






将一个机器人放入未知环境中的未知位置,是否有办法让机器人一边逐步描绘出此环境完全的地图,同时一边决定机器人应该往哪个方向行进?

扫码获取听课地址

领取最新CV论文及代码合集

SLAM(simultaneous localization and mapping)全称即时定位与地图构建或并发建图与定位,它主要的作用就是让机器人在未知的环境中,完成定位(Localization),建图(Mapping)和路径规划(Navigation)。由于其重要的理论与应用价值,被很多学者认为是实现真正全自主移动机器人的关键。目前,SLAM技术被广泛运用于机器人、无人机、无人驾驶、AR、VR等领域。
主流的slam技术应用有两种,分别是激光slam(基于激光雷达lidar来建图导航)和视觉slam(vslam,基于单/双目摄像头视觉建图导航)。

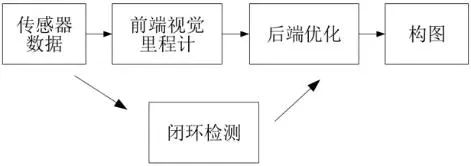
经典的SLAM系统一般包含前端视觉里程计、后端优化、闭环检测和构图四个主要部分。
很多同学都觉得Slam方向难以入门,也难以学深。但其实相对来讲,不像其他很多方向,很多的东西大家都已经做了,并且做的很不错,要想发论文或者找创意突破比较吃力。slam方向还有很多深层次的多领域结合应用的内容还比较少,并且slam更深的内容还有很多东西需要做。
我们邀请到在机器人slam、无线感知、多模态融合、智能视觉领域有深厚落地经验的Wills老师,将系统性为大家讲解机器人导航相关技术,并带大家分析slam创新点的前世今生。
作为大厂技术顾问,Wills老师在机器人slam领域已经颇有建树,同时作为SCI国际会议、期刊审稿人,Wills老师在论文创新点挖掘方面也经验丰富。

扫码获取听课地址

领取最新CV论文及代码合集

至今为止,主流的SLAM方案多是基于处于像素层级的特征点,它们往往只能用角点或边缘来提取路标。与之不同的是,人类通过物体在图像中的运动来推测相机的运动,而非特定像素点。

几乎所有SLAM研究围绕着几个问题进行:
1、Front-end(前端,包括视觉或者lidar前端)和data association(数据匹配)。
2. State estimation(状态估计):状态估计是SLAM的核心,在SLAM算法中,最重要的就是状态估计。
3.Mapping(建图),对于完整的slam,需要使用pgo的优化结果和点云(由各种方法得来,包括且不限于单目算法,双目相机,结构光等等)生成对三维地图的表示,从最简单的occupy map(占用地图),到octomap,tsdf,esdf,到一些submap的技巧等等。
扫码获取听课地址

研究各大厂招聘要求就会发现,有没有顶会论文已经成为一项重要的考核指标,而想要从科研小白变身顶会大神,我觉得有两点至关重要:
1、紧跟风口,把握住最近的热门研究风向。
尤其是对于科研还没什么思路的小白,顺着领域内的研究趋势确定自己的方向,是一个正确的选择,毕竟热门研究方向意味着,创新点和idea远比其他非热门领域多。比如刚刚推荐的画质增强。
2、有一位有经验有能力的前辈指导。选对一个好的老师,掌握正确的科研思路和写作方法!
都说SCI论文只有0篇和无数篇的区别,这句话告诉我们,其实做科研写论文也是有方法有套路可循,掌握了窍门,后面的路才会走得通畅。
但是作为一个小白,还在“蹒跚学步”阶段,怎么去掌握窍门?来自前辈的指点必不可少。
一个好的指导老师的作用是,没有课题,能够结合所在课题组具体情况,结合最近热门研究方向,帮你规划课题,如果有了课题而缺少创新方向,老师能够快速帮你找到几种切入点,几种框架,甚至连需要读哪些文献都帮你想好了......
为了论文,大家都在努力的设计新网络、新策略、新training算法,只要能够在某一问题上做到一个很好的performance,论文就水到渠成。而想要快速达到,来自前辈的指点不可或缺。
扫码获取大佬的科研指导

领取最新CV顶会论文、书籍
文末福利
给大家送一波大福利!我整理了100节计算机全方向必学课程,包含CV&NLP&论文写作经典课程,限时免费领!免费送GPU!


扫码免费领课程资料
-END-














 182
182











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









