为低侧 FET 必须导通一定时间,电源才能通过自举二极管为自举电容器充电。否则,自举电容器可能无法提供电源来驱动高侧 FET。
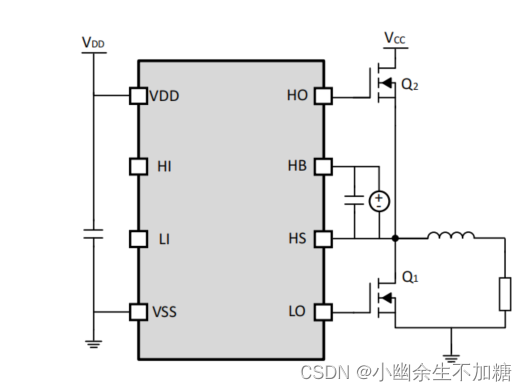
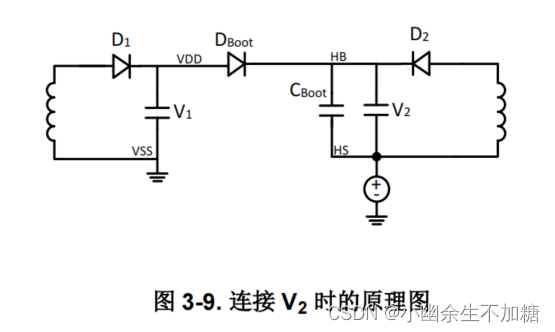
要使用半桥栅极驱动器实现 100% 占空比,一种设计是在栅极驱动器的 HB 和 HS 引脚之间添加额外电源。图显示了具体的原理图。然后,可通过此额外电源而不是自举电容器来提供驱动高侧 FET 的能量。高侧 FET 接着能够以 100% 占空比工作。
潜在风险主要来自于两个原因:
- 高占空比会导致自举二极管中产生高电流应力。
例如,在优化器的直通模式下,高侧 FET 的占空比会逐渐增加到 100%。因此,在转换过程结束时,持续一段时间的高占空比情况会让自举二极管承受高电流应力。 - HB、HS 引脚中连接的额外电源的影响。
实际上,增加一个额外电源可以让栅极驱动器以 100% 占空比驱动高侧 FET。但要,要确保栅极驱动器正常工作,还需在该过程中考虑一些设计注意事项。如原因 1 中所述,设计不当会导致转换过程中自举二极管的电流应力增加。
3.潜在问题分析
3.1 高占空比导致自举二极管中产生高电流应力
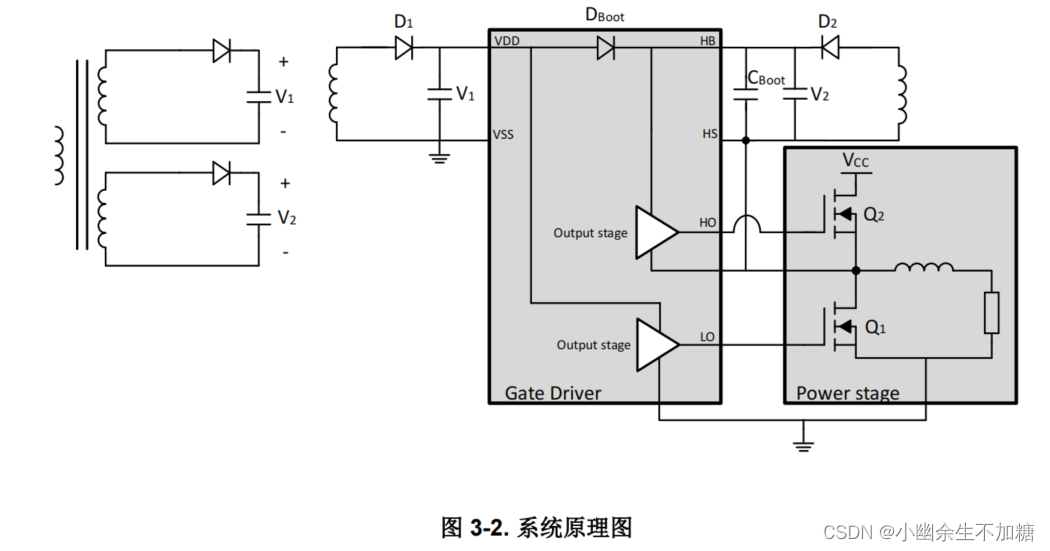
我们分析一下为什么高占空比会导致自举二极管中产生高电流应力,首先假设不涉及电源 V2。以优化器为例,在从降压模式到直通模式的转换过程结束时,高侧 FET 占空比接近 100%,低侧 FET 占空比接近 0%,图 显示了 PWM 信号的时间图。在转换期间有四种运行模式。图 3-2 显示了系统的等效电路。
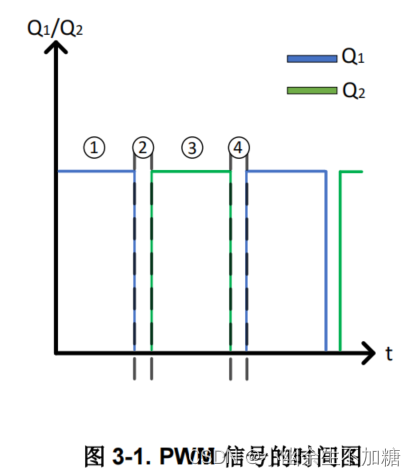
• 蓝线:低侧 MOSFET 栅源 PWM 信号
• 绿线:高侧栅源 PWM 信号
在实际应用中,产生这些电源的常用方法是使用具有多个绕组的 Fly-Buck 或反激式拓扑。假设两个电源由不同的绕组产生,并且分别连接到 VDD、GND、HB 和 HS。为了便于理解,下面对不同模式进行了分析。
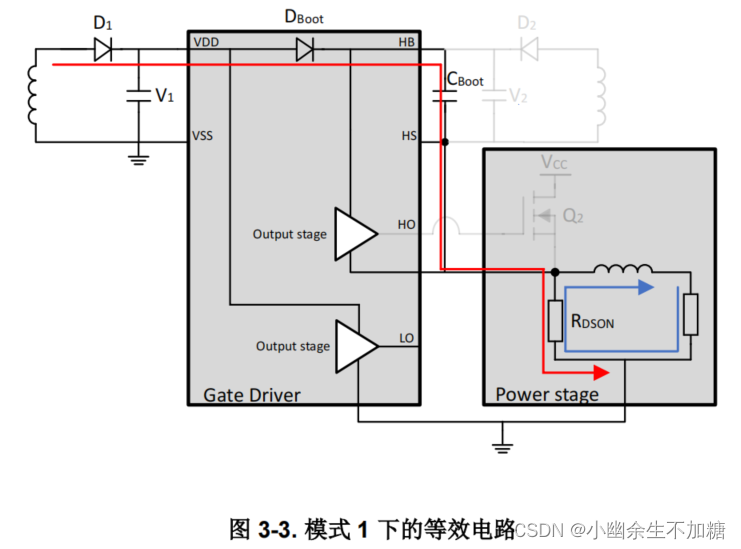
3.1.1 模式1
在此模式下,Q1 导通,Q2 关断。图 3-3 展示了该模式的等效电路。
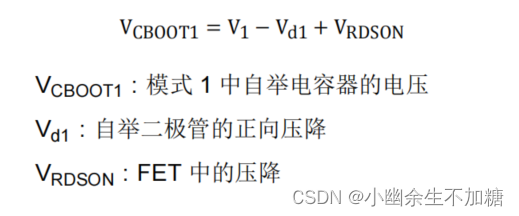
因为当 Q1 导通时,FET 可以建模为电阻器,该值等于 RDSON。V1 可以为自举电容器充电,因此自举电容器的电压会逐渐升高。有一点需要考虑,在此模式下,电感器电流可以继续从接地端流向 HS 点。电感器电流会产生压降,此外,以接地端为基准的 HS 电压会为负值。这种现象会让自举电容器充电至更高的值。假设自举二极管中的压降是 FET 体二极管中的 Vd1 和 Vd2,我们可以得到自举电容器中电压值的公式为:
但在实践中,自举电容器充电需要一定的时间,如果时间有限,自举二极管的电压就达不到理论的最大值 VCBOOT1。此外,在模式 2 或 4 中,如果电容器已充电至高于 VCBOOT1 的值,则自举电容器无法充电。
3.1.2 模式2
模式 2 是 Q1 关断后且 Q2 仍保持关断的死区时间期间。此模式与模式 1 类似。唯一的区别是电感器电流会流过 Q1 的体二极管。在大多数情况下,体二极管的压降高于 VRDSON。这意味着自举电容器之间的电压差会高于模式 1 中的电压差,并且可能会使自举电容器过充。表示自举电压值的公式是:
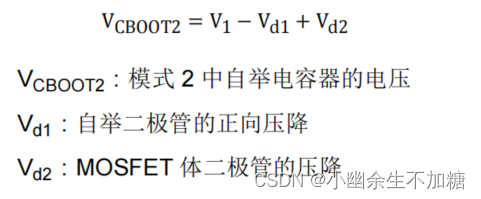
因为 Vd2 大于 VRDSON,所以 VCBOOT2 会大于 VCBOOT1。实际上,如果我们不计算 HS 接地电压的电势振荡,自举电容器的电压在此模式下是最大值。图 3-4 显示了模式 2 下的等效电路。
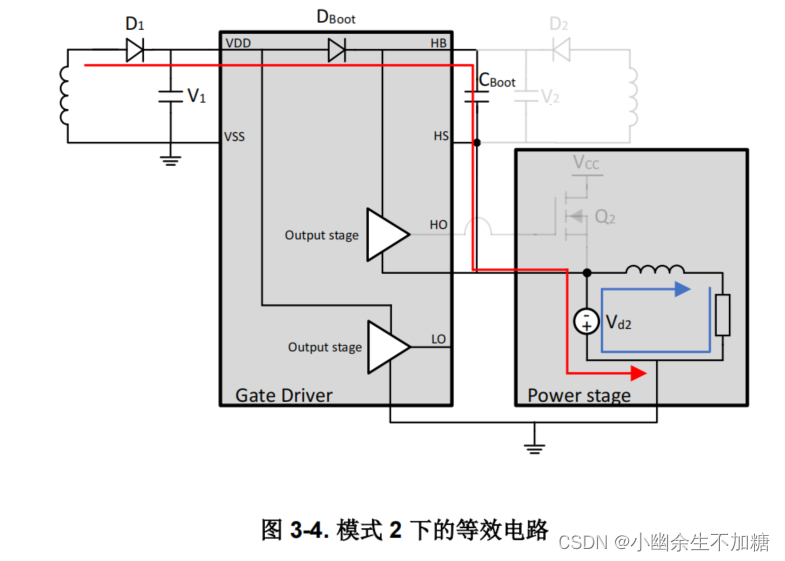
3.1.3 模式3
在此模式下,Q1 保持关断状态,而 Q2 逐渐导通。图 3-5 显示了模式 3 下的等效电路。
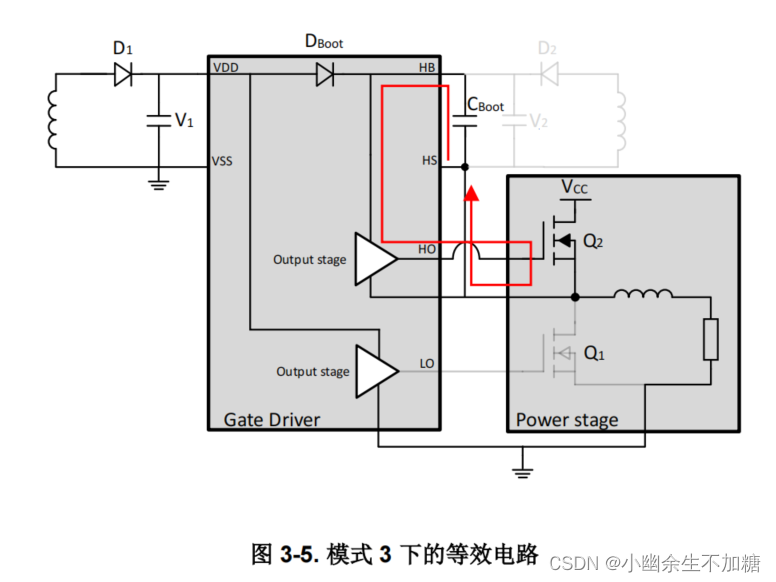
假设功率级的输入电压为 VCC 。由于 Q2 的导通过程,HS 节点中的电压可以从 Vd2 快速增加到 VCC。因此,HB 接地电压会相应升高。这会使自举二极管变为反向偏置,会发生反向恢复过程,反向电流会流过自举二极管。这是造成栅极驱动器损坏的主要风险。
3.1.4 模式4
这是 Q2 和 Q1 都关断后的另一个死区时间期间。模式 4 也与模式 2 类似。它们的细微差异是,自举电容器现在提供电源来驱动高侧 FET。在稳态下,自举二极管的电压将降到最低值。其他情况与模式 2 相同。
总之,功率级对栅极驱动器的影响是改变 HS 节点中的电压电势。此外,这还会影响自举二极管的工作状态,即正向导通或反向偏置。
前面讲过自举电路的工作原理,HB-HS 中额外电源的影响可以稍后讨论。首先,可以通过仿真来解释为什么较高占空比会导致自举二极管中产生较高的电流应力。
在使用 PSpice™ 进行仿真时,将 Q2 的占空比设置为 50%,并且先使用没有反向恢复特性的自举二极管。自举电容器的值为 100nF。
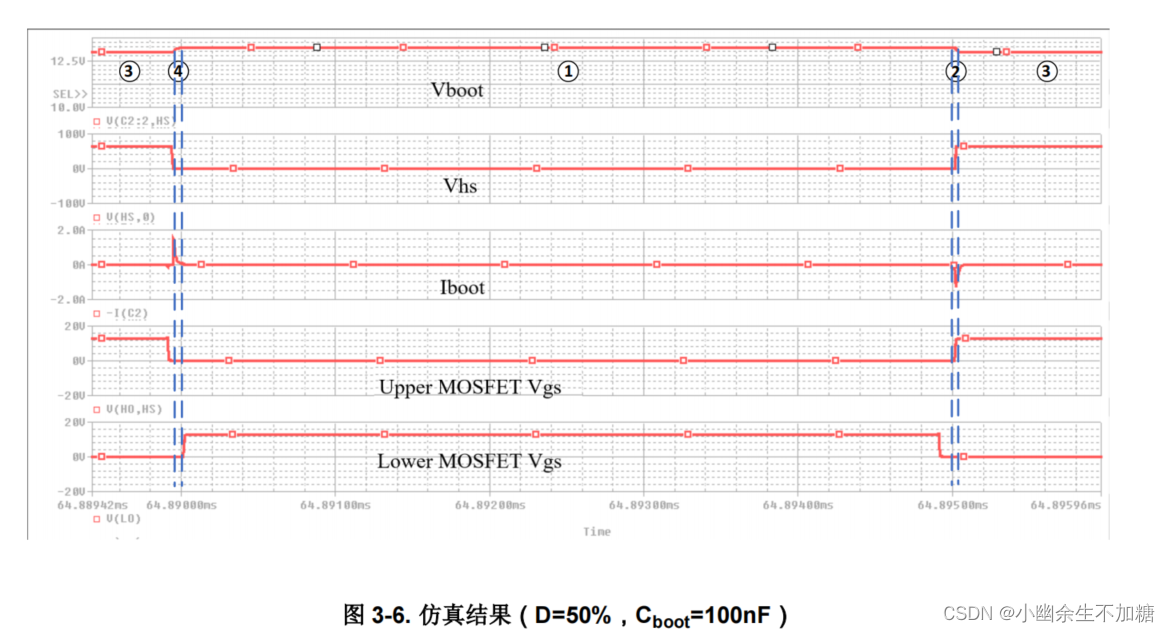
D:高侧 FET 的占空比
Vboot:自举电容器的电压
Vhs:HS 接地电压
Iboot:流入自举电容器的电流
如图 3-7 所示,自举电容器可以在模式 4 下充电。因为 Vboot 已增加到高于模式 1 下最大电压的值。模式 1 下自举电容器的电压可以保持不变。在从模式 2 到模式 3 的转换过程中,自举电容器可以提供电源来导通 FET,所以我们可以看到 Iboot 中的负电流和 Vboot 中的压降。仿真结果基本验证了理论分析。
如果提高占空比,看看会发生什么情况。我们将占空比增加到 99%。
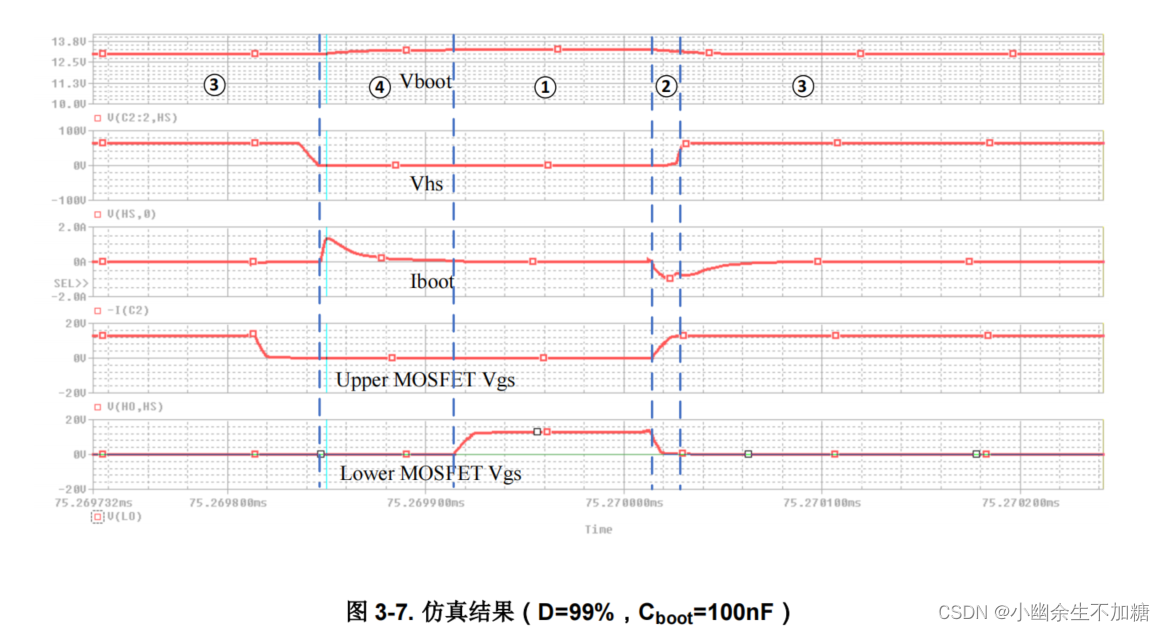
如图所示,转换更紧密,这意味着自举二极管可以在短时间内承受更高的电流应力。
使用相同的 100nF 自举电容器,但在二极管中添加反向恢复特性来进行仿真。如图所示,大的反向电流会流过体
二极管。
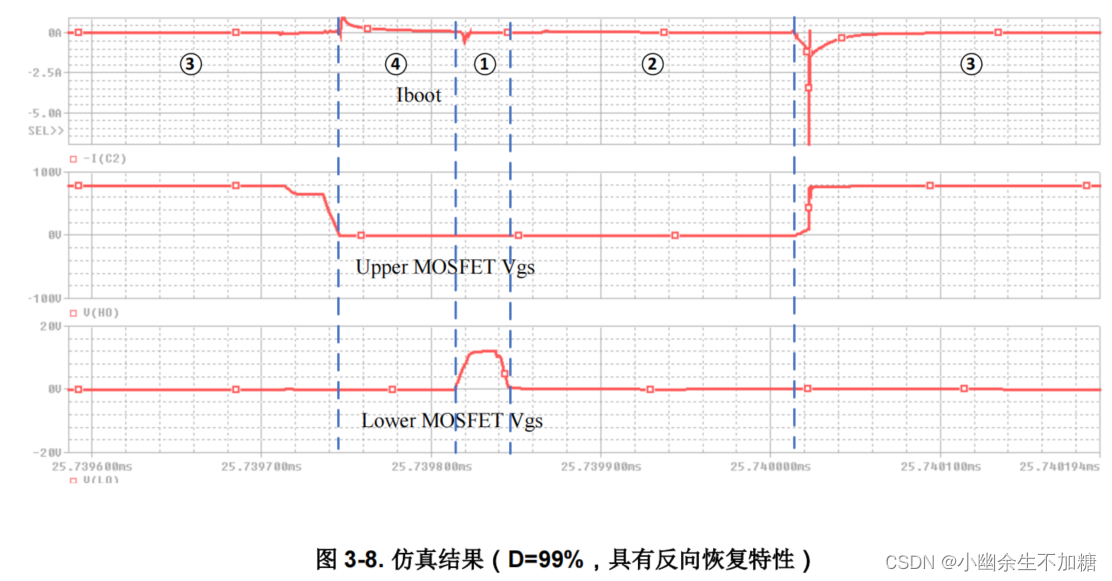
另一个要点是,如果我们考虑自举二极管的反向恢复电流,那么在高占空比下的电流应力可能比正常占空比更严重。反向恢复电流与二极管承受反向偏置时的反向恢复时间和正向电流相关。反向恢复时间主要由二极管的物理特性决定。因此,在此情况下,我们可以考虑正向电流。与小电容相比,较大的自举电容具有更大的时间常数。
因此,如果高侧 FET 的占空比接近 100%,则没有足够的时间为更大的电容器充电,并且在工作模式更改为模式 3(高侧 FET 导通,低侧 FET 关断)时,电流可以保持更高的值。这会导致反向恢复电流比使用较小自举电容器时更高,因为如果时间保持不变,较小电容器的充电电流会降至低侧值。但在正常占空比下,充电或放电电流都可以降至较低值。
实际上,如果我们在 HB-HS 中连接额外电源并且没有正确设计,则会使等效电容增加并导致更高的反向恢复电流。
3.2 额外电压源的影响
本章将讨论 HB-HS 引脚中连接的额外电源的影响。
在考虑额外电源的影响时,典型原理图如图 3-9 所示。根据分析,功率级对栅极驱动器的影响可以建模为在 HS 引脚和接地中连接的电源。电源电压值将从 Vd2 变为 VRDSON 再变为 VCC。
正常运行过程是,在模式 3 下,由 V 2 提供驱动 Q2 的所有电源。在模式 1 下,由 V1 提供导通低侧 FET 的所有电源。因此,现在没有电流流过自举二极管,可以将自举电容器视为滤波电容器。自举二极管中的电流应力为零,因为没有电流流过。
在大多数设计中,我们通常让 V1 大致等于 V2,但这在特定应用中会导致一些问题。关键点是 V1 和 V2 之间的电压差。
如果让 V1>V2+Vd1,那么自举电路将像上述分析一样正常工作。由于输出电容器与自举电容器并联,并且在所有工作模式下,HB-HS 之间的电压都大于 V2,因此 D2 将一直承受反向偏置。这意味着系统中不涉及 V2。与正常的自举电路运行方式相比,该情况的唯一区别是输出电容器与自举电容器并联,这意味着等效电容增加。正如以上分析,这将在自举二极管中导致更严重的电流应力。
但有一个例外,如果 FET 消耗的电容器功率过大,V2 将对自举电容器充电,这意味着自举电容器的电压已被钳位。但这对解决方案的积极影响有限。
根据以上分析,我们进行了仿真和实验来验证理论。
在图 3-10 和图 3-11 中,我们比较了瞬态期间流入自举电容器的电流。
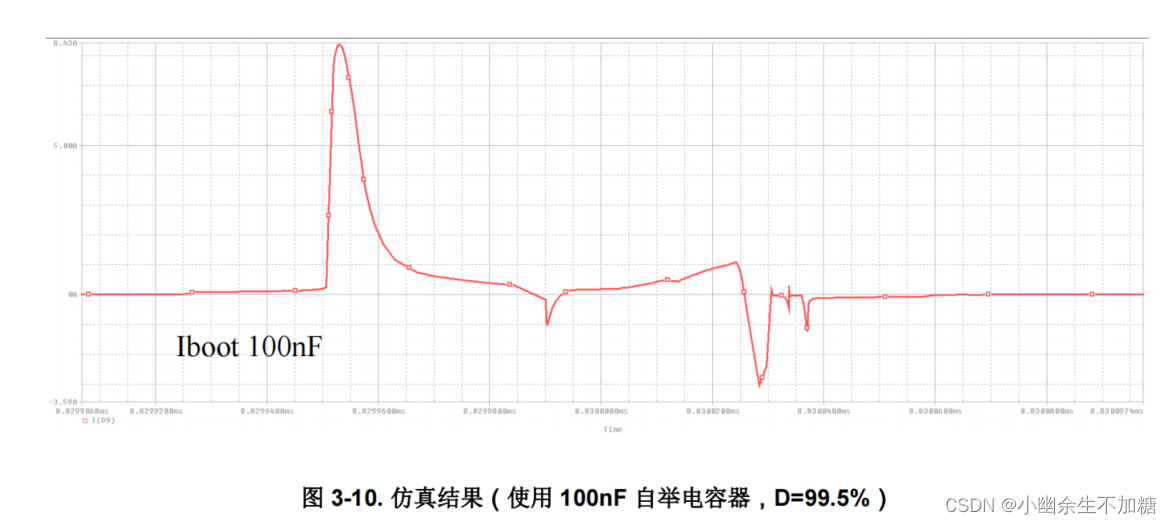
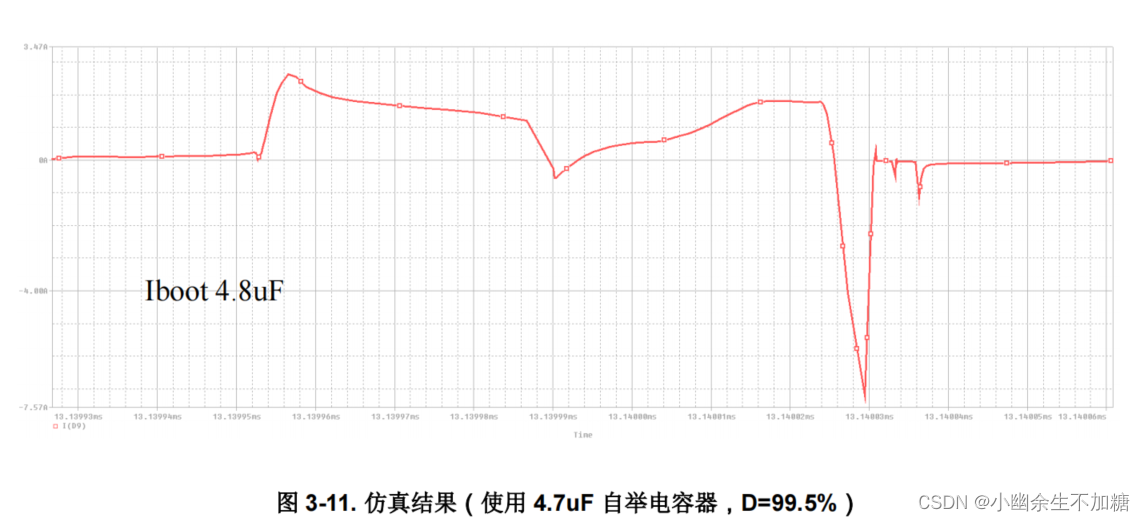
如仿真结果所示,如果增加自举电容,反向恢复电流会大大增加。在产品应用中,栅极驱动器很可能会发生故障。

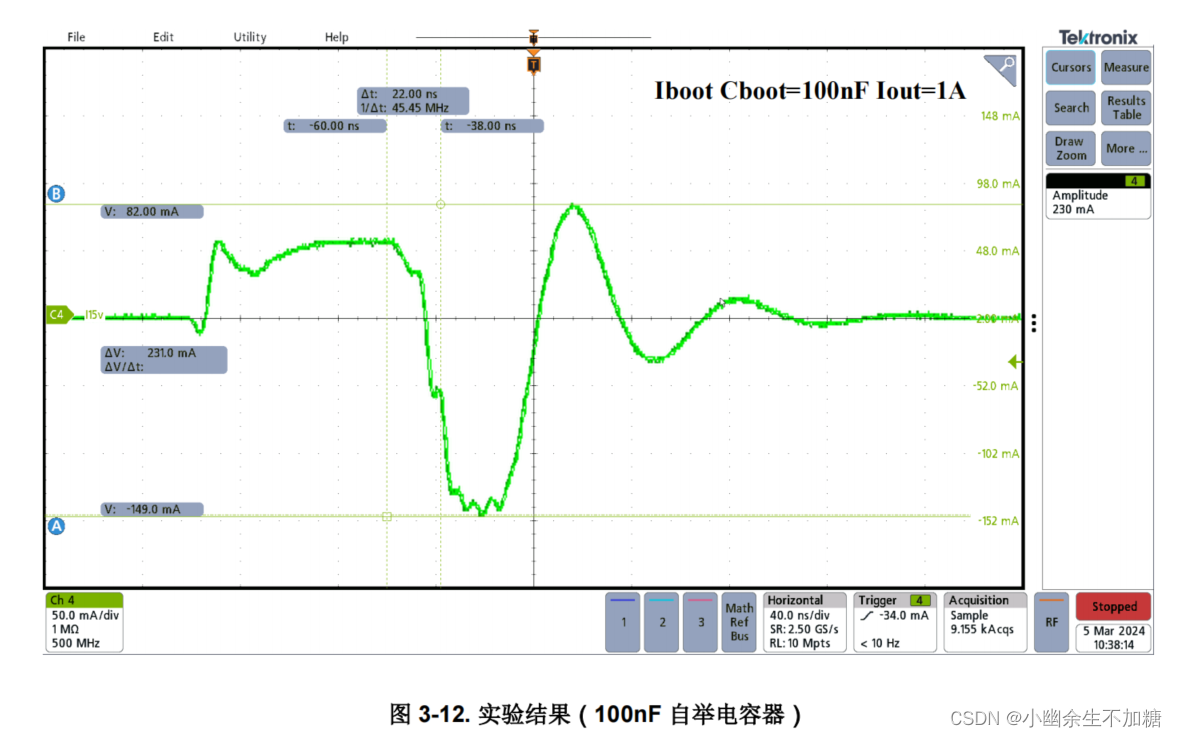
接下来,我们使用 LM76003 来验证理论,测试规格如表 3-1 所示。电流探针用于测试从 HB 引脚流向自举电容器的电流。从图 3-12 和图 3-13 中可以看出,随着自举电容的增加,反向恢复电流也从 -149mA (100nF) 增加到 -165mA (4.8uF)。如果我们使用 UCC27282 或其他栅极驱动器 IC 来构建分立式高功率电源,在电容增加时,反向恢复电流幅度和压摆率会变大。
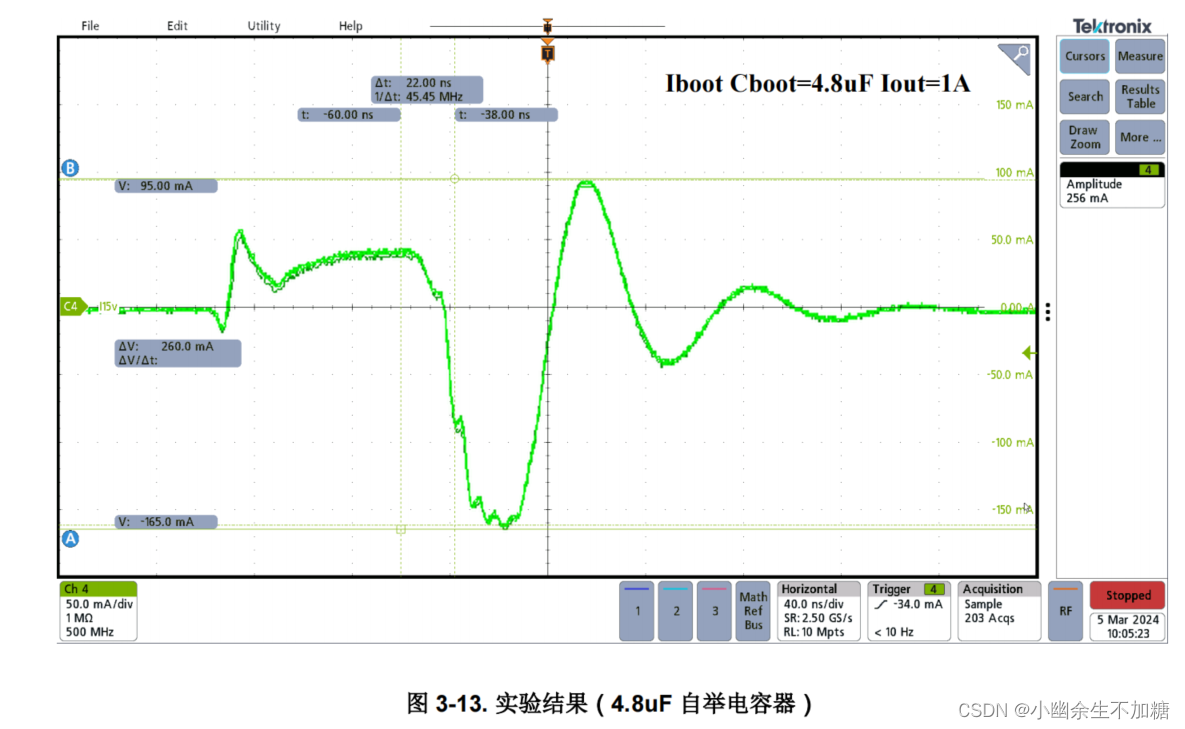
如仿真和实验结果所示,如果 V1>V2-Vd1,则因为等效电容增加,电流应力也随之增加。在产品应用中,此过程可能会导致栅极驱动器发生故障。
4.设计建议
为了正确实现此设计,V2 必须大于 V1。
当 V2 大于 V1 时,自举二极管可以始终保持反向偏置,这意味着 V1 只能为栅极驱动器和低侧 FET 的内部电路供电。驱动高侧 FET 的能量可来自 V2。
根据前面的分析,我们还可以提高栅极驱动器的电流能力来避免风险。建议添加外部自举二极管,如肖特基二极管或快速恢复二极管。
也可以只使用半桥栅极驱动器,而无需内置自举二极管。因为在本设计中,自举二极管可以一直在反向偏置下工作,所以我们只需移除该二极管,这样就不存在电源振幅要求。例如,我们可以使用 UCC27888 来简化设计流程。



















 983
983

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











