




 本文探讨了非线性优化中的状态估计、最小二乘方法和曲线拟合技术,包括批量状态估计、高斯牛顿法、列文伯格-马夸尔特算法,以及使用G2O、Ceres库进行实际操作和Ceres库的配置实例。遇到的编译问题与解决方案也分享在内。
本文探讨了非线性优化中的状态估计、最小二乘方法和曲线拟合技术,包括批量状态估计、高斯牛顿法、列文伯格-马夸尔特算法,以及使用G2O、Ceres库进行实际操作和Ceres库的配置实例。遇到的编译问题与解决方案也分享在内。
文章目录
6 非线性优化
g2o库学习
非线性优化_曲线拟合_g2o图优化_最小二乘优化示例
ceres库学习
Ceres Solver 官方教程学习笔记(一)
6.1状态估计问题
6.1.1批量状态估计与最大后验估计
6.1.2 最小二乘的引出
6.1.3 例子:批量状态估计
6.2非线性最小二乘
6.2.1 一阶和二阶梯度法
6.2.2 高斯牛顿法
6.2.3 列文伯格—马夸尔特方法
理论部分不进行内容搬运:可参考博客: 视觉SLAM十四讲-第六讲笔记
理论部分小结
一个良好的初值对最优化问题非常重要!,*系数矩阵是稀疏的.*此类算法得以实时性地实现.
在本节遇到了一个一直难以解决的bug:
/usr/local/include/g2o/core/base_fixed_sized_edge.hpp:179:14: error: ‘FixedArray {
aka class ceres::internal::FixedArray<double, 3>}’ has no member named ‘fill’
add_vertex.fill(0.);
~~~~~~~~~~~^~~~
/usr/local/include/g2o/core/base_fixed_sized_edge.hpp:186:30: error: ‘FixedArray {
aka class ceres::internal::FixedArray<double, 3>}’ has no member named ‘data’
vertex->oplus(add_vertex.data());
~~~~~~~~~~~^~~~
/usr/local/include/g2o/core/base_fixed_sized_edge.hpp:192:30: error: ‘FixedArray {
aka class ceres::internal::FixedArray<double, 3>}’ has no member named ‘data’
vertex->oplus(add_vertex.data());
~~~~~~~~~~~^~~~
CMakeFiles/g2oCurveFitting.dir/build.make:75: recipe for target 'CMakeFiles/g2oCurveFitting.dir/g2oCurveFitting.cpp.o' failed
make[2]: *** [CMakeFiles/g2oCurveFitting.dir/g2oCurveFitting.cpp.o] Error 1
CMakeFiles/Makefile2:138: recipe for target 'CMakeFiles/g2oCurveFitting.dir/all' failed
make[1]: *** [CMakeFiles/g2oCurveFitting.dir/all] Error 2
Makefile:90: recipe for target 'all' failed
make: *** [all] Error 2
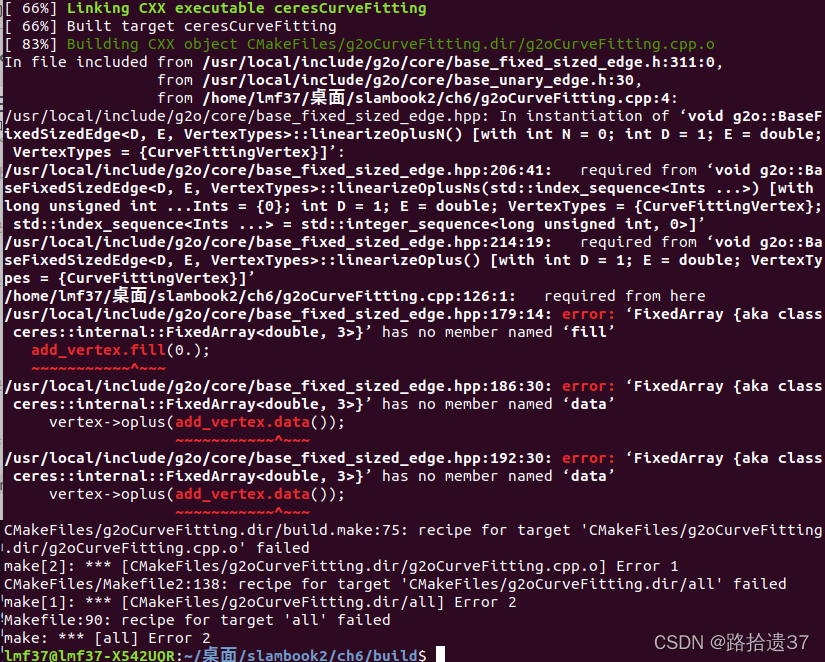
解决方法具体见博客记录:
视觉SLAM十四讲学习笔记—ch6 关于bug aka class ceres::internal::FixedArray<double, 3>}’ has no member named
6.3 实践:曲线拟合问题
6.3.1 手写高斯牛顿法
编译运行代码结果如下:

代码及注释如下:
#include <iostream>
#include <chrono>
#include <opencv2/opencv.hpp>
#include <Eigen/Core>
#include <Eigen/Dense>
using namespace std;
using namespace Eigen;
int main(int argc, char **argv) {
double ar = 1.0, br = 2.0, cr = 1.0; // 真实参数值
double ae = 2.0, be = -1.0, ce = 5.0; // 估计参数值
int N = 100; // 数据点
double w_sigma = 1.0; // 噪声Sigma值
double inv_sigma = 1.0 / w_sigma;
cv::RNG rng; // OpenCV随机数产生器
vector<double> x_data, y_data; // 数据
for (int i =  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1163
1163

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









