
 关注
关注
 分享
分享
路拾遗37
公众号:三十七进制
展开
-
DSO在Euroc上运行经验贴,关于时间戳为0的解决方法
注意这里files后的路径是存放Euroc数据集的路径,另外有一个重要的问题在于需要在“data”文件夹下放置“times.txt”,此文件每行包含文件名、时间戳、曝光时间(Euroc没有),这个times.txt可以用Euroc/mav0/cam0下的data.csv来生成,写一个python四行就可以搞定了。网上DSO基本上都是在TUM数据集上跑得,教程也比较多,写论文需要,使用DSO跑了一下Euroc数据集,踩了很多坑,花了一天的时间才调通,记录一下。原创 2023-12-19 00:33:57 · 266 阅读 · 0 评论 -
Linux 下在Shell脚本中创建新终端执行多个命令
x 后面的为要在打开的终端中执行的脚本,根据需要自己修改就行了。最后的exec bash;是让打开的终端在执行完脚本后不关闭。-t 为打开终端的标题,便于区分。原创 2023-01-30 10:33:21 · 1877 阅读 · 1 评论 -
机器人学习&工具超全指南
传感器融合技术,目前还有很多问题可以探索,因为传感器的延时、不均匀的信号,会给定位系统造成困扰,如何去除这些干扰,需要建立比较复杂的非线性优化问题,具体可以关注香港科技大学Shaojie Shen的工作。建议学习一下车辆运动学、动力学基础,自动驾驶规划常用的一些方法,比如lattice,hybrid a*,二次规划等,开源的自动驾驶框架如apollo、autoware,以及一些仿真工具如carla,lgsvl等,另外就是刷一刷编程题。,最关键的问题就是如何实时高精度的识别和定位物体,包括位置和姿态。原创 2022-08-20 12:04:55 · 1074 阅读 · 0 评论 -
运行组件没有问题,而rqt出现问题
File "/opt/ros/melodic/lib/python2.7/dist-packages/rqt_gui/main.py", line 65, in main hash(os.environ['ROS_PACKAGE_PATH']))) File "/opt/ros/melodic/lib/python2.7/dist-packages/qt_gui/main.py", line 600, in main plugin_manager.discover()原创 2022-06-07 11:52:14 · 520 阅读 · 1 评论 -
视觉SLAM十四讲学习笔记——ch13 设计SLAM 系统
文章目录Bug调试参考博客要暂时转去学习机械臂控制相关,这部分留一个坑,以后有时间,手撕一遍代码,现在先做项目调试.Bug调试这里报错是因为还没安装 Geset 库,安装教程可参考博客: [Ubuntu]GTest安装和测试或者直接执行下面指令进行安装:sudo apt-get install libgtest-devcd /usr/src/gtestsudo mkdir build cd buildsudo cmake .. //一定要以sudo的方式运行,否则没有写入权限sud原创 2022-05-01 11:12:23 · 1637 阅读 · 1 评论 -
视觉SLAM十四讲学习笔记——ch12建图
文章目录12.1 理论部分12.2 实践部分12.2.1 单目稠密重建12.2.2 RGB-D稠密建图八叉树建图-octomap_mapping点云-网格建图-pointcloud_mappingsurfel重建 -surfel_mappingBug调试参考博客12.1 理论部分可参考博客:SLAM14讲-ch12建图笔记视觉SLAM十四讲:回环检测-知识点+代码12.2 实践部分12.2.1 单目稠密重建从网址下载数据: test_datahttps://rpg.ifi.uzh.ch/原创 2022-04-30 21:50:40 · 2702 阅读 · 5 评论 -
视觉SLAM十四讲学习笔记——ch11回环检测
文章目录11.1 理论部分11.2 实践部分11.2.111.2.2调试bug参考资料11.1 理论部分可参考博客:视觉SLAM十四讲:回环检测-知识点+代码11.2 实践部分11.2.111.2.2调试bug安装下载 DBoW3库在进行编译程序前,先需要安装DBoW,第二版的安装文件下载链接如下所示:DBow3下载完成后,安装方法很简单,将文件存放在你想存放的文件夹里面,进入DBoW-master文件夹:mkdir buildcd buildcmake ..makesudo原创 2022-04-30 19:14:50 · 1542 阅读 · 0 评论 -
视觉SLAM十四讲学习笔记——ch10 后端2
文章目录10.1理论部分10.2实践部分10.2.1 利用ceres进行BA优化(多个相机和路标点)10.2.2调试遇到问题bug参考博客10.1理论部分推荐参考博文推导:SLAM十四讲-后端2-ch10-代码注释(位姿图优化)SLAM14讲学习笔记(七)后端(BA与图优化,Pose Graph优化的理论与公式详解、因子图优化)10.2实践部分10.2.1 利用ceres进行BA优化(多个相机和路标点)代码及详细注释如下:结果如下所示:10.2.2代码及详细注释如下:结原创 2022-04-29 21:44:20 · 1949 阅读 · 0 评论 -
视觉SLAM十四讲学习笔记——ch9后端1
文章目录9.1理论部分9.2实践部分9.2.1 利用ceres进行BA优化(多个相机和路标点)9.2.2利用g2o进行BA优化(多个相机和路标点)调试遇到问题bug参考博客9.1理论部分推荐参考博文推导:视觉SLAM十四讲学习笔记——第九讲 后端优化(1)slam十四讲-ch9(后端1)-卡尔曼滤波器公式推导及BA优化代码实现【注释】(应该是ch13前面最难的部分了)9.2实践部分9.2.1 利用ceres进行BA优化(多个相机和路标点)代码及详细注释如下:#include <io原创 2022-04-29 14:45:49 · 2340 阅读 · 0 评论 -
视觉SLAM十四讲学习笔记——ch8视觉里程计2
!!!温馨提示 修改文件路径 😃一堆报错Consolidate compiler generated dependencies of target optical_flow[ 25%] Building CXX object CMakeFiles/optical_flow.dir/optical_flow.cpp.o[ 50%] Linking CXX executable optical_flow[ 50%] Built target optical_flow[ 75%] Buil原创 2022-04-29 11:23:35 · 1517 阅读 · 0 评论 -
视觉SLAM十四讲学习笔记——ch7视觉里程计1
文章目录错误:这里需要重新安装Sophus模板库,前面chp4代码比较简单,我用的而是非模板库,通过修改头文件等方式也调试通过,但是为了之后章节调试的方便,我觉得定重新改用模板版库,安装之前记得将usr Sophus文件夹删除如下:sudo rm -rf /usr/local/include/sophus sudo rm -rf /usr/local/lib/libSophus.solocate Sophus //大小写有区别locate sophus //查看一下有没有删除干净安装模板原创 2022-04-15 10:05:12 · 1359 阅读 · 0 评论 -
视觉SLAM十四讲学习笔记—ch6 关于bug aka class ceres::internal::FixedArray<double, 3>}’ has no member named
文章目录遇到BUGBUG解决遇到BUGmake 直接报错搜索相关贴子,初步判断是由g2o版本不一致,导致的指针问题,我这个好像是安装了旧版本,需要更新到新版本,才能使用智能指针.关于解决方案可以参考该帖子于g2o新版本编译出错的原因及解决办法,不过这个帖子好像是要用旧版本替换新版本,SLAMbook2思路相反.ubuntu卸载g2o库最后,可以输入locate g2o命令来验证是否删除干净。在安装g2o库时,又报cmake 版本问题,额鹅鹅鹅只能安装新的版本,由于之前安装了ROS,自带有cm原创 2022-04-07 15:02:56 · 3793 阅读 · 1 评论 -
视觉SLAM十四讲学习笔记——ch6 非线性优化
文章目录6 非线性优化6.1状态估计问题6.1.1批量状态估计与最大后验估计6.1.2 最小二乘的引出6.1.3 例子:批量状态估计6.2非线性最小二乘6.2.1 一阶和二阶梯度法6.2.2 高斯牛顿法6.2.3 列文伯格---马夸尔特方法理论部分小结6.3 实践:曲线拟合问题6.3.1 手写高斯牛顿法6.3.2 使用Ceres进行曲线拟合6.3.3 使用g2o进行曲线拟合6 非线性优化g2o库学习非线性优化_曲线拟合_g2o图优化_最小二乘优化示例ceres库学习Ceres Solver 官方教原创 2022-04-06 17:21:34 · 1897 阅读 · 2 评论 -
视觉SLAM十四讲学习笔记——ch5 相机与图像
文章目录5. 相机与模型5.1 相机模型5.2 图像5.3 实践5.3.1 Open CV的基本使用方法5.3.2 图像去畸变5.4 3D视觉5.4.1 双目视觉5.4.2 RGB-D视觉5.5 利用 KDevelop IDE编译器 编译执行文件5. 相机与模型5.1 相机模型理论参考博客:1.《视觉SLAM十四讲》相机位姿与相机外参的区别与联系2.《视觉SLAM十四讲》学习笔记:第5讲相机与图像5.2 图像理论参考博客:1.视觉SLAM十四讲学习笔记-第五讲-图像和实践5.3 实践原创 2022-04-01 19:46:15 · 4858 阅读 · 0 评论 -
视觉SLAM十四讲学习笔记——ch4李群与李代数代码实践
文章目录4 李群和李代数4.1 基础知识---群4.2 李群与李代数4.2代码实践4.2.1 Sophus的基本使用方法4.2.2 例子:评估轨迹的误差4.2.3 章节小结4 李群和李代数4.1 基础知识—群4.2 李群与李代数李代数:与李群对应的一种的结构,位于向量空间,通常记作so(3),se(3).具体李群与李代数基础可参考博客 SLAM学习——李群与李代数理论推导部分可参考博客:视觉SLAM十四讲CH4代码解析及课后习题详解4.2代码实践4.2.1 Sophus的基本使用方原创 2022-03-31 21:12:20 · 981 阅读 · 1 评论 -
Eigen库-学习参考博客汇集
文章目录3.1 Eigen中四元数、欧拉角、旋转矩阵、旋转向量之间的转换持续更新...3.1 Eigen中四元数、欧拉角、旋转矩阵、旋转向量之间的转换1.Eigen中四元数、欧拉角、旋转矩阵、旋转向量之间的转换2.Eigen : 四元数、欧拉角、旋转矩阵相互转换3.eigen 中四元数、欧拉角、旋转矩阵、旋转向量...原创 2022-03-31 16:12:14 · 104 阅读 · 0 评论 -
视觉SLAM十四讲学习笔记——ch3-三维刚体运动理论篇
文章目录3.1 旋转矩阵3.1.1点与坐标系3.1.2 坐标系中的欧式变换3.1.3 变换矩阵与齐次坐标3.2 Eigen库的使用3.3 旋转向量和欧拉角3.3.1 旋转向量3.3.2 欧拉角3.4四元数3.4.1 四元数的定义3.4.2 四元数的运算3.4.3 用四元数表示旋转3.4.4 四元数到旋转矩阵的转换3.5 补充小萝卜的例子解释,坐标在不同坐标系转换参考博客3.1 旋转矩阵3.1.1点与坐标系点乘叉乘法向量的方向成右手法则,所以叉乘的顺序是会有影响的。反对称矩阵反对成矩阵(原创 2022-03-31 16:06:31 · 544 阅读 · 0 评论 -
视觉SLAM十四讲学习笔记----ch3 Eigen代码实践
目录1. 编译2 .运行useEigen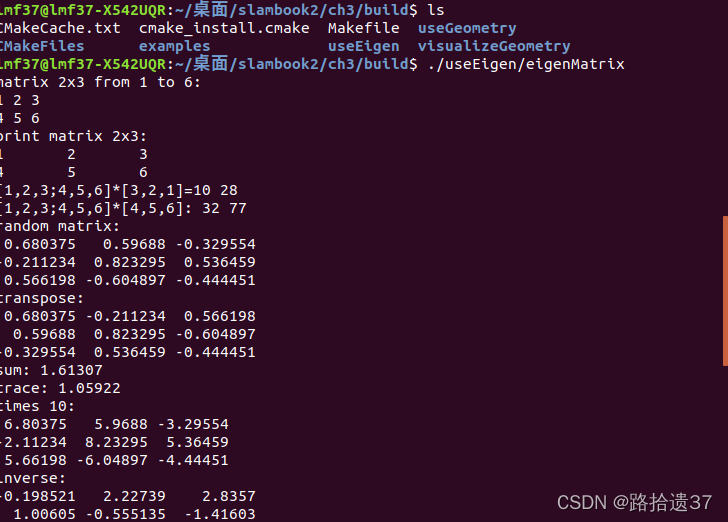3. Eigen几何模块1. 编译cmake:根据CMakeList.t原创 2022-03-31 12:45:04 · 1487 阅读 · 0 评论 -
ubuntu系统编译学习gcc&g++
目录1. 什么是gcc / g++2.g++编译流程:在这之前,我一直以为gcc和g++是一个东西,只是有两个不同的名字而已,今天在linux下编译一个c代码时出现了错误才找了一下gcc和g++的区别。1. 什么是gcc / g++首先说明:gcc 和 GCC 是两个不同的东西GCC:GNU Compiler Collection(GUN 编译器集合),它可以编译C、C++、JAV、Fortran、Pascal、Object-C、Ada等语言。gcc是GCC中的GUN C Compiler(C原创 2022-03-30 17:22:37 · 616 阅读 · 0 评论 -
视觉SLAM十四讲学习笔记---Hello SLAM ch1&ch2
目录1. vim基础保存退出命令i 切换插入esc 退出编译模式输入 :(注意`:`要输入2. 截图快捷键(小kills)3. 编译helloslam程序3.1 使用g++命令编译4. 使用cmake编译4.1 编写 cmake 文件4.2调用cmke命令新建工程4.3 g++与cmake编译区别4.4使用库文件来实现hello4.5 使用库文件5. 使用IDE5.1新建工程5.2添加相应代码-使用库文件5.3 `构建`,结果如下:5.4 执行程序5.5 调试运行1. vim基础保存退出命令i 切原创 2022-03-30 17:11:06 · 1155 阅读 · 0 评论