






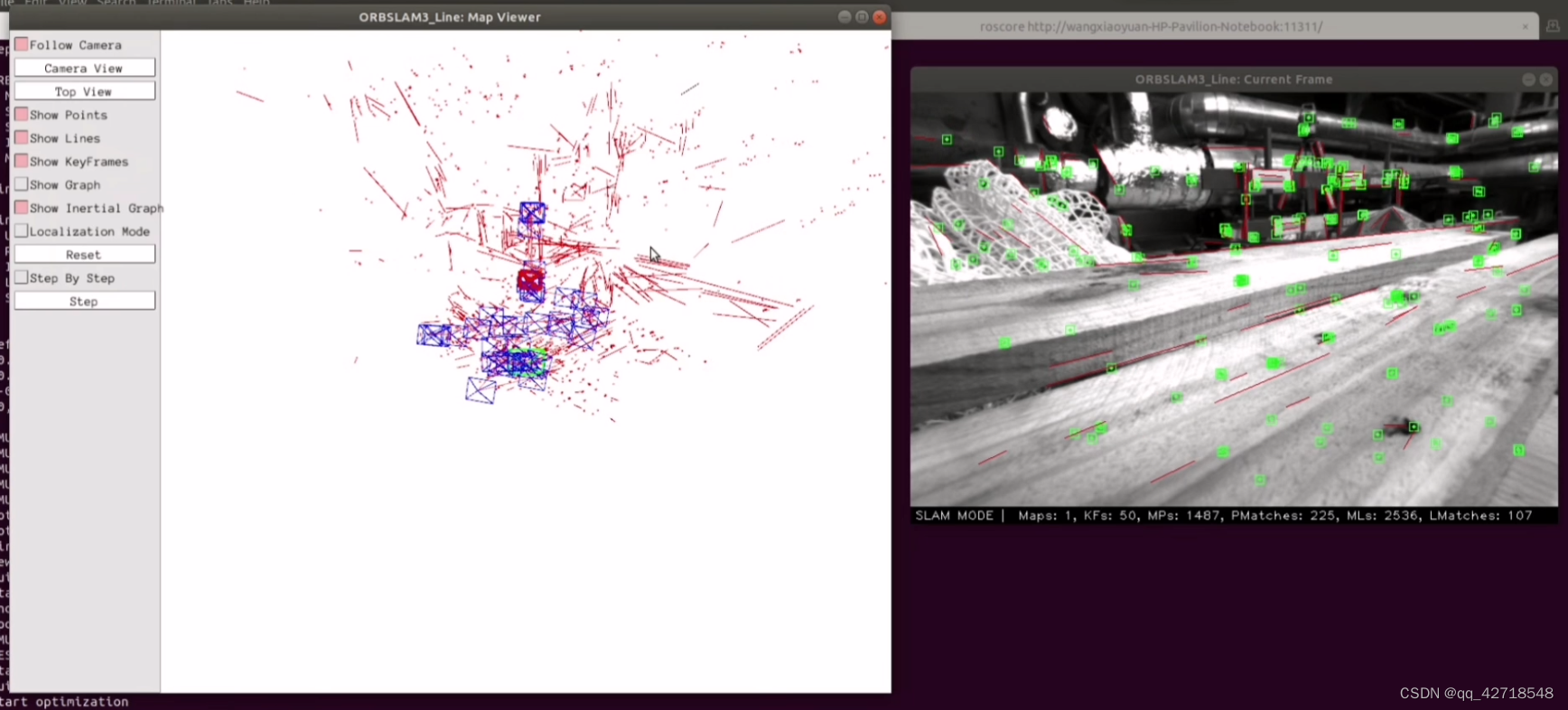
ORBSLAM3加入线特征,支持ROS实时运行,支持相机实时运行,支持单目、单目IMU、双目、双目IMU、RGBD、RGBD-IMU等多种模态。
ORBSLAM3加入线特征,支持ROS实时运行,支持相机实时运行,支持单目、单目IMU、双目、双目IMU、RGBD、RGBD-IMU等多种模态。
 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























