






1.从泰勒展开到勒让德再到球谐函数
1.1引力位的泰勒级数表达
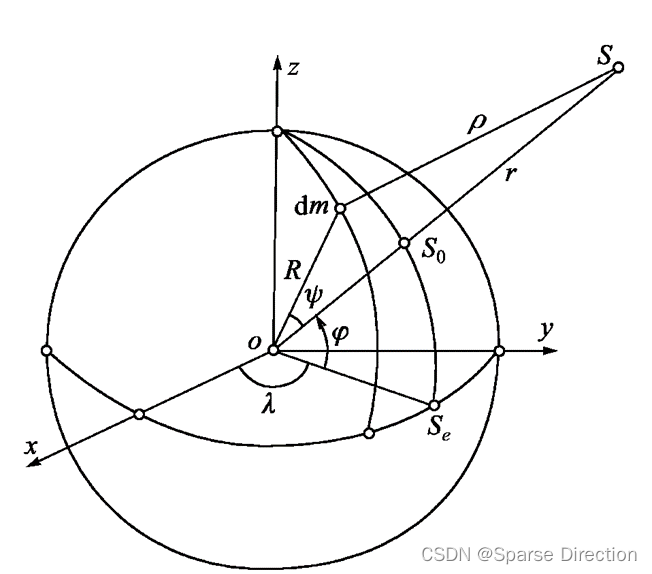
引力位表达式为
V
=
G
∫
M
1
ρ
d
m
V = G \int _ { M } \frac { 1 } { \rho } d m
V=G∫Mρ1dm
其中
ρ
2
=
r
2
+
R
2
−
2
R
r
cos
ψ
=
r
2
(
1
+
(
R
r
)
2
−
2
R
r
cos
ψ
)
\rho ^ { 2 } = r ^ { 2 } + R ^ { 2 } - 2 R r \cos \psi = r ^ { 2 } ( 1 + ( \frac { R } { r } ) ^ { 2 } - 2 \frac { R } { r } \cos \psi )
ρ2=r2+R2−2Rrcosψ=r2(1+(rR)2−2rRcosψ)
令
l
=
(
R
r
)
2
−
2
R
r
cos
ψ
l = ( \frac { R } { r } ) ^ { 2 } - 2 \frac { R } { r } \cos \psi
l=(rR)2−2rRcosψ
则原来的距离倒数为
1
ρ
=
1
r
(
1
+
l
)
−
1
2
\frac { 1 } { \rho } = \frac { 1 } { r } ( 1 + l ) ^ { - \frac { 1 } { 2 } }
ρ1=r1(1+l)−21
对其进行泰勒展开
f
(
x
)
=
f
(
x
0
)
0
!
+
f
′
(
x
0
)
1
!
(
x
−
x
0
)
+
f
′
′
(
x
0
)
2
!
(
x
−
x
0
)
2
+
⋯
+
f
(
n
)
(
x
0
)
n
!
(
x
−
x
0
)
n
+
R
n
(
x
)
{ f ( x ) } = \frac { f ( x _ { 0 } ) } { 0 ! } + \frac { f ^ { \prime } ( x _ { 0 } ) } { 1 ! } ( x - x _ { 0 } ) + \frac { f ^ { \prime \prime } ( x _ { 0 } ) } { 2 ! } ( x - x _ { 0 } ) ^ { 2 } + \cdots +\frac { f ^ { ( n ) } ( x _ { 0 } ) } { n ! } ( x - x _ { 0 } ) ^ { n }+R_n(x)
f(x)=0!f(x0)+1!f′(x0)(x−x0)+2!f′′(x0)(x−x0)2+⋯+n!f(n)(x0)(x−x0)n+Rn(x)
将
1
ρ
\frac{1}{\rho}
ρ1在
l
=
0
l=0
l=0处展开得到
1
ρ
=
1
r
(
1
+
l
)
−
1
2
=
1
r
(
1
−
1
2
l
+
3
8
l
2
−
5
16
l
3
+
⋯
)
\frac { 1 } { \rho } = \frac { 1 } { r } ( 1 + l ) ^ { - \frac { 1 } { 2 } } = \frac { 1 } { r } ( 1 - \frac { 1 } { 2 } l + \frac { 3 } { 8 } l ^ { 2 } - \frac { 5 } { 1 6 } l ^ { 3 } + \cdots )
ρ1=r1(1+l)−21=r1(1−21l+83l2−165l3+⋯)
引力位级数表达为
V
=
G
r
∫
(
1
−
1
2
l
+
3
8
l
2
−
5
16
l
3
+
⋯
)
d
m
V = \frac { G } { r } \int ( 1 - \frac { 1 } { 2 } l + \frac { 3 } { 8 } l ^ { 2 } - \frac { 5 } { 1 6 } l ^ { 3 } + \cdots ) d m
V=rG∫(1−21l+83l2−165l3+⋯)dm
将
l
l
l表达式代入得
V
=
G
r
∫
(
1
−
1
2
[
(
R
r
)
2
−
2
R
r
cos
ψ
]
+
3
8
[
(
R
r
)
2
−
2
R
r
cos
ψ
]
2
−
5
16
[
(
R
r
)
2
−
2
R
r
cos
ψ
]
3
+
⋯
)
d
m
V= \frac { G } { r } \int ( 1 - \frac { 1 } { 2 } \left[ ( \frac { R } { r } ) ^ { 2 } - 2 \frac { R } { r } \cos \psi \right] + \frac { 3 } { 8 } \left[ ( \frac { R } { r } ) ^ { 2 } - 2 \frac { R } { r } \cos \psi \right] ^ { 2 }- \frac { 5 } { 1 6 } \left[ ( \frac { R } { r } ) ^ { 2 } - 2 \frac { R } { r } \cos \psi \right] ^ { 3 } + \cdots ) d m
V=rG∫(1−21[(rR)2−2rRcosψ]+83[(rR)2−2rRcosψ]2−165[(rR)2−2rRcosψ]3+⋯)dm
1.2 泰勒级数到勒让德多项式
按照
R
r
\frac{R}{r}
rR整理得
V
=
v
0
+
v
1
+
v
2
+
v
3
+
⋯
=
∑
i
=
0
n
v
i
V = v _ { 0 } + v _ { 1 } + v _ { 2 } + v _ { 3 } + \cdots = \sum _ { i = 0 } ^ { n } v _ { i }
V=v0+v1+v2+v3+⋯=i=0∑nvi
其中
v
0
=
G
r
∫
M
d
m
v _ { 0 } = \frac { G } { r } \int _ { M } d m
v0=rG∫Mdm
v
1
=
G
r
∫
M
R
r
cos
ψ
d
m
v _ { 1 } = \frac { G } { r } \int _ { M } \frac { R } { r } \cos \psi d m
v1=rG∫MrRcosψdm
v
2
=
G
r
∫
M
(
R
r
)
2
(
3
2
cos
2
ψ
−
1
2
)
d
m
v _ { 2 } = \frac { G } { r } \int _ { M } ( \frac { R } { r } ) ^ { 2 } ( \frac { 3 } { 2 } \cos ^ { 2 } \psi - \frac { 1 } { 2 } ) d m
v2=rG∫M(rR)2(23cos2ψ−21)dm
当然,零阶项、一阶项、二阶项等的表达都有其实际的物理意义,此处暂不作展开。进行代换有
P
0
(
cos
ψ
)
=
1
P _ { 0 } ( \cos \psi ) = 1
P0(cosψ)=1
P
1
(
cos
ψ
)
=
cos
ψ
P _ { 1 } ( \cos \psi ) = \cos \psi
P1(cosψ)=cosψ
P
2
(
cos
ψ
)
=
3
2
cos
2
ψ
−
1
2
P _ { 2 } ( \cos \psi ) = \frac { 3 } { 2 } \cos ^ { 2 } \psi - \frac { 1 } { 2 }
P2(cosψ)=23cos2ψ−21
于是就有(类似)勒让德表达。直接给出
P
n
(
cos
ψ
)
P _ { n } ( \cos \psi )
Pn(cosψ)一般表达式
P
n
(
cos
ψ
)
=
1
2
n
n
!
d
n
(
cos
2
ψ
−
1
)
n
d
(
cos
ψ
)
n
P _ { n } ( \cos \psi ) = \frac { 1 } { 2 ^ { n } n ! } \frac { d ^ { n } ( \cos ^ { 2 } \psi - 1 ) ^ { n } } { d ( \cos \psi ) ^ { n } }
Pn(cosψ)=2nn!1d(cosψ)ndn(cos2ψ−1)n
当已知一阶项和二阶项时,有递推式
P
n
+
1
(
x
)
=
2
n
+
1
n
+
1
x
P
n
(
x
)
−
n
n
+
1
P
n
−
1
(
x
)
,
x
=
cos
ψ
P _ { n + 1 } ( x ) = \frac { 2 n + 1 } { n + 1 } x P _ { n } ( x ) - \frac { n } { n + 1 } P _ { n - 1 } ( x ),x = \cos \psi
Pn+1(x)=n+12n+1xPn(x)−n+1nPn−1(x),x=cosψ
于是,用勒让德公式表示第
n
\bm n
n阶地球引力位公式为
V
n
=
G
r
∫
(
R
r
)
n
P
n
(
cos
ψ
)
d
m
V _ { n } = \frac { G } { r } \int ( \frac { R } { r } ) ^ { n } P _ { n } ( \cos \psi ) d m
Vn=rG∫(rR)nPn(cosψ)dm
1.3 勒让德多项式到缔合勒让德和球谐函数
由于
ψ
\psi
ψ角余弦是M点和S点的直角坐标的函数。也可以用球面三角学公式表示为两点的球面坐标函数,经过变换之后,即可得到
n
n
n阶重力位的计算公式
V
n
=
1
r
n
+
1
[
A
n
P
n
(
cos
θ
)
+
∑
K
=
1
n
(
A
n
K
cos
K
λ
+
B
n
K
sin
K
λ
)
P
n
K
(
cos
θ
)
]
V _ { n } = \frac { 1 } { r ^ { n + 1 } } \left[ A _ { n } P _ { n } ( \cos \theta ) + \sum _ { K = 1 } ^ { n } ( A _ { n } ^ { K } \cos K \lambda + B _ { n } ^ { K } \sin K \lambda ) P _ { n } ^ { K } ( \cos \theta ) \right]
Vn=rn+11[AnPn(cosθ)+K=1∑n(AnKcosKλ+BnKsinKλ)PnK(cosθ)]
其中,
θ
\theta
θ为极距,
ϕ
+
θ
=
90
°
\phi+\theta=90\degree
ϕ+θ=90°,
P
n
(
cos
θ
)
P_n(\cos\theta)
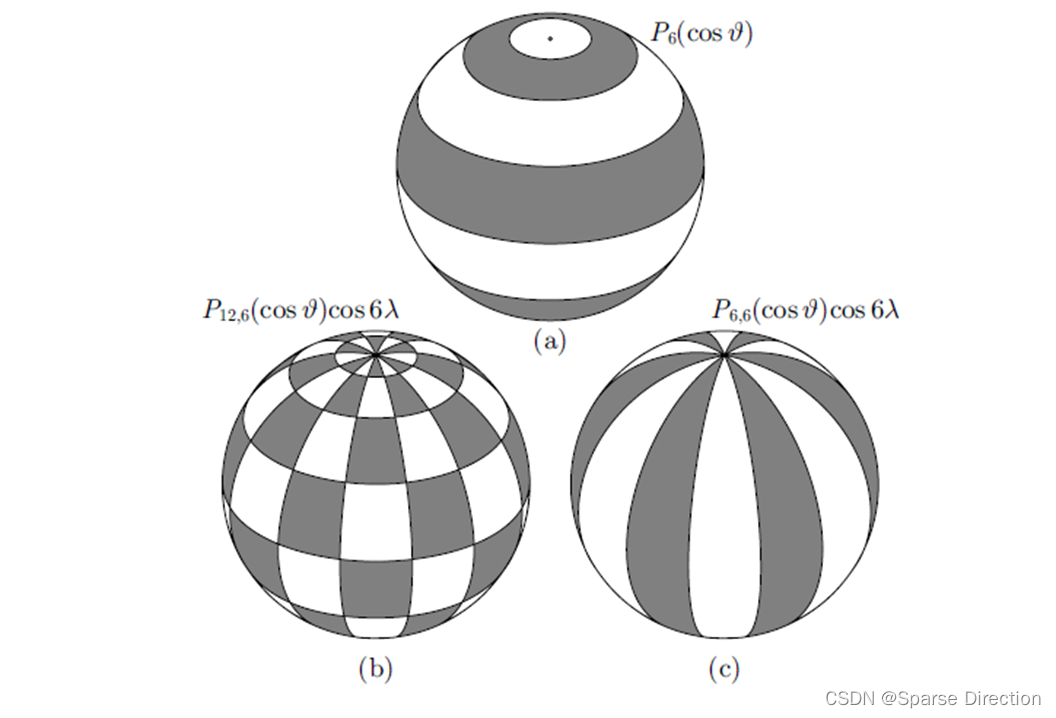
Pn(cosθ)称为带球函数,
P
n
K
(
cos
θ
)
P_n^K(\cos\theta)
PnK(cosθ)称为缔合勒让德函数。
V
=
∑
n
=
0
∞
V
n
=
∑
n
=
0
∞
1
r
n
+
1
[
A
n
P
n
(
cos
θ
)
+
∑
K
=
1
n
(
A
n
K
cos
K
λ
+
B
n
K
sin
K
λ
)
P
n
K
(
cos
θ
)
]
V = \sum _ { n = 0 } ^ { \infty } V _ { n } = \sum _ { n = 0 } ^ { \infty } \frac { 1 } { r ^ { n + 1 } } \left[ A _ { n } P _ { n } ( \cos \theta ) + \sum _ { K = 1 } ^ { n } ( A _ { n } ^ { K } \cos K \lambda + B _ { n } ^ { K } \sin K \lambda ) P _ { n } ^ { K } ( \cos \theta ) \right]
V=n=0∑∞Vn=n=0∑∞rn+11[AnPn(cosθ)+K=1∑n(AnKcosKλ+BnKsinKλ)PnK(cosθ)]
其中,
cos
K
λ
P
n
K
(
cos
θ
)
\cos K\lambda P_n^K(\cos\theta)
cosKλPnK(cosθ)和
sin
K
λ
P
n
K
(
cos
θ
)
\sin K\lambda P_n^K(\cos\theta)
sinKλPnK(cosθ)称为缔合球函数。
K
=
n
K=n
K=n时称扇球函数,
K
≠
n
K \neq n
K=n时称田球函数
2.低阶项的物理意义
2.1零阶项
v
0
=
G
r
∫
M
d
m
=
G
M
r
v _ { 0 } = \frac { G } { r } \int _ { M } d m = \frac { G M } { r }
v0=rG∫Mdm=rGM
解释和应用:
v
0
v_0
v0就是把地球质量集中到地球质心处时的点的位。也就是说, 将地球看作为一个质点时,与其距离为𝑟点处的引力位为
v
0
v_0
v0。
2.2一阶项
cos
ψ
=
R
⋅
r
R
r
=
x
x
m
+
y
y
m
+
z
z
m
R
r
\cos \psi = \frac { \bm R \cdot \bm r } { R r } = \frac { x x _ { m } + y y _ { m } + z z _ { m } } { R r }
cosψ=RrR⋅r=Rrxxm+yym+zzm
v
1
=
G
r
∫
M
R
r
cos
ψ
d
m
=
G
r
∫
M
R
r
x
x
m
+
y
y
m
+
z
z
m
R
r
d
m
=
G
r
3
∫
M
(
x
x
m
+
y
y
m
+
z
z
m
)
d
m
v _ { 1 } = \frac { G } { r } \int _ { M } \frac { R } { r } \cos \psi d m = \frac { G } { r } \int _ { M } ^ { }\frac{R}{r} \frac { x x _ { m } + y y _ { m } + z z _ { m } } { R r } d m = \frac { G } { r ^ { 3 } } \int _ { M } ( x x _ { m } + y y _ { m } + z z _ { m } ) d m
v1=rG∫MrRcosψdm=rG∫MrRRrxxm+yym+zzmdm=r3G∫M(xxm+yym+zzm)dm
=
G
r
3
(
∫
M
x
x
m
d
m
+
∫
M
y
y
m
d
m
+
∫
M
z
z
m
d
m
)
= \frac { G } { r ^ { 3 } } ( \int _ { M } ^ { } x x _ { m } d m + \int _ { M } ^ { } y y _ { m } d m + \int _ { M } ^ { } z z _ { m } d m )
=r3G(∫Mxxmdm+∫Myymdm+∫Mzzmdm)
物质质心坐标定义为
x
0
=
∫
M
x
m
d
m
M
,
y
0
=
∫
M
y
m
d
m
M
,
z
0
=
∫
M
z
m
d
m
M
x _ { 0 } = \frac { \int _ { M } ^ {} x _ { m } d m } { M } , y _ { 0 } = \frac { \int _ { M } ^ {} y _ { m } d m } { M } , z _ { 0 } = \frac { \int _ { M } ^ {} z _ { m } d m } { M }
x0=M∫Mxmdm,y0=M∫Mymdm,z0=M∫Mzmdm
因为坐标原点置于地球的质心,所以
v
1
=
0
v _ { 1 } = 0
v1=0
解释和应用: 卫星的三维位置
(
x
,
y
,
z
)
(x,y,z)
(x,y,z)是在地心坐标系下给出的。若卫星反演出的地球重力场的一阶项
v
1
≠
0
v _ { 1 } \neq 0
v1=0,那么,则意味着所用的三维坐标系的原点不在地球质量中心,坐标系的原点需要重新进行标定。卫星在大气层外飞行,所以根据其确定的地球质心位置,是包含整个大气、海洋在内的地心位置。
2.3二阶项
v
2
=
G
r
∫
M
(
R
r
)
2
(
3
2
cos
2
ψ
−
1
2
)
d
m
v _ { 2 } = \frac { G } { r } \int _ { M } ( \frac { R } { r } ) ^ { 2 } ( \frac { 3 } { 2 } \cos ^ { 2 } \psi - \frac { 1 } { 2 } ) d m
v2=rG∫M(rR)2(23cos2ψ−21)dm
R
2
=
x
m
2
+
y
m
2
+
z
m
2
R ^ { 2 } = x _ { m } ^ { 2 } + y _ { m } ^ { 2 } + z _ { m } ^ { 2 }
R2=xm2+ym2+zm2
cos
ψ
=
R
⋅
r
R
r
=
x
x
m
+
y
y
m
+
z
z
m
R
r
\cos \psi = \frac { \bm R \cdot \bm r } { R r } = \frac { x x _ { m } + y y _ { m } + z z _ { m } } { R r }
cosψ=RrR⋅r=Rrxxm+yym+zzm
替换可得
v
2
=
G
r
∫
M
(
R
r
)
2
(
3
2
(
x
x
m
+
y
y
m
+
z
z
m
R
r
)
2
−
1
2
)
d
m
v _ { 2 } = \frac { G } { r } \int _ { M } ( \frac { R } { r } ) ^ { 2 } ( \frac { 3 } { 2 } ( \frac { x x _ { m } + y y _ { m } + z z _ { m } } { R r } ) ^ { 2 } - \frac { 1 } { 2 } ) d m
v2=rG∫M(rR)2(23(Rrxxm+yym+zzm)2−21)dm
v
2
=
f
2
r
5
[
(
y
2
+
z
2
−
2
x
2
)
A
+
(
x
2
+
z
2
−
2
y
2
)
B
+
(
x
2
+
y
2
−
2
z
2
)
C
+
6
y
z
D
+
6
x
z
E
+
6
x
y
F
]
v _ { 2 } = \frac { f } { 2 r ^ { 5 } } \left[ ( y ^ { 2 } + z ^ { 2 } - 2 x ^ { 2 } ) A + ( x ^ { 2 } + z ^ { 2 } - 2 y ^ { 2 } ) B +( x ^ { 2 } + y ^ { 2 } - 2 z ^ { 2 } ) C + 6 y z D + 6 x z E + 6 x y F \right]
v2=2r5f[(y2+z2−2x2)A+(x2+z2−2y2)B+(x2+y2−2z2)C+6yzD+6xzE+6xyF]
其中相关的符号说明:质点M对坐标轴的转动惯量
A
=
∫
M
(
y
m
2
+
z
m
2
)
d
m
B
=
∫
M
(
x
m
2
+
z
m
2
)
d
m
C
=
∫
M
(
x
m
2
+
y
m
2
)
d
m
A = \int _ { M } ( y _ { m } ^ { 2 } + z _ { m } ^ { 2 } ) d m \quad B= \int _ { M } ( x _ { m } ^ { 2 } + z _ { m } ^ { 2 } ) d m \quad C = \int _ { M } ( x _ { m } ^ { 2 } + y _ { m } ^ { 2 } ) d m
A=∫M(ym2+zm2)dmB=∫M(xm2+zm2)dmC=∫M(xm2+ym2)dm
离心力矩
D
=
∫
M
(
y
m
z
m
)
d
m
E
=
∫
M
(
x
m
z
m
)
d
m
F
=
∫
M
(
x
m
y
m
)
d
m
D = \int _ { M } ( y _ { m } z _ { m } ) d m \quad E = \int_ { M } ( x _ { m } z _ { m } ) d m \quad F = \int_ { M } ( x _ { m } y _ { m } ) d m
D=∫M(ymzm)dmE=∫M(xmzm)dmF=∫M(xmym)dm
化成球坐标系,S的极坐标系为
x
=
r
.
cos
φ
cos
λ
y
=
r
.
cos
φ
sin
λ
z
=
r
.
sin
φ
\begin{matrix} x = r . \cos \varphi \cos \lambda \\ y = r . \cos \varphi \sin \lambda \\ z = r . \sin \varphi \end{matrix}
x=r.cosφcosλy=r.cosφsinλz=r.sinφ
于是
v
2
=
G
r
3
[
2
C
−
A
−
B
2
(
1
2
−
3
2
sin
2
φ
)
+
3
(
E
cos
λ
+
D
sin
λ
)
cos
φ
sin
φ
+
3
2
(
B
−
A
2
cos
2
λ
+
F
sin
2
λ
)
cos
2
φ
]
v_2= \frac { G } { r ^ { 3 } } \left[ \frac { 2 C - A - B } { 2 } ( \frac { 1 } { 2 } - \frac { 3 } { 2 } \sin ^ { 2 } \varphi ) + 3 ( E \cos \lambda + D \sin \lambda ) \cos \varphi \sin \varphi + \frac { 3 } { 2 } ( \frac { B - A } { 2 } \cos 2 \lambda + F \sin 2 \lambda ) \cos ^ { 2 } \varphi \right]
v2=r3G[22C−A−B(21−23sin2φ)+3(Ecosλ+Dsinλ)cosφsinφ+23(2B−Acos2λ+Fsin2λ)cos2φ]
v
2
=
G
r
3
[
2
C
−
A
−
B
2
(
1
2
−
3
2
sin
2
φ
)
+
3
2
(
B
−
A
2
cos
2
λ
cos
2
φ
)
+
3
(
E
cos
λ
+
D
sin
λ
)
cos
φ
sin
φ
+
3
2
F
sin
2
λ
cos
2
φ
]
v_2= \frac { G } { r ^ { 3 } } \left[ \frac { 2 C - A - B } { 2 } ( \frac { 1 } { 2 } - \frac { 3 } { 2 } \sin ^ { 2 } \varphi ) + \frac { 3 } { 2 } ( \frac { B - A } { 2 } \cos 2 \lambda \cos ^ { 2 } \varphi ) + 3 ( E \cos \lambda + D \sin \lambda ) \cos \varphi \sin \varphi + \frac { 3 } { 2 } F \sin 2 \lambda \cos ^ { 2 } \varphi \right]
v2=r3G[22C−A−B(21−23sin2φ)+23(2B−Acos2λcos2φ)+3(Ecosλ+Dsinλ)cosφsinφ+23Fsin2λcos2φ]
解释和应用: 引力位的二阶球谐系数与地球的扁率和极潮变化直接相关















 429
429

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









