







 本文详细解析锯齿波FMCW雷达的中频信号表达式,阐述其测距测速原理,包括距离速度耦合现象及解决方法。通过2D-FFT处理,实现目标距离与速度的精确测量。
本文详细解析锯齿波FMCW雷达的中频信号表达式,阐述其测距测速原理,包括距离速度耦合现象及解决方法。通过2D-FFT处理,实现目标距离与速度的精确测量。
对锯齿波FMCW中频(差拍)信号的推导见上一篇文章锯齿波调制的FMCW雷达中频回波信号的公式推导,在这里直接给出结论。
中频信号的表达式为:

中频信号的瞬时频率表达式为:
![]()

从上面的结果可以得到如下的结论:
- 从表达式(2)中可以看出,中频信号的回波信号依然是一个线性调频连续波;
- 从表达式(3)中可以看出,
 的表达式中既包含距离信息,也包含速度信息,通过求得的距离存在着误差,这就是距离速度耦合现象。当目标的运动速度很大时,耦合想象就会更严重,对测距造成的误差就会越大。通常采用的方法就是速度补偿,就是先将目标的径向速度
的表达式中既包含距离信息,也包含速度信息,通过求得的距离存在着误差,这就是距离速度耦合现象。当目标的运动速度很大时,耦合想象就会更严重,对测距造成的误差就会越大。通常采用的方法就是速度补偿,就是先将目标的径向速度 求出来,再去进一步修正距离值。还有一种方法及时采用Chirp Sequence的发射波形,这种波形的调频周期很短,可以近似忽略物体在这段时间的运动速度对测距造成的影响。
求出来,再去进一步修正距离值。还有一种方法及时采用Chirp Sequence的发射波形,这种波形的调频周期很短,可以近似忽略物体在这段时间的运动速度对测距造成的影响。 - 测距的本质:测距的本质就是计算延时(对于静止的目标而言,延时就是
 ),而延时与差拍频率成线性关系,所以通过计算差拍频率可以计算回波延时,进而计算出目标的距离。
),而延时与差拍频率成线性关系,所以通过计算差拍频率可以计算回波延时,进而计算出目标的距离。
Q&A:
- 经过2D-FFT之后,得到距离速度谱,通过峰值搜索找到对应的目标。每个峰值点对应着一个坐标

 ,每个坐标分别对应着一个频率
,每个坐标分别对应着一个频率 ,频率对应着
,频率对应着 。说白了就是峰值对应的坐标值分别乘以距离分辨率和速度分辨率就能够得到对应的距离和速度。这就是我们为什么通过2D-FFT求频率的原因。因为有了频率,我们就能知道距离和速度信息了。我觉得最最本质的原因是线性调频连续波测速测距都是基于频率的。但是像MFSK,它的测速是基于频率的,但是测速是基于相位的。
。说白了就是峰值对应的坐标值分别乘以距离分辨率和速度分辨率就能够得到对应的距离和速度。这就是我们为什么通过2D-FFT求频率的原因。因为有了频率,我们就能知道距离和速度信息了。我觉得最最本质的原因是线性调频连续波测速测距都是基于频率的。但是像MFSK,它的测速是基于频率的,但是测速是基于相位的。 - 锯齿波FMCW测距测速需要经过2D-FFT,三角波FMCW可以通过一次FFT无模糊的测距和测速。那你可能会问,为啥不采用三角波呢?其实这两种方法各有优缺点。对于锯齿波FMCW来说,雷达波形的产生相对简单,但是后端的信号处理比较复杂,还会存在速度模糊,需要进行速度解模糊。对于三角波FMCW来说,信号处理简单,但是在多目标的情况下,存在多目标配对的问题。
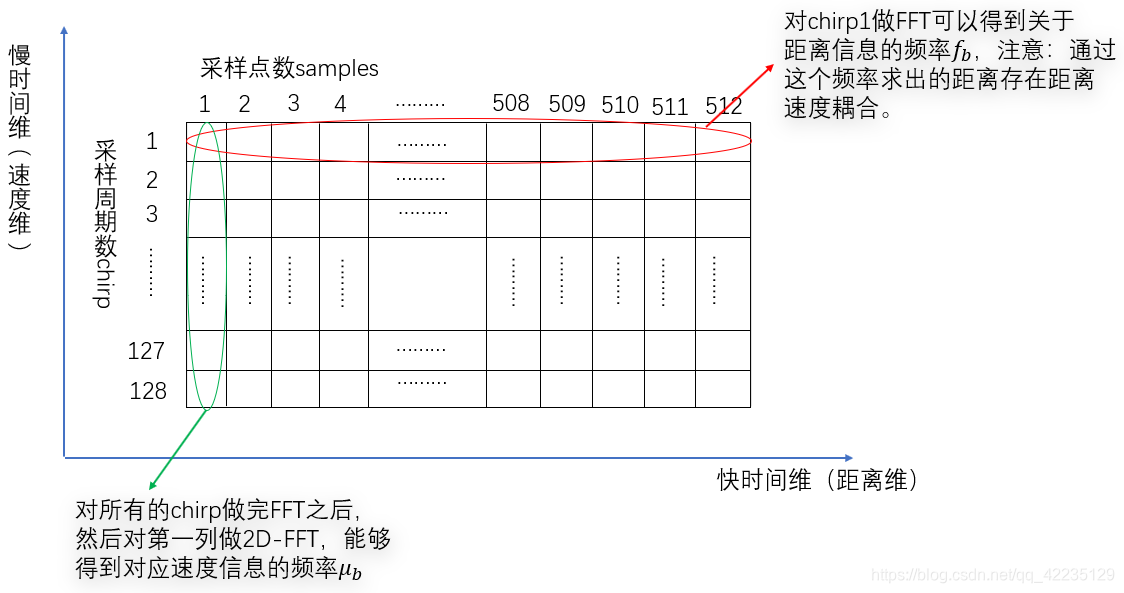
- 锯齿波FMCW二维FFT的处理过程(假设发射信号是128chirp * 512 samples)
简易MATLAB仿真代码如下:
close all;clc
%% 发射波形参数设置
c=3e8;%光速
f=77e9;%中心频率
lamda=c/f;%波长
d=lamda/2;%天线间距
B=700e6;%信号带宽700MHz
T=40e-6;%调制周期40us
Slope=B/T;%调制斜率17.5e12
M=128;%采样周期
N=512;%采样点数
dt=T/N;%采样间隔
fs=1/dt;%采样频率为12.8MHz
nFrame=100;%100帧数据
%% 指标参数
Rmax=fs*c/(2*Slope);%最大作用距离109.71m
Rres=c/(2*B);%距离分辨率为0.214m
Vmax=lamda/(4*T);%最大无模糊速度24.3506m/s 或者是lamda/(4*T*Ntx)?
Vres=lamda/(2*M*T);%速度分辨率
%% 单个目标回波生成
% R=100;
% V=15 ;%54km/h
% S1 = zeros(M,N);
% for i = 1:M %生成nFrame*M个chirp
% fb = Slope*2*R/c+2*V/lamda;
% Sb = Slope*2*V/c;
% k = 1 : N;
% y1 = 0.5*exp(1j*2*pi*fb*k*dt + 1j*2*pi*Sb*(k*dt).^2 + 1j*2*pi*2*(V/lamda)*i*T);
% S1(i,:)=y1;
% end
% m = 1:1:N;
% fm = Rres*(m-1);
% res_1 = abs(fft(S1(1,:)));
% figure
% plot(fm,res_1);
% title('无干扰,目标速度=15m/s')
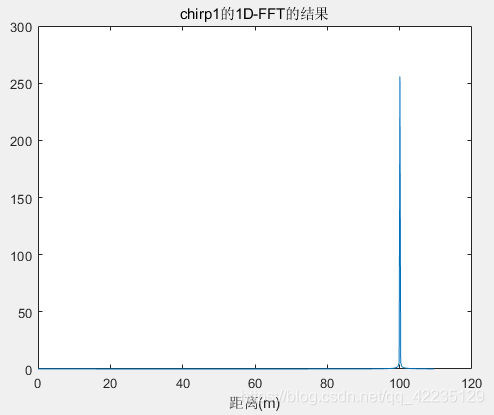
% xlabel('range-m')结果:在100m处有一个目标。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











