







一、SVPWM
交流电机需要输入三相正弦电流,最终目的是在电机空间形成圆形磁场,从而产生恒定的电磁转矩。为了控制逆变器的工作,我们可以将逆变器和交流电机视为一个整体,以圆形旋转磁场为目标,这种控制方法称为“磁链跟踪控制”。磁链轨迹的控制是通过交替使用不同的电压空间矢量来实现的,因此又称为“电压空间矢量PWM控制”,即SVPWM。通过磁链跟踪控制,我们可以精确地控制交流电机的转速和转矩,从而实现精确的控制和调节。同时,SVPWM控制也可以提高交流电机的效率,减少电机的功耗和发热量,从而延长电机的使用寿命。
与SPWM控制相比,SVPWM具有更高的电压利用率,其输出电压最高可提高15%左右。这一优势使得SVPWM在需要高效率、高电压输出的场合中更具优势。在SPWM控制中,电压利用率受到一定的限制,因为SPWM是基于正弦波和三角波的交点来生成PWM波形的。这种生成方式导致SPWM的输出电压在一定范围内波动,且无法充分利用全部电压范围。而SVPWM则通过改变电压矢量的方向来实现更高的电压利用率。它利用空间矢量调制技术,将多个电压矢量组合起来,以生成所需的PWM波形。这种调制方式使得SVPWM能够更精确地控制输出电压和电流,从而提高系统的效率。
因此,在需要高效率、高电压输出的应用中,如电力转换、电机驱动等,SVPWM控制往往比SPWM控制更受欢迎。通过优化电压利用率,SVPWM能够在保证系统性能的同时,降低功耗和发热量,提高系统的可靠性和稳定性。
二、永磁同步电机恒压频比开环控制系统Matlab/Simulink仿真分析
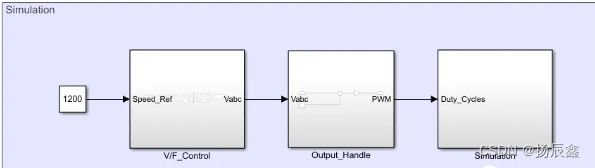
永磁同步电机恒压频比开环控制系统Matlab/Simulink仿真框图如下:
2.1.仿真电路分析
2.1.1.恒压频比控制算法
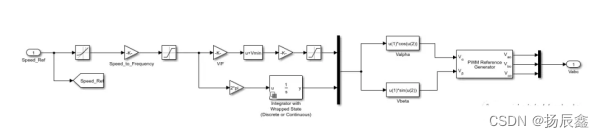
在αβ坐标系下,电压的控制是电机控制中的关键步骤。通常,我们会将电压经过反Clark变换生成输入到电机的三相电压,以实现SPWM(正弦波脉宽调制)控制。然而,在这里我们并没有采用这种方法,而是生成了马鞍波来实现SVPWM(空间矢量脉宽调制)控制。
SVPWM控制是一种更为精确的控制方法,它能够提供更高的电压利用率和更好的电机性能。通过生成马鞍波,我们可以实现更精确的控制和更高的效率。
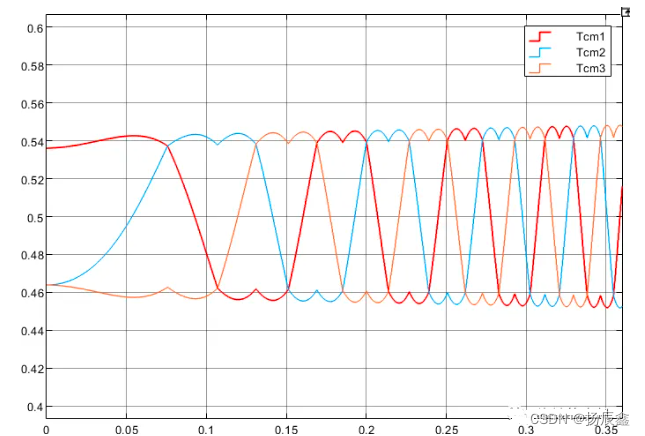
目标转速1200r/min时的SVPWM波形如下所示:

2.1.2.输出处理
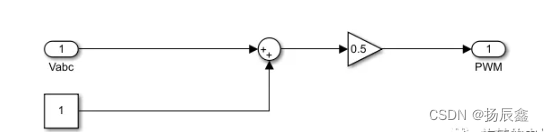
此处作了一个归一化处理,使SVPWM输出的波形在[0 1]区间内。
2.1.3.主电路

主电路为三相逆变电路与永磁同步电机,设置同上一章节。
2.2.仿真结果分析
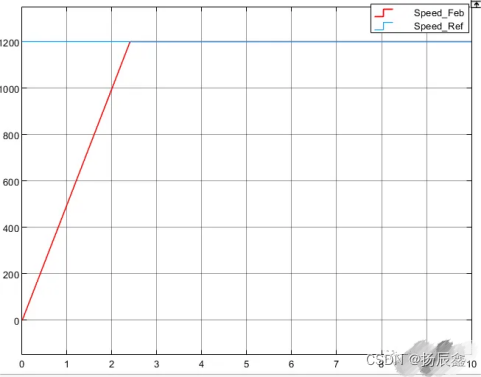
2.2.1.设定目标转速为1200r/min
目标转速与实际转速的波形曲线:
稳态时,目标转速与实际转速的误差:

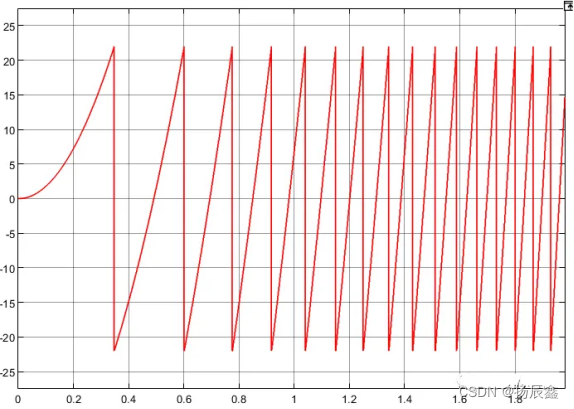
电机转子位置:
dq坐标系下的定子电流值:

电磁转矩:

2.2.1.设定目标转速为变化值
目标转速:
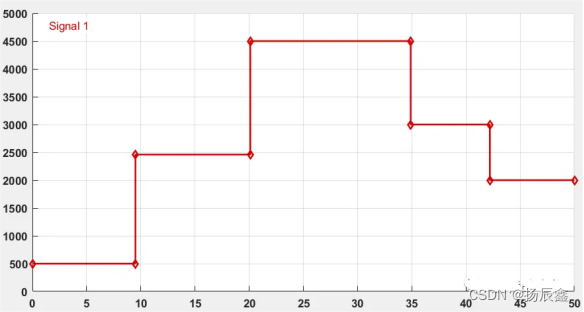
目标转速与实际转速:

















 421
421

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











