








 超级会员免费看
超级会员免费看

 本文探讨了雷达系统中的相位补偿概念,主要围绕基于多普勒相位补偿的速度扩展方法和DBF测角两方面展开。通过举例阐述相位补偿的必要性和方法,特别是在速度模糊时如何通过假设来确定正确的相位补偿值。相位补偿在解决速度扩展和测角问题中起着关键作用,其核心是对目标产生的相偏值进行精确估计和补偿。
本文探讨了雷达系统中的相位补偿概念,主要围绕基于多普勒相位补偿的速度扩展方法和DBF测角两方面展开。通过举例阐述相位补偿的必要性和方法,特别是在速度模糊时如何通过假设来确定正确的相位补偿值。相位补偿在解决速度扩展和测角问题中起着关键作用,其核心是对目标产生的相偏值进行精确估计和补偿。
以两个问题为例展开,分别是基于多普勒相位补偿的速度扩展方法(记为问题1)和DBF测角(记为问题2),两者本质上都是对相位进行补偿。为什么这么说呢?听我细细到来。
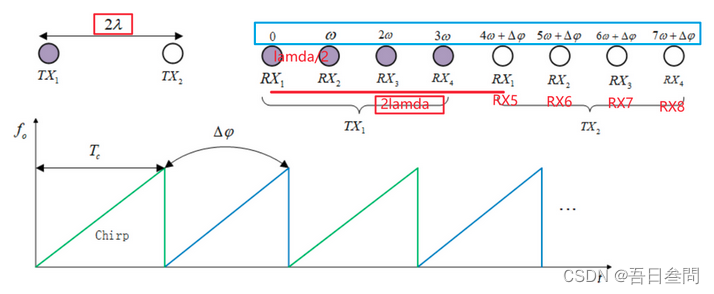
如图,问题1的关键就是要去补偿掉TX2对应的接收天线RX5~RX8中的delta_phase,造成这个相位差的原因是TX2在发射时间上落后TX1,那我们只要把这个多出来的相位减掉就可以了,也称之为相位补偿。
以2T4R为例,只有TX2对应的接收天线的相位需要补偿,TX1对应的接收天线并不需要。结合下面的代码看:当tx=1时,等式右边等于0,即不需要补偿;当tx=2时,这时候与发射天线TX2对应的接收天线都需要进行相位补偿。
phi = 2*pi*fd*Tc;
for tx = 1:TxNum
for rx = 1:RxNum
coeff((tx-1)*RxNum+rx) = exp(-j*phi*(tx-1));
end
end
这里存在一个问题,想知道需要补偿的相位值是多少,那首先要知道目标的速

 订阅专栏 解锁全文
订阅专栏 解锁全文




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











