







 本文涵盖线性代数核心概念,包括行列式性质、矩阵运算、线性变换及正交矩阵等内容,深入探讨了线性空间、特征值与相似矩阵等高级主题。
本文涵盖线性代数核心概念,包括行列式性质、矩阵运算、线性变换及正交矩阵等内容,深入探讨了线性空间、特征值与相似矩阵等高级主题。
1.行列式
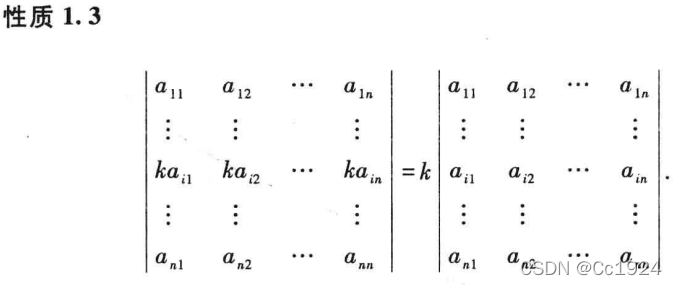
1.1.行列式性质


 注意:
注意:
- 性质1.3 注意和矩阵的数乘区分,这里是只乘在了一行上,而矩阵数乘是乘在每一个元素上。
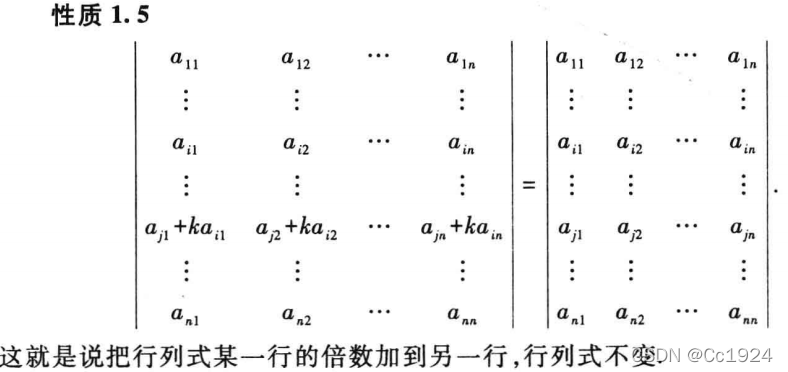
- 性质1.5.是可以使用高斯消元法计算行列式的重要原因。
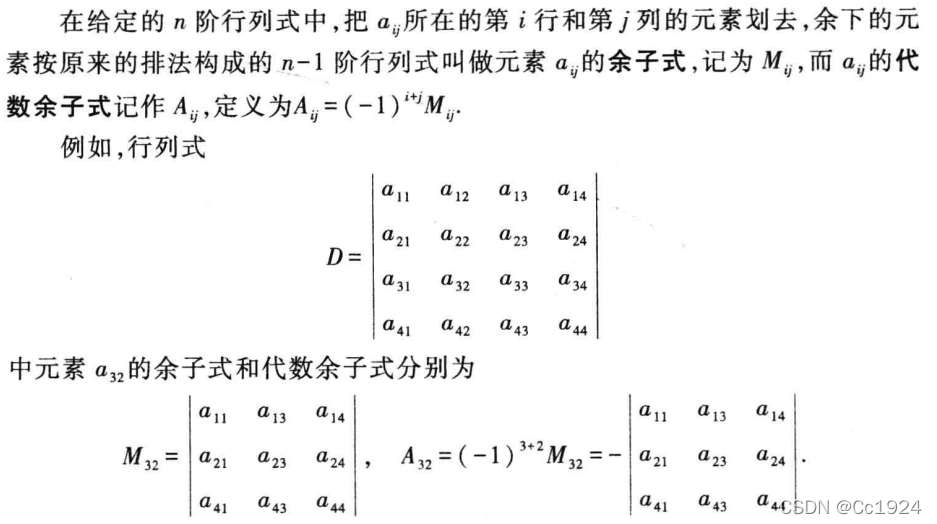
1.2.行列式计算——行列式展开定理

注意:
- 代数余子式是有符号的!
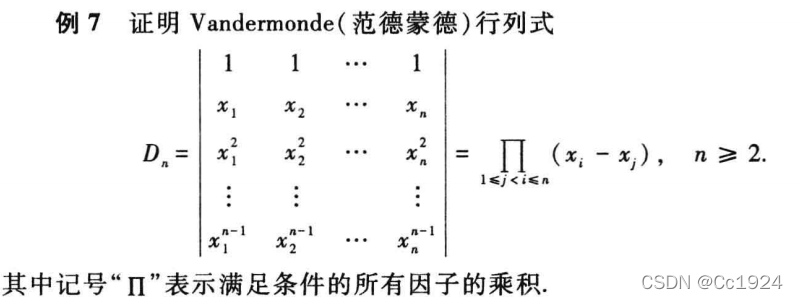
- 一种特殊的行列式——范德蒙行列式
2.矩阵
2.1.数域

2.2.方阵
2.2.1.方阵的幂
2.2.2.方阵的行列式乘法公式
2.3.伴随矩阵

2.4.矩阵的初等变换
2.4.1.矩阵的等价

2.4.2.矩阵的标准形
2.5.矩阵的秩
2.5.1子式和秩
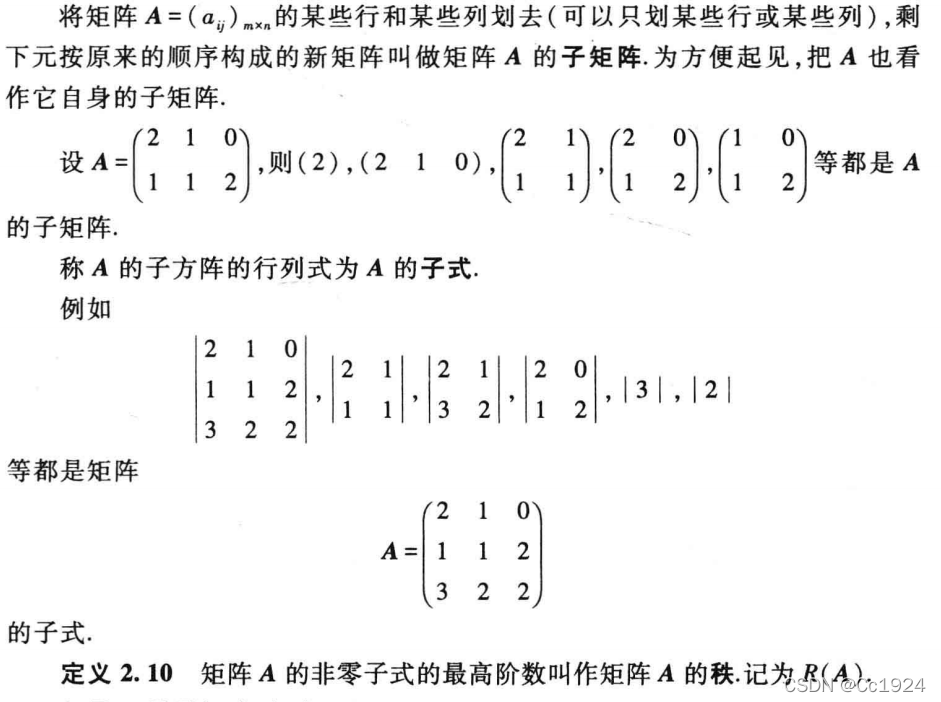 注意:只有零矩阵的秩才是0.
注意:只有零矩阵的秩才是0.
2.5.2.初等变换法求矩阵的秩


2.6.初等矩阵
2.6.1.矩阵等价的充要条件

 注意:
注意:
- 推论2.2说明乘以一个可逆矩阵不改变当前矩阵的秩
2.6.2.初等变换法求矩阵的逆
高斯消元。
2.7.分块矩阵
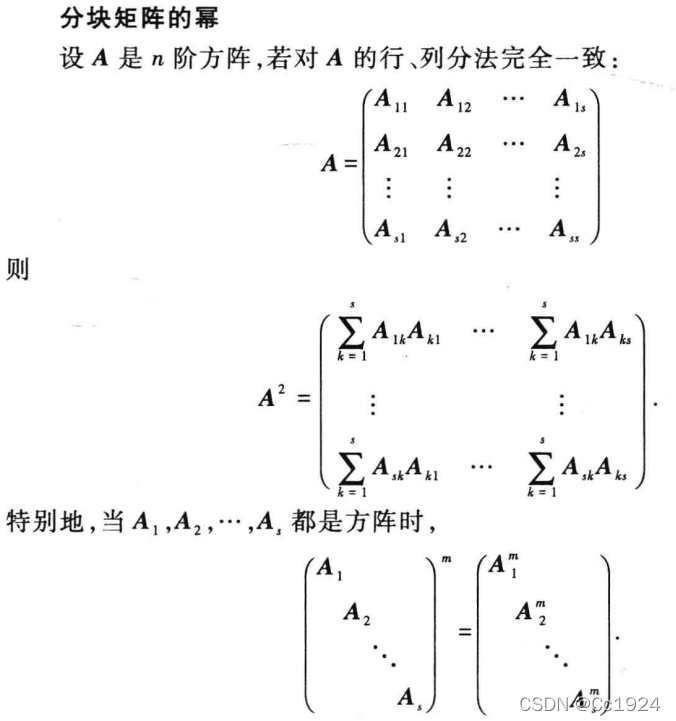
2.7.1.分块矩阵求幂
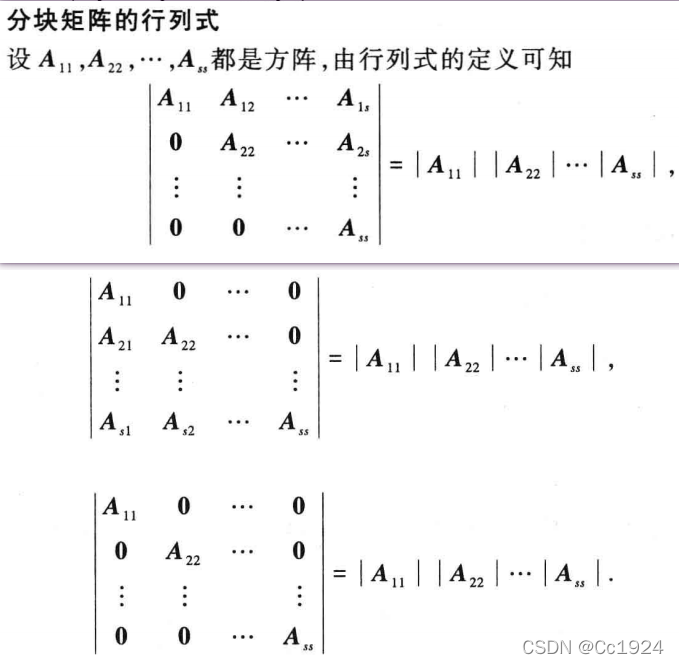
2.7.2.分块矩阵求行列式
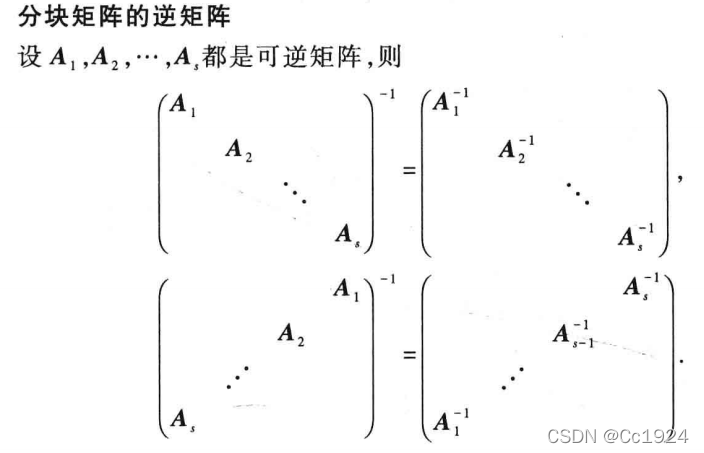
2.7.3.分块矩阵求逆
2.8.分块矩阵的初等变换
3.几何向量
3.1.数量积、向量积和混合积
- 数量积几何意义是投影
- 向量积是有向平行四边形的面积
- 混合积是有向平行六面体的体积,是先算向量积得到平行四边形的面积,再算向量积得投影(也就是六面体的高)
3.2.空间中的平面与直线
4.n维向量
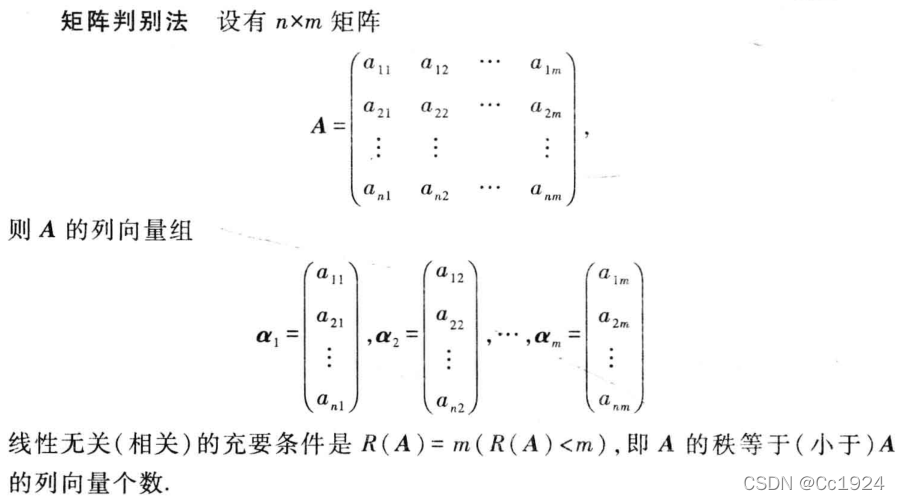
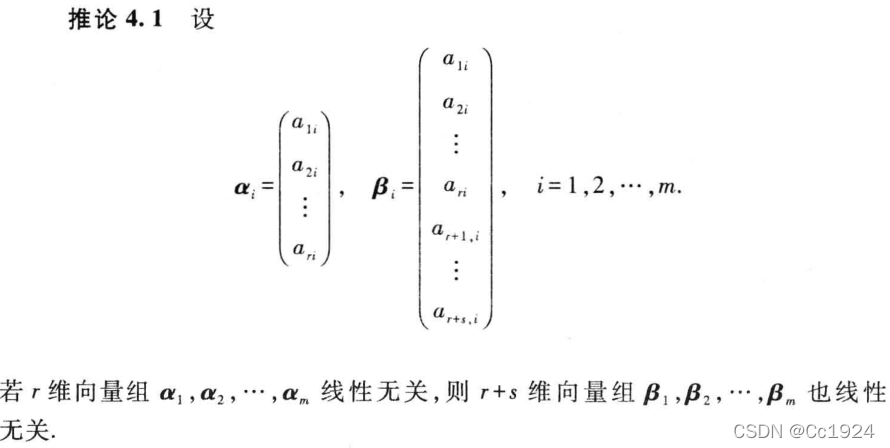
4.1.向量组的线性相关性

4.2.向量组的秩
4.2.1.向量组的等价

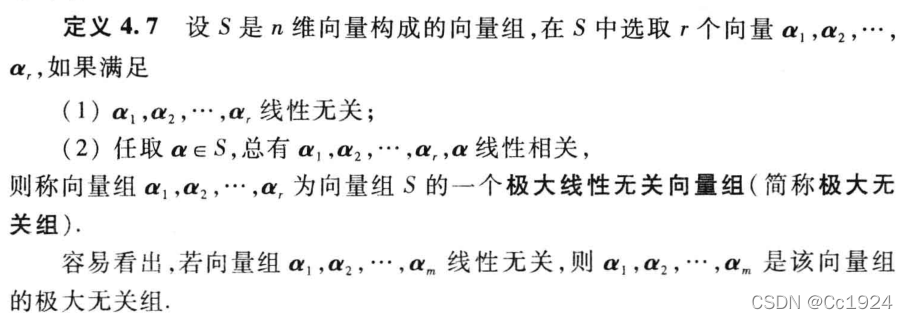
4.2.2.极大无关组和向量组的秩

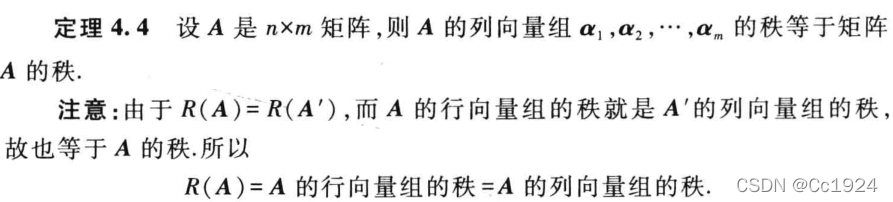
4.2.3.矩阵的秩和向量组的秩的关系
4.3.向量空间
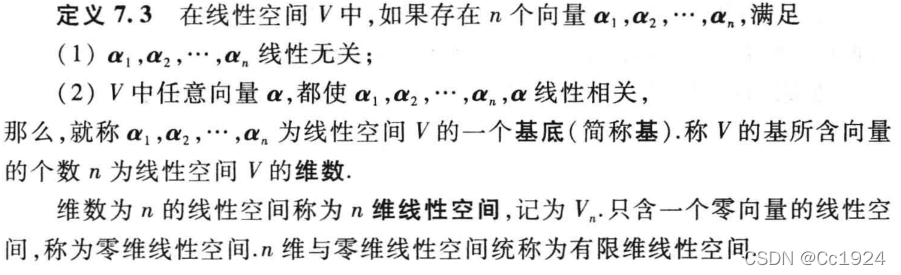
4.3.1.基和维数

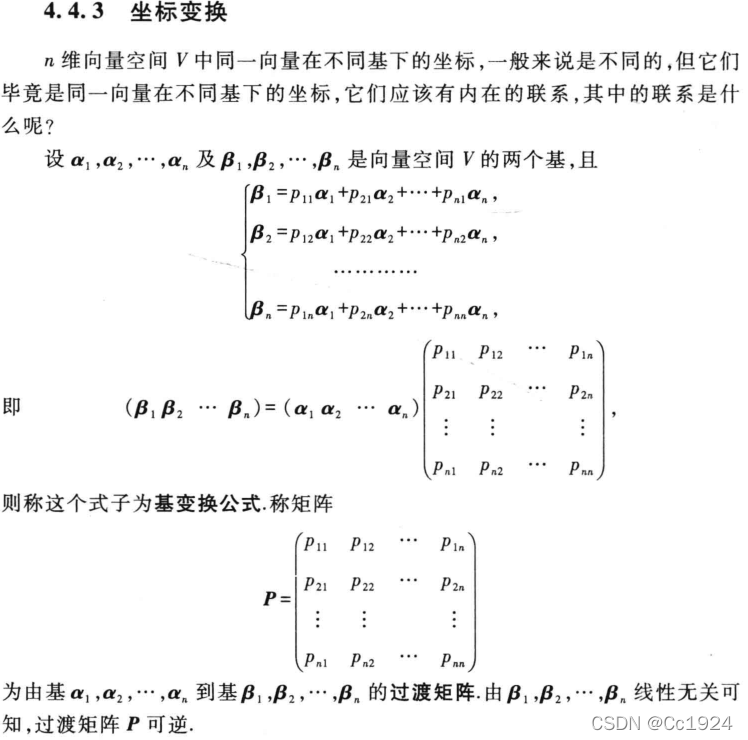
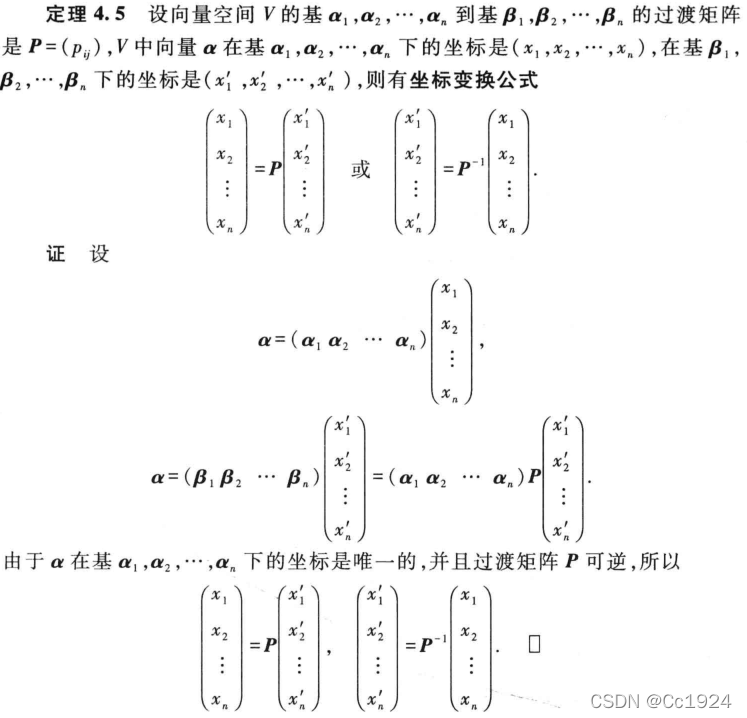
4.3.2.坐标变换(重要)
注意:
- 坐标变换和后面的线性变换有相关性,注意和后面的对比和区分。
- 理解这里的基变换公式中的过渡矩阵的位置。根据上面的公式可知,从一组基 α i \alpha_i αi到另一组基 β i \beta_i βi的过渡矩阵P,P的每一列实际上就是 β i \beta_i βi在 α i \alpha_i αi下的表示,也就是 β i \beta_i βi在 α i \alpha_i αi下的坐标。
- 理解坐标变换公式:一个向量在基 β i \beta_i βi下表示的坐标是 x ′ x' x′,转换到基 α i \alpha_i αi下表示为 x x x,所以就是 x = P ∗ x ′ x=P*x' x=P∗x′。可以这样记忆,假设 x ′ = ( 1 , 0 , 0...0 ) T x'=(1, 0, 0 ... 0)^T x′=(1,0,0...0)T,那么 P ∗ x ′ 得 到 矩 阵 P 的 第 一 列 , P*x'得到矩阵P的第一列, P∗x′得到矩阵P的第一列,实际上就是 β 1 \beta_1 β1在基 α \alpha α下的表示。
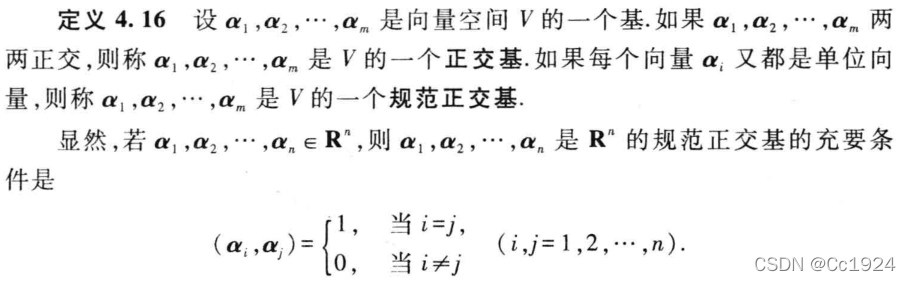
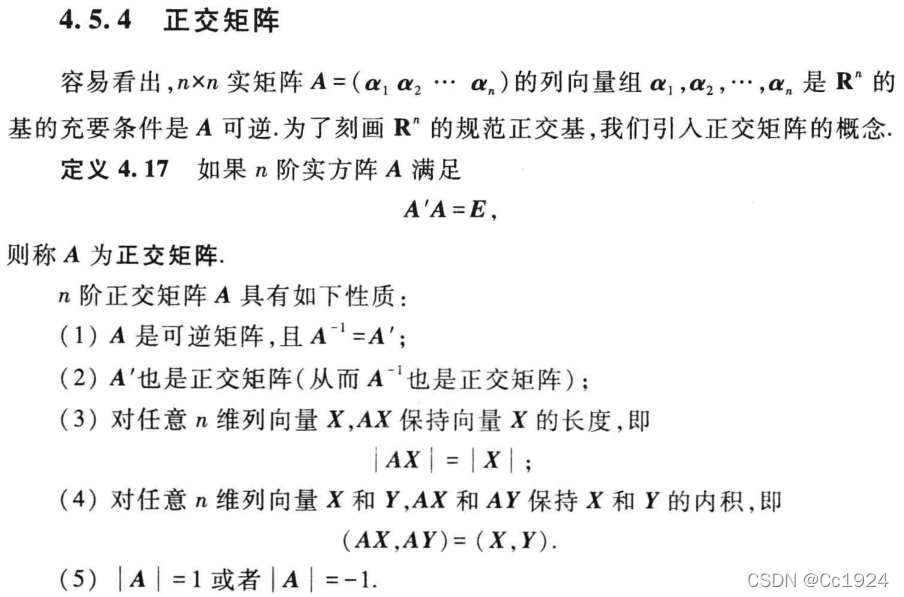
4.3.3.规范正交基
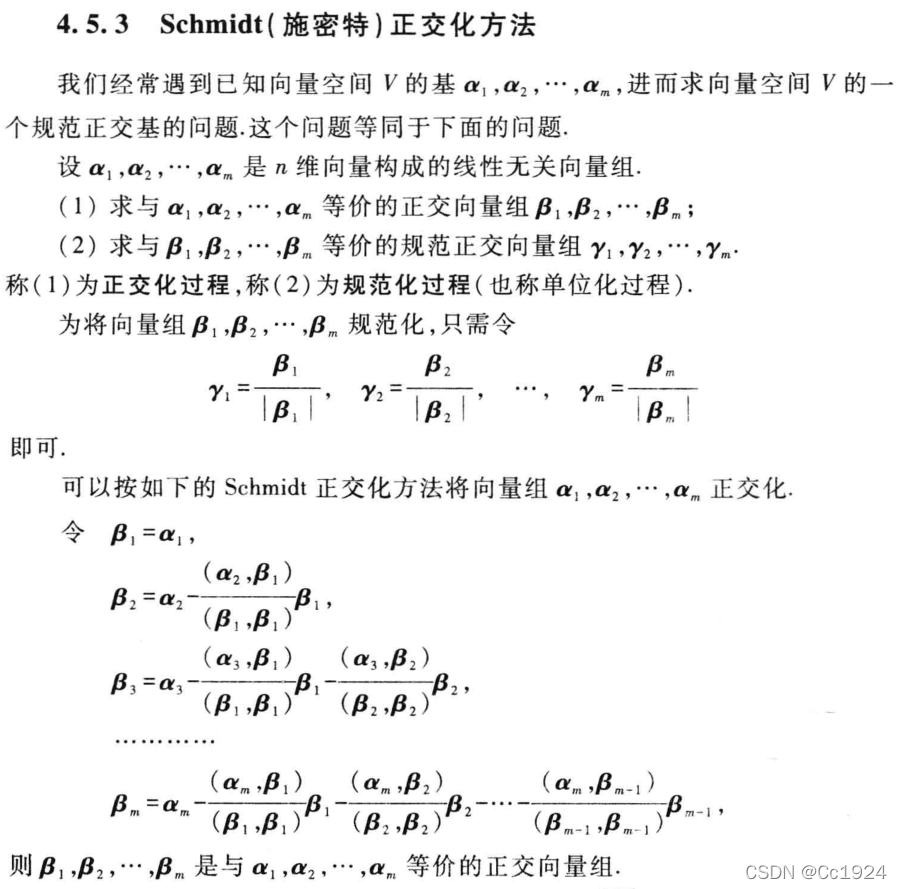
4.3.4.Schmidt正交化方法
4.4.正交矩阵

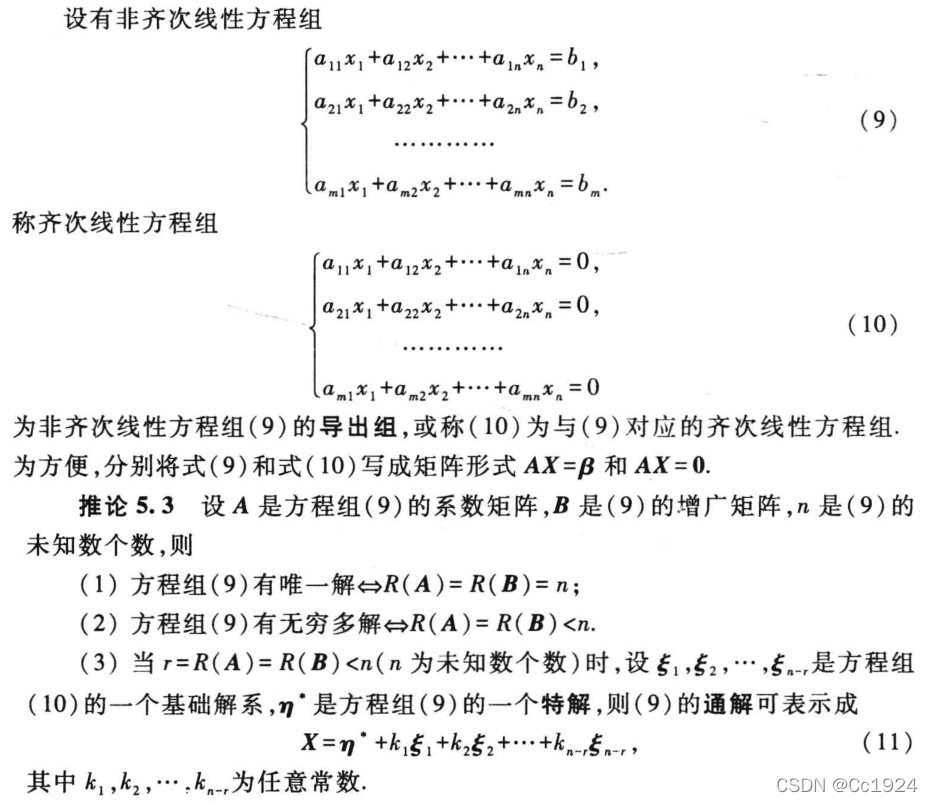
5.线性方程组
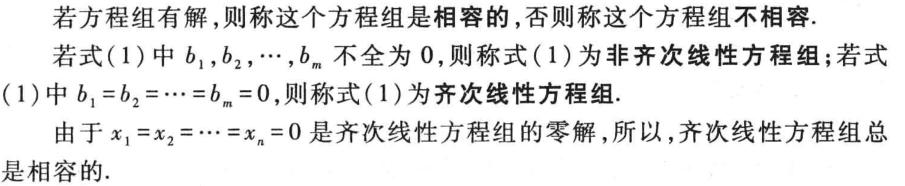
5.1.方程组有解的充要条件

注意:
- 齐次线性方程组总有解,因为零向量始终是它的解
- 非齐次线性方程组有解的充要条件是R(A)=R(B),由于矩阵的秩等于高斯消元之后得到的行阶梯形矩阵中非零行的个数,所以这里R(A)=R(B)就等价于最后A和B消元后非零行的个数是相等的,就相当于左边是0右边也要是0,这样非齐次线性方程组就有解。
5.2.线性方程组解的结构
5.2.1.齐次线性方程组解的结构
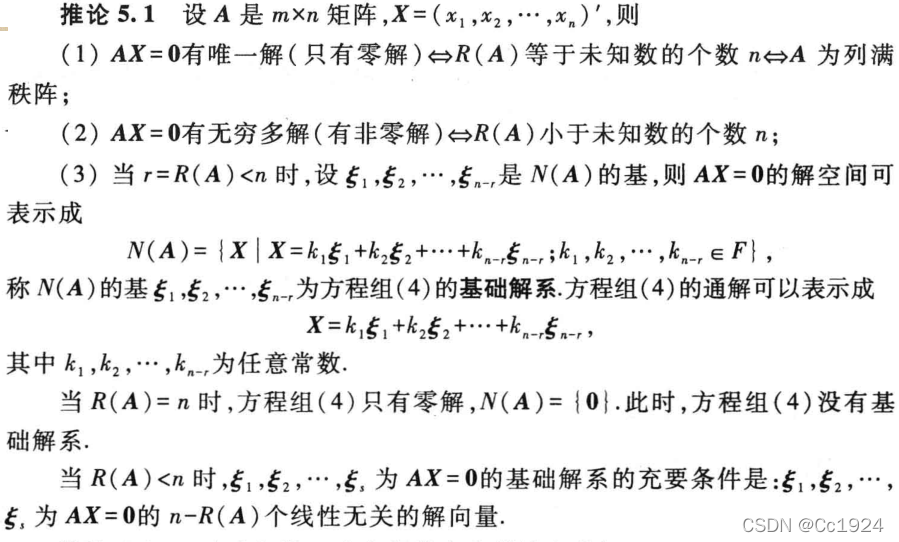
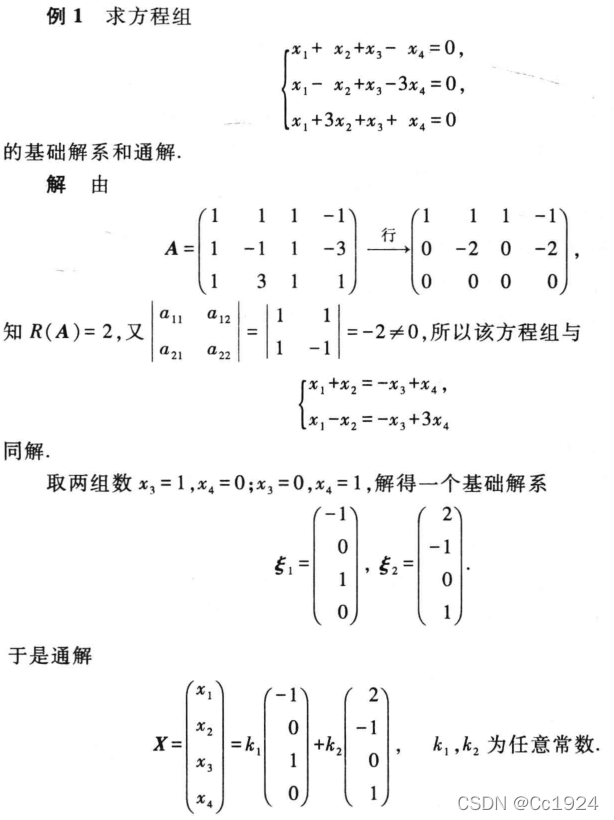 注意:这里求通解的时候,就是把自由变量依次取为1,然后求得一个解空间的基。
注意:这里求通解的时候,就是把自由变量依次取为1,然后求得一个解空间的基。
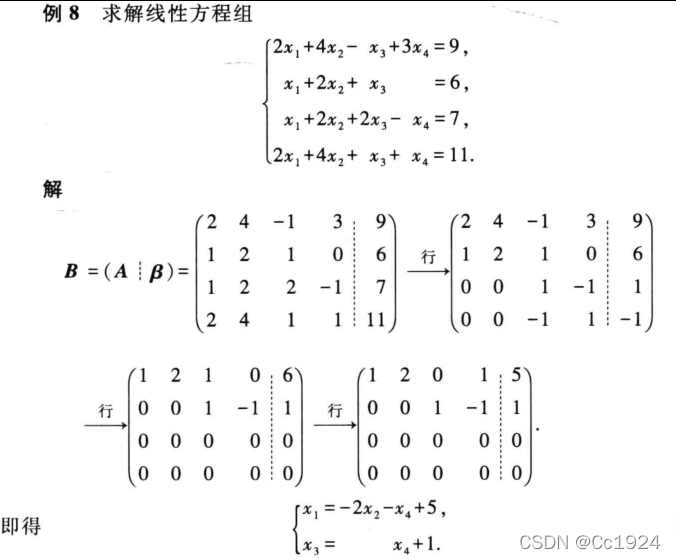
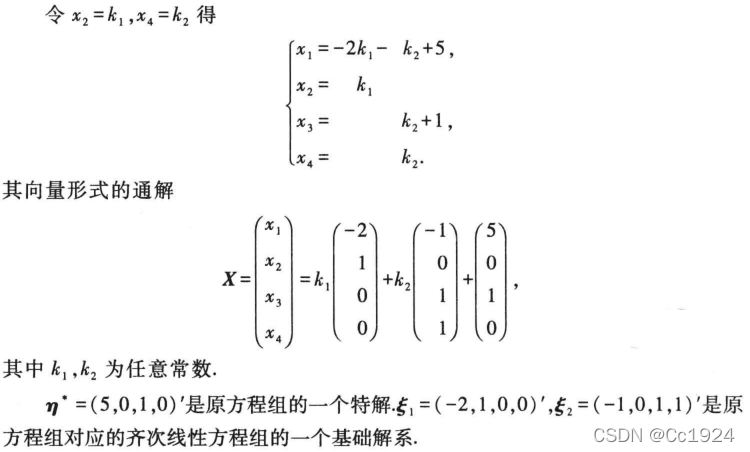
5.2.2.非齐次线性方程组解的结构
 注意:
注意:
- 这里求特解的时候,就是把所有的自由变量都置为0,求得的解向量就是特解。因为如果自由变量不是0的话,实际上此时得到的解向量中就包含 A x = 0 Ax=0 Ax=0的通解向量中的成分,答案是没问题的,只不过不是“纯净”的特解。
- 在求通解的时候就是正常按照 A x = 0 Ax=0 Ax=0的求解方式进行求解,也就是对各个自由变量分别赋值为1,然后求得解空间的一个基向量。
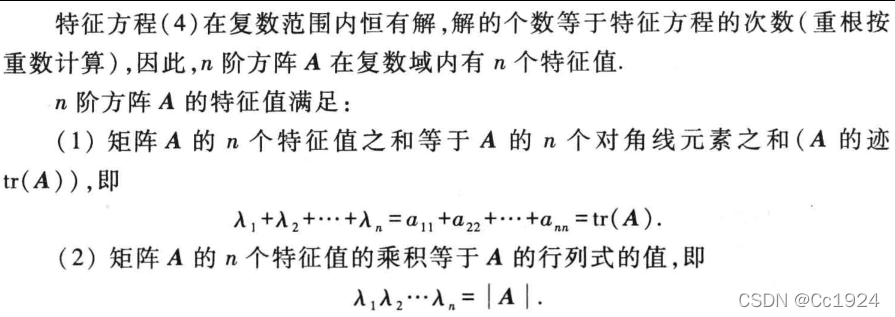
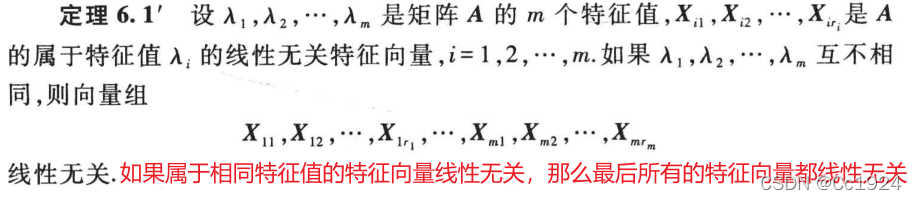
6.特征值、特征向量和相似矩阵
6.1.特征值的性质

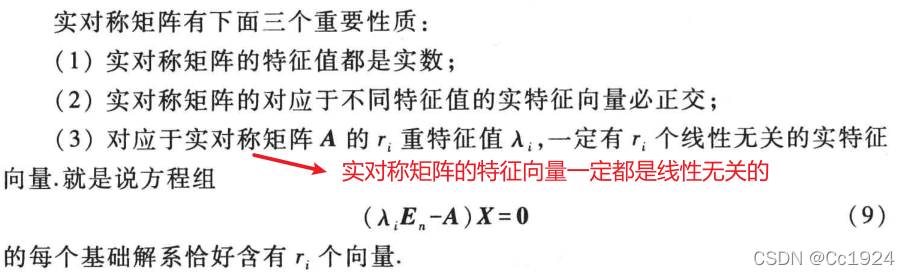
6.2.实对称矩阵的特征值和特征向量
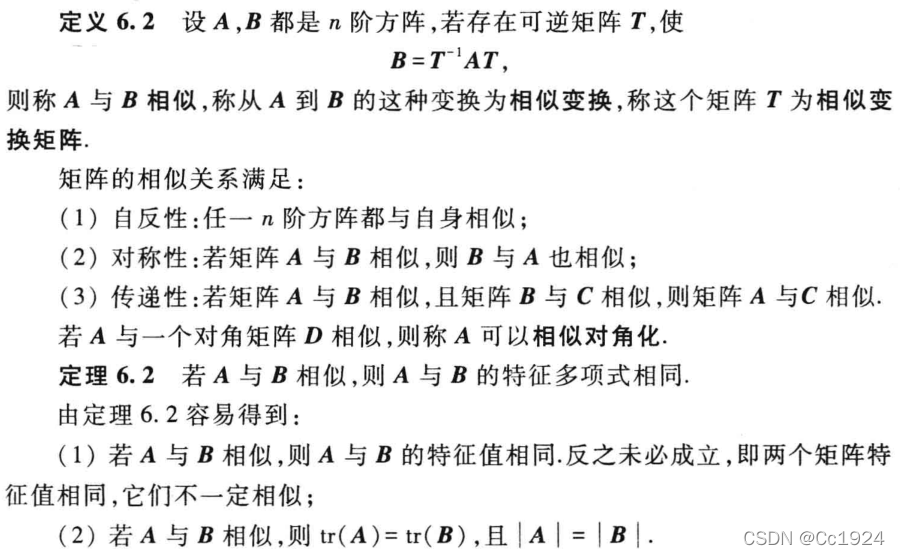
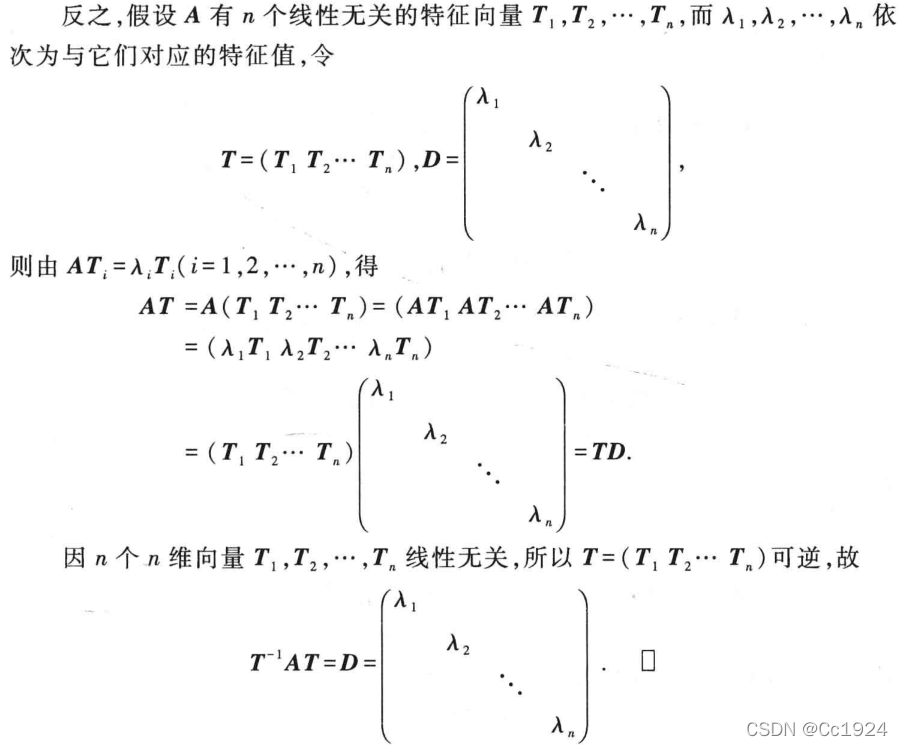
6.3.相似矩阵
6.3.1.相似矩阵的定义
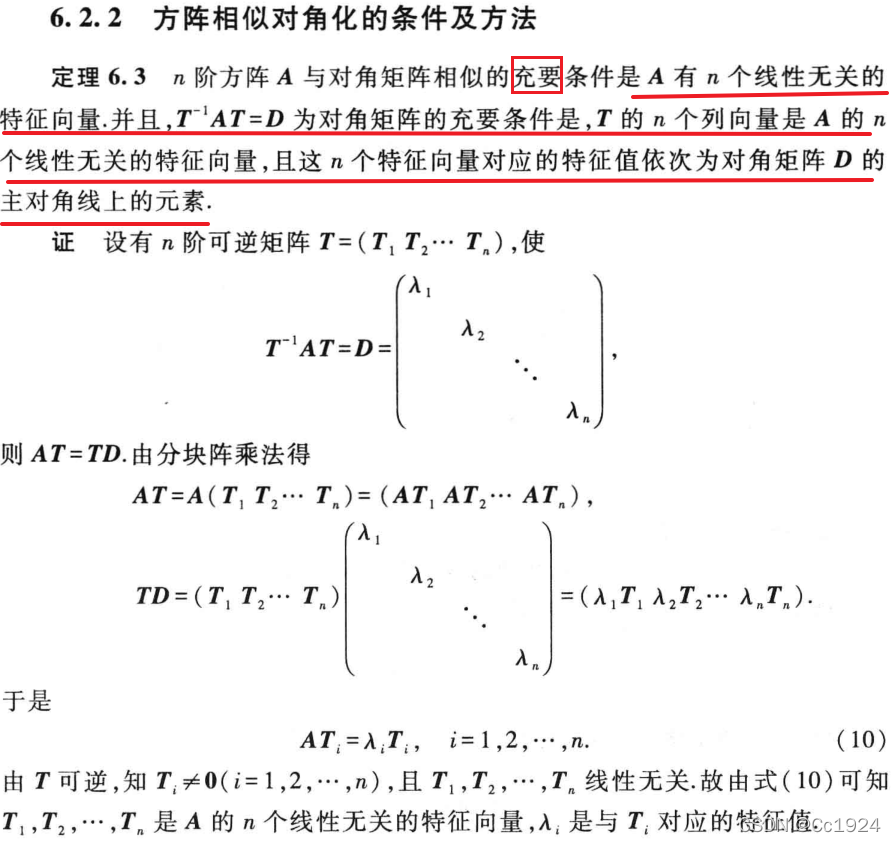
6.3.2.方阵相似对角化的条件及方法

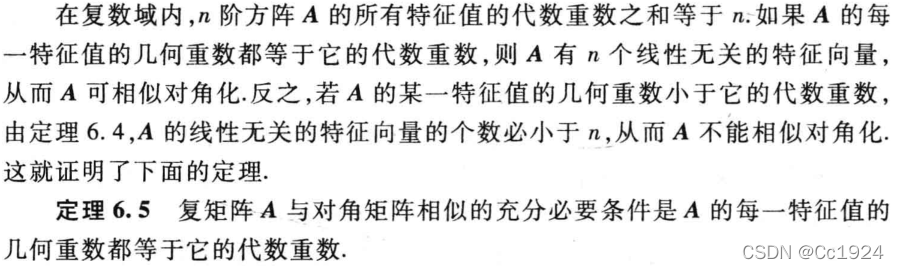
6.3.3.几何重数和代数重数

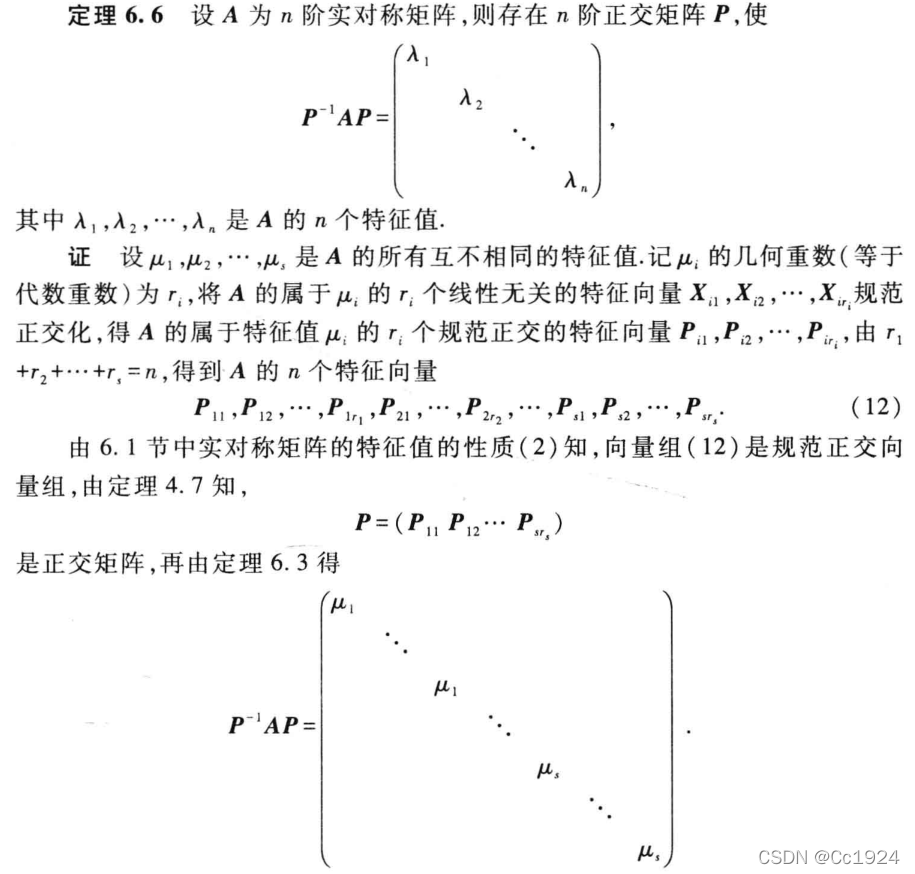
6.3.4.实对称矩阵的正交相似对角化
注意:
- 实对称矩阵的一个性质就是属于不同特征值的特征向量必定正交,并且所有特征值的几何重数等于代数重数,所以实对称矩阵一定可以相似对角化。
- 所以在求实对称矩阵的正交相似对角化矩阵的时候,只需要把属于同一个特征值的特征向量进行施密特正交化,让这些“类内”特征向量正交,而“类外”特征向量本来就正交,所以最后得到的特征向量组就全都是正交的。
7.线性空间与线性变换
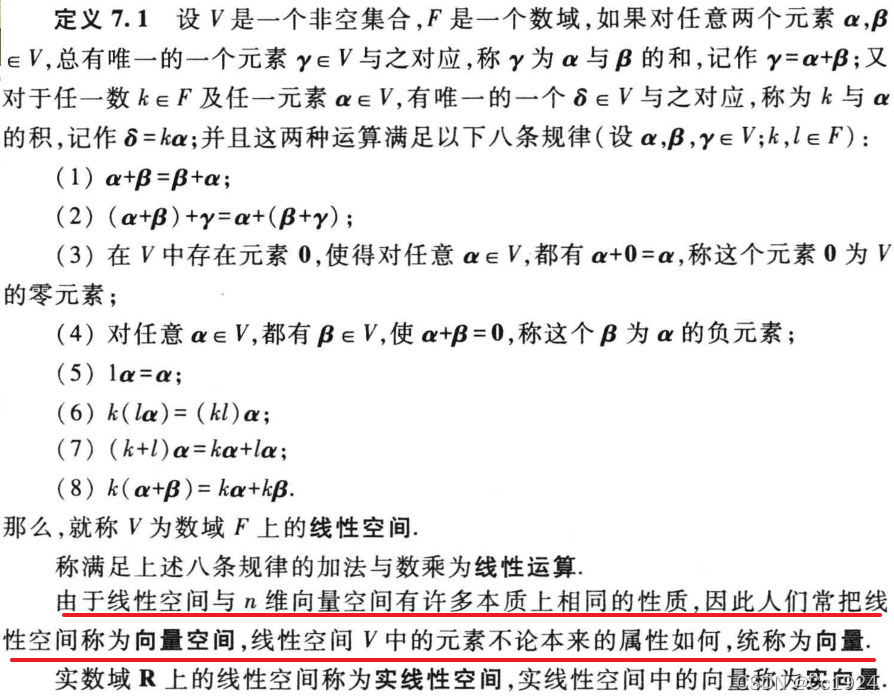
7.1.线性空间的概念
注意:
- 这里没有很理解线性空间和向量空间之间的区别。
7.2.线性空间的基和维数
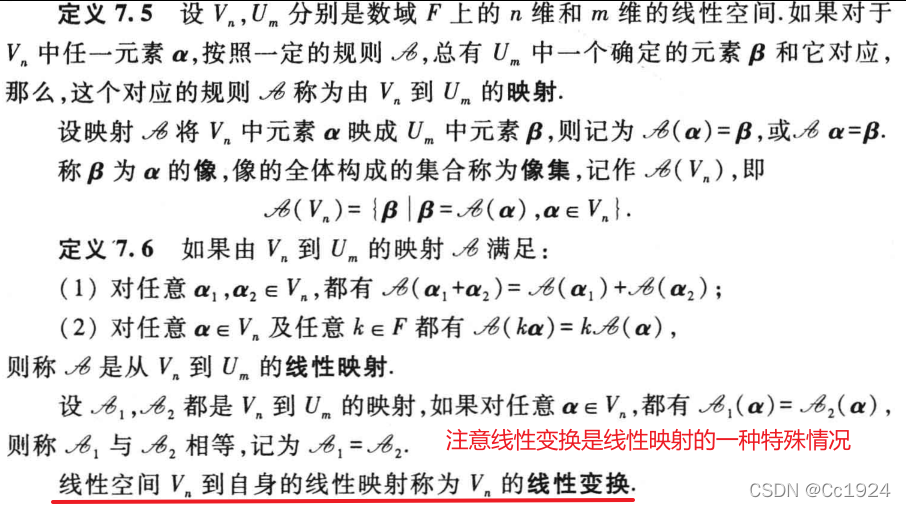
7.3.线性变换(重要)
7.3.1.线性变换的定义
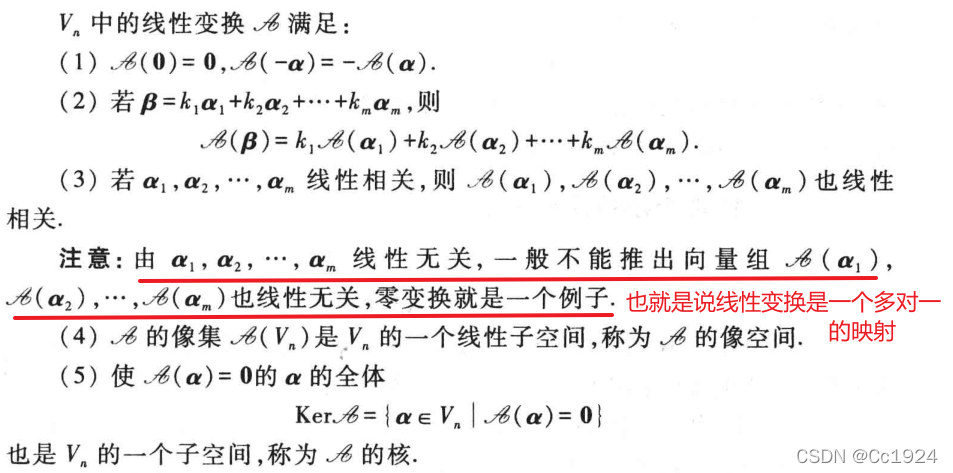
7.3.2.线性变换的性质
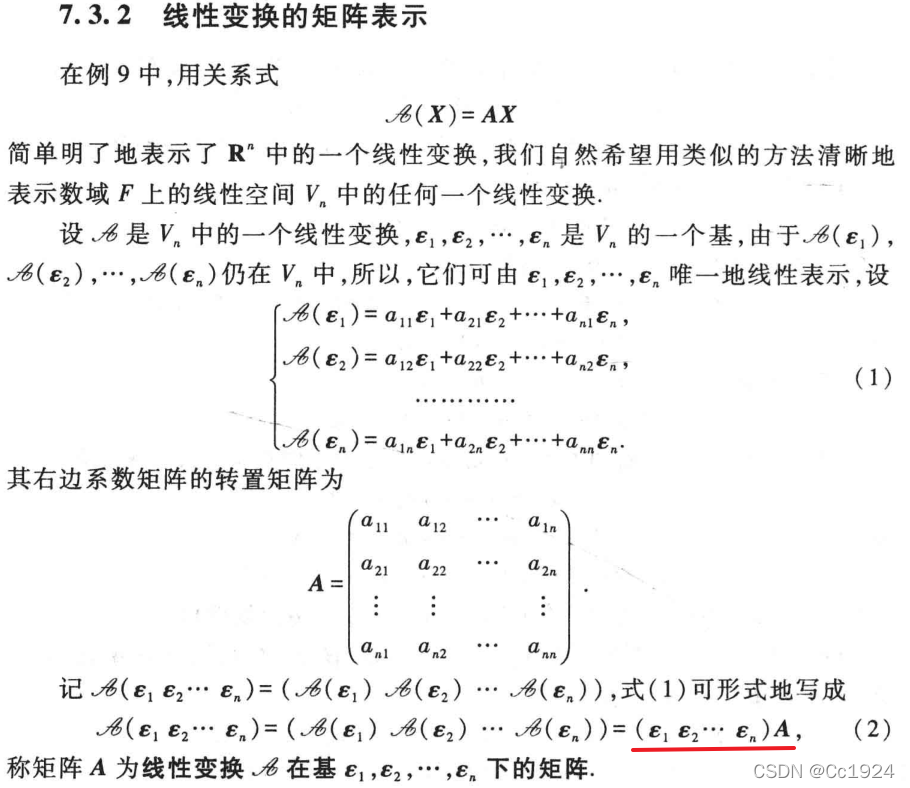
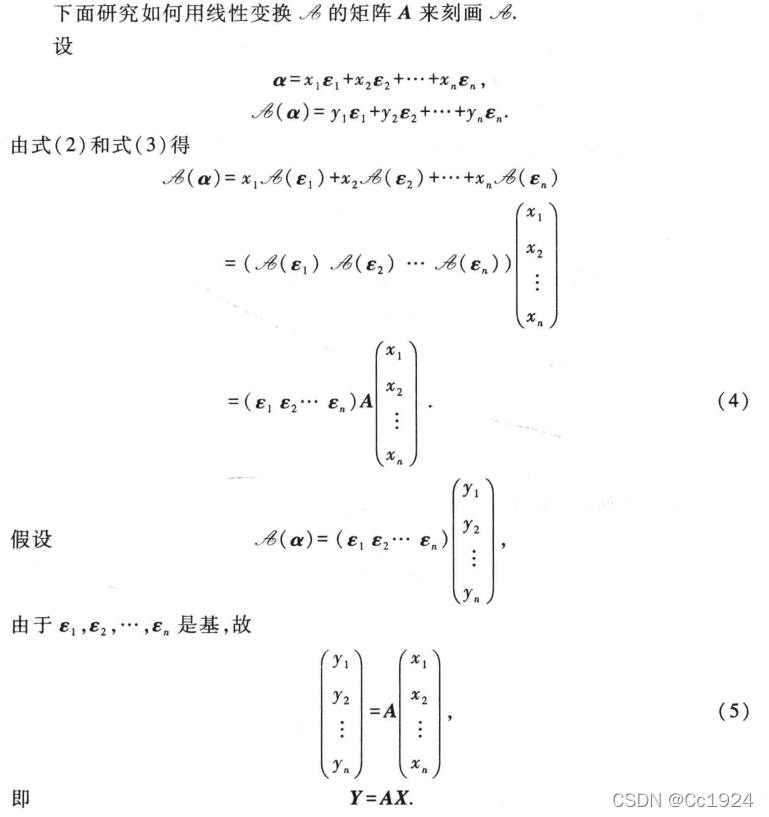
7.3.3.线性变换的矩阵表示(重要)
7.3.3.1. 线性变换在某个基下的矩阵A
7.3.3.2. 使用线性变换的矩阵A对坐标进行变化
注意:
- 理解这里的线性变换在某个基下的矩阵A:这里的矩阵A和前面向量坐标变换时的矩阵P是一样的。实际上,对基 ϵ i \epsilon_i ϵi进行线性变换得到的 A ( ϵ i ) \mathcal{A}(\epsilon_i) A(ϵi)就相当于是向量坐标变换中的另一组基 β i \beta_i βi,也就是基 β i \beta_i βi在基 α i \alpha_i αi(也就是这里的 ϵ \epsilon ϵ)下的表示。
- 但是这里的 A \mathcal{A} A的矩阵对向量 x x x进行线性变换后的坐标和前面的向量坐标的变换是相反的,原因在于这里的线性变换是把一个向量进行线性变换(旋转缩放等),然后新的坐标就是变换后的新的向量仍然在原来的基 ϵ i \epsilon_i ϵi下的表示。可以这样记忆,假设原来的向量 x = ( 1 , 0 , 0...0 ) T x=(1, 0, 0 ... 0)^T x=(1,0,0...0)T,那么 A ∗ x A*x A∗x得到矩阵A的第一列,实际上就是 ϵ 1 \epsilon_1 ϵ1经过线性变换后仍然在基 α i \alpha_i αi下表示的坐标。
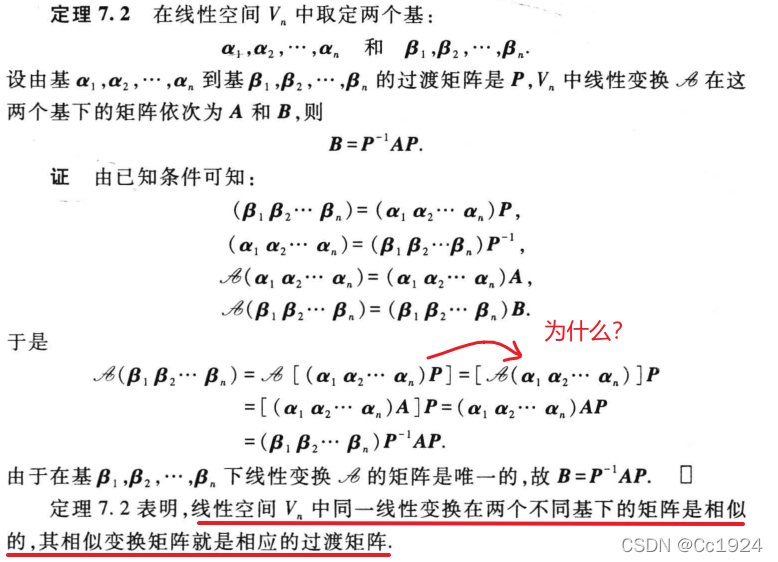
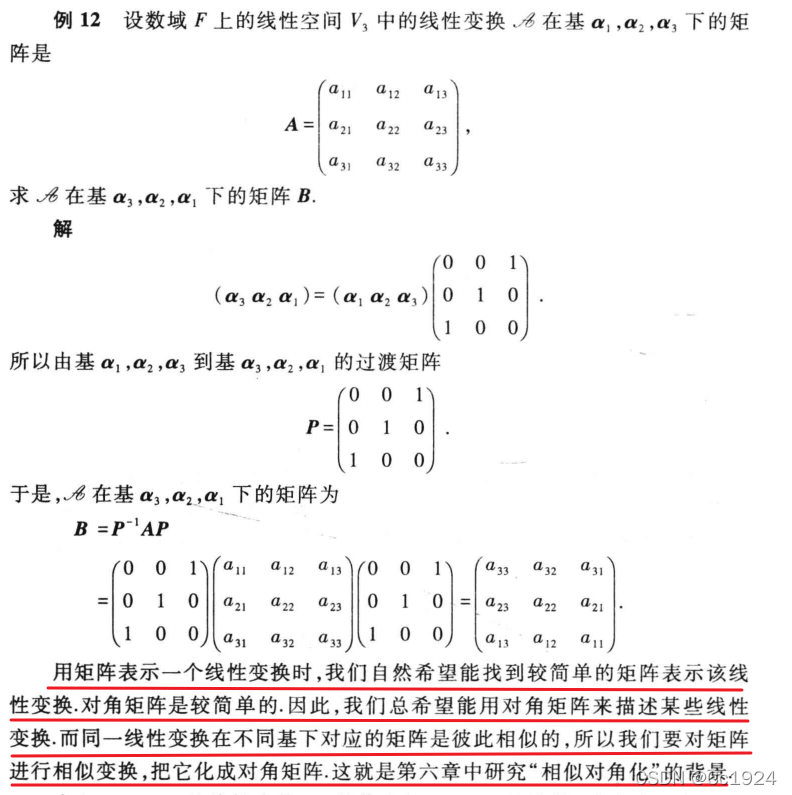
7.3.3.3. 同一个线性变换在不同的基下的矩阵之间的关系
8.二次型与二次曲面
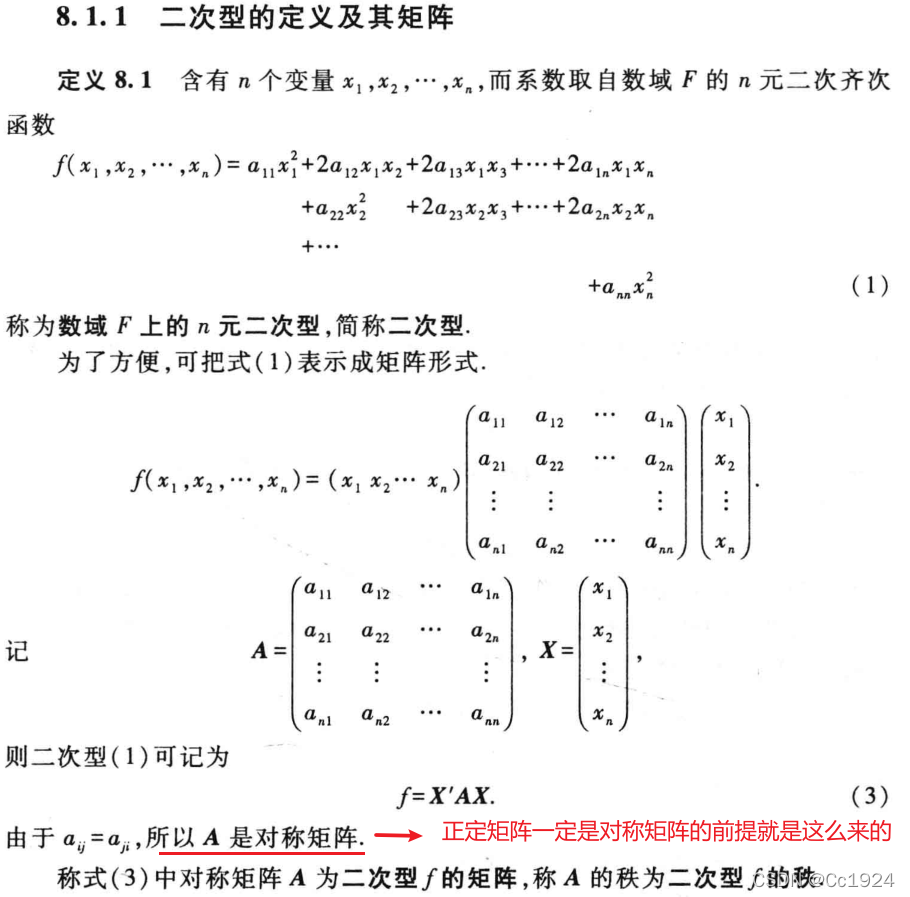
8.1.二次型的定义及其矩阵
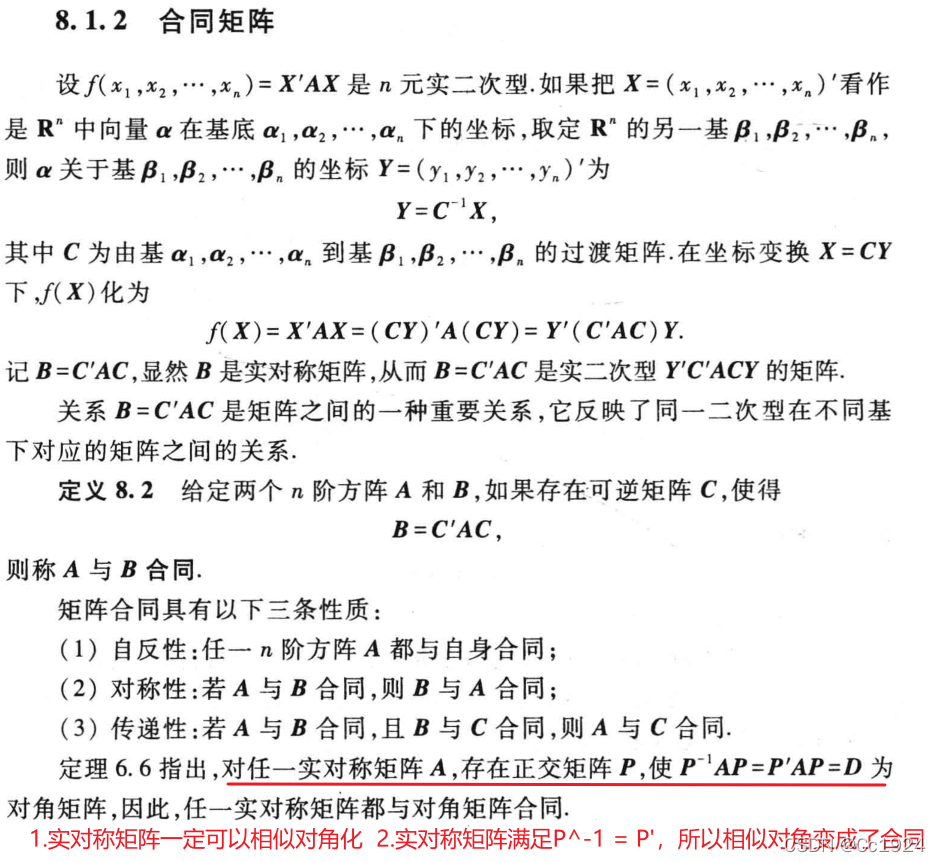
8.2.合同矩阵
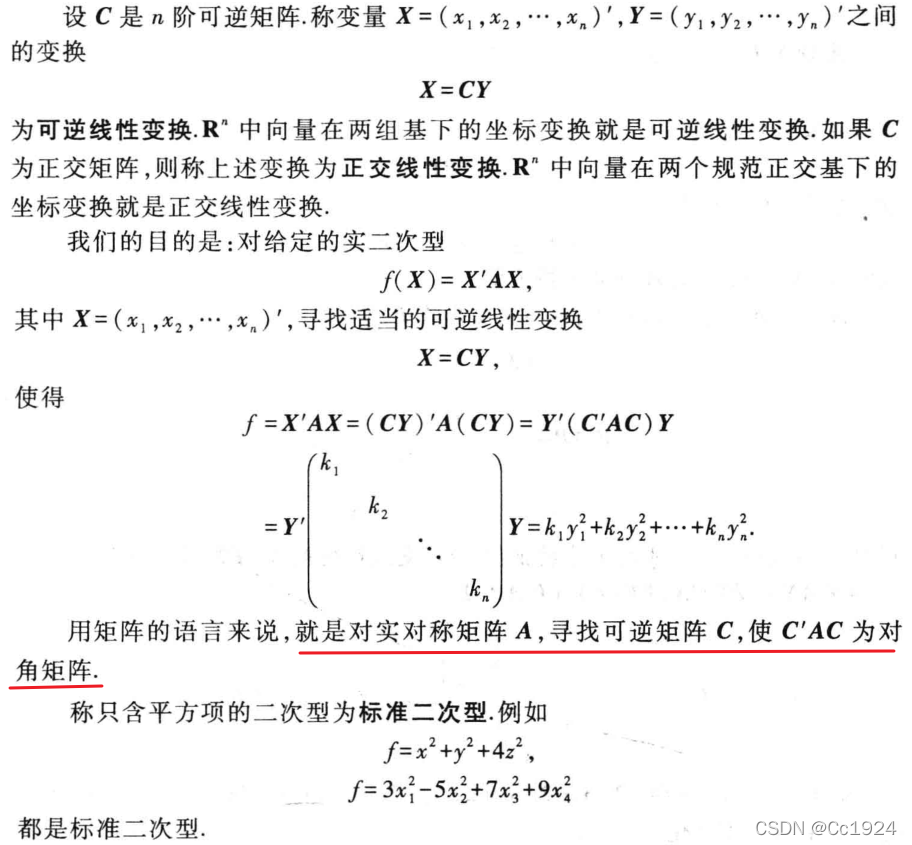
8.3.实二次型的标准型
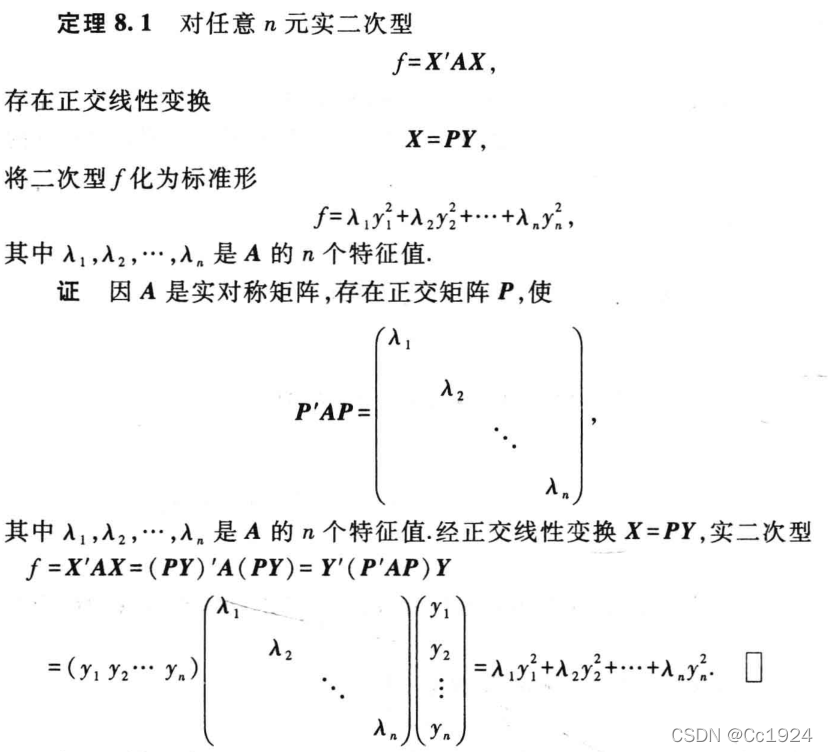
8.4.使用正交变换化为标准二次型
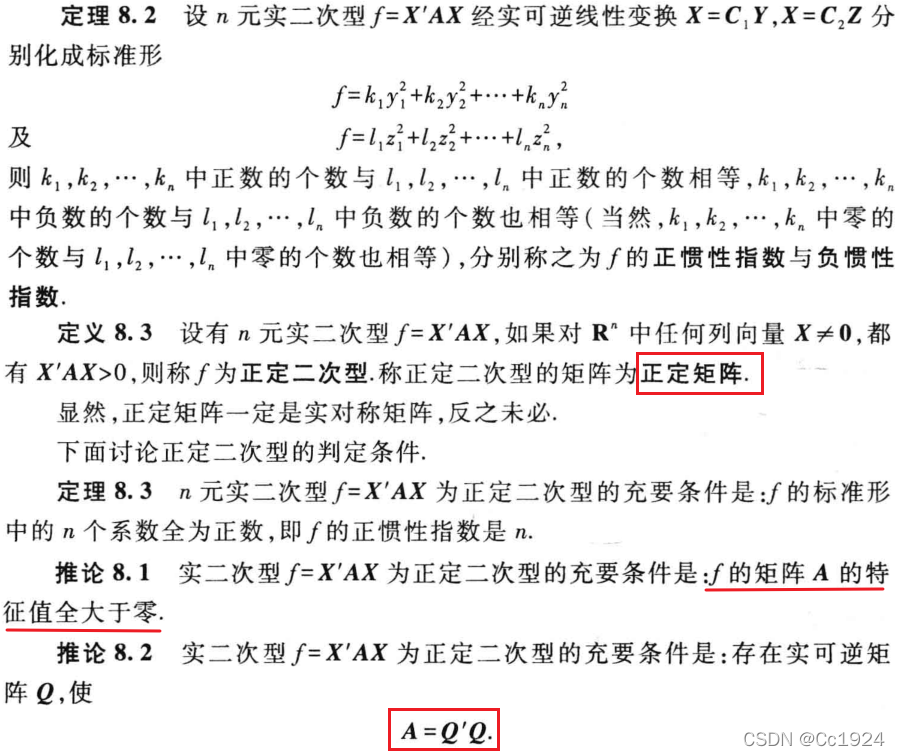
8.5.正定矩阵和正定二次型(重要)
 注意:根据上面的两个推论可以知道正定矩阵的几个性质:
注意:根据上面的两个推论可以知道正定矩阵的几个性质:
- 正定矩阵一定是对称矩阵(这是定义前提决定的)
- 正定矩阵的特征值全部大于0
- 正定矩阵可以分解为一个可逆矩阵的转置和这个可逆矩阵的乘积

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









