






公交优先读书笔记001:Max pressure control of a network of signalized intersections
Author:Pravin Varaiya
date:2013
对象:信号交叉口网络的控制。
车辆在入口链路以 iid(独立、同分布)流的形式到达,在具有固定概率或转弯比的交叉路口独立转弯,并在到达出口链路时离开网络。每个路口的每个转弯运动都有一个单独的队列。
这些是没有存储容量限制的点队列。在每次控制选择一个“阶段stage”时,它会在给定的 iid 饱和流速下启动一组同时的车辆运动。网络演进被建模为受控存储转发 store-and-forward (SF) 排队网络。
store-and-forward (SF) : 这是通信的概念
状态的解释: 控制可以是状态的函数,状态是所有队列长度的向量。如果存在稳定队列的控制,则称一组需求是可行的,即每个平均队列长度的时间平均值是有界的。
可行需求集 D: 是由一组线性不等式定义的凸集,该集合仅涉及需求、转向比和饱和率的平均值。如果需求在 D 的内部
D
0
D^0
D0,则有一个固定时间控制来稳定队列。
最大压力 (MP) 控制:在每个交叉口,MP 选择一个仅取决于交叉口相邻队列的stage。 MP 控制不需要平均需求的知识。如果需求在 Do,MP 会稳定网络。
因此,MP 最大化网络吞吐量。 MP 需要平均转弯比和饱和率的先验知识,但是如果可以测量转弯运动和饱和率,则 MP 的自适应版本将具有相同的性能。
MP 相对于其他 SF 网络控制公式的优势在于它
(1) 只需要每个交叉路口的局部信息;
(2) 可证明的最大化吞吐量。
示例表明,其他局部控制器,包括优先服务和全驱动控制( priority service and fully actuated control,),可能无法稳定。
提供了 MP 的几种修改,包括一种保证每种方法的最短绿灯时间和另一种考虑加权队列;还讨论了有限存储容量的影响。
1. Introduction
本文将信号化道路网络中的交通演变建模为队列网络。
这个网络的状态是所有交叉点的所有队列长度的向量。 任何时候的信号控制都允许在每个交叉口以预先指定的饱和率同时进行某些转弯运动。
Miller (1963) 研究了在单个交叉口的一种方法的队列,该模型由方程建模:(略)
网络模型 (2) 没有在文献中进行分析,即使对于固定时间控制也是如此。 (一个值得注意的例外是 Osorio 和 Bierlaire (2009) 中网络模型的近似均衡分析。)特别是,似乎不知道对于随机到达和服务,特定的固定时间控制是否会稳定网络, 即,所有队列都具有有界均值。 这个问题由定理 3 解决,它指出当且仅当每个队列的平均总到达率小于平均服务率时,固定时间控制才能稳定网络。
不是对已发表作品的统计特性进行分析,而是侧重于反馈或交通响应控制的设计,其中选择交叉路口信号作为当前状态的函数,即网络中所有队列长度的向量。 由于在 Mirchandani 和 Head (2001)、Papageorgiou 等 (2003)、Osorio 和 Bierlaire (2008) 以及 Xie 等 (2012) 中有很好的评论,因此这里没有详细总结大量文献。 在这里,我们讨论了该文献与本文的贡献之间的一些主要区别。 Varaiya (2013) 中提供了该文献与最大压力或 MP 控制之间更关键的比较。
OPAC (Gartner et al., 2001)、RHODES (Mirchandani and Head, 2001) 以及广泛部署的 SCOOT Robertson 和 Bretherton (1991) 等系统中的信号控制计算是分布式的,即每个交叉口的控制是分布式的独立设置,目的是在某个范围内最小化上游队列的某些度量。OPAC 使用上游流量测量来预测滚动范围内的流量(通常是一个周期)。
RHODES 使用“动态网络模型”来估计链路流量,这些链路流量用于根据车辆到达的预测调整每个交叉路口的控制。网络模型包括需求、转弯概率和饱和流量作为参数。 SCOOT 测量每个交叉口的上游流量以更新队列模型。
这些模型都没有考虑信号控制对下游队列的影响。第 5 节中的反例表明,此类控制可能因此会破坏稳定。(不可能为这些控制方案提供精确地反例,因为它们没有在已发表的文献中进行数学描述。)
另一方面,TUC (Diakaki et al., 2003; Aboudolas et al., 2009b) 规定了集中控制,这可能需要大量的通信基础设施。 相比之下,MP 中的计算是局部的:在任何时候对每个交叉路口的 MP 进行评估只需要知道当时相邻链路的队列。
根据 Lindley (2012) 的说法,交通响应和自适应控制取得了巨大的收益,但由于检测和通信的部署成本以及收益的不确定性,美国只有不到 10% 的交叉口使用自适应信号。
其次,这些信号控制系统试图在无限或有限滚动范围内最小化成本。 计算未来成本需要预测未来需求和转向比,如果预测有偏差,控制策略将不是最优的,参见 Varaiya (2013)。
相比之下,MP 不需要了解需求,尽管它确实需要了解转向比(turn ratios)。 但是,MP 的自适应版本 AMP 可以估计这些转向比。
第三个区别是理论上的。 这些系统都没有保证最终的闭环系统是稳定的。 定理 2 表明,如果存在任何稳定控制,则 MP 是一个稳定控制。 因此,MP 最大化吞吐量。
本文的结构如下。
第 2 节阐述了一个静态流量问题,包括平均(平均)需求、转向比和饱和率。 在这个公式中,可行需求集 D 的特征是一组线性不等式,每个
d
∈
D
0
d\in D^0
d∈D0可以由一个固定时间控制器支持。
第 3 节描述了基本的 MP 控制,并表明它最大限度地提高了吞吐量。
第 4 节考虑了基本 MP 的几种变体,包括自适应 MP,以及加权队列的使用。
第 5 节专门讨论三个示例:两个交叉路口网络的完全驱动控制、单个交叉路口的利用率最大化和基于优先级的控制,所有这些都是不稳定的,即使在每种情况下都存在稳定的定时控制。
第 6 节总结了结论,简要讨论了当前表述的局限性和进一步工作的方向。 大部分技术证明都收集在附录 A 中。
最大压力算法首先在 Tassiulas 和 Ephremides (1992) 中提出,它考虑了无线网络中数据包传输的路由和调度。
在这种情况下,数据包可能不会同时通过两个干扰链路传输。(在本文的交通环境中,如果车辆可能导致碰撞,则这些车辆可能不会同时移动。)
在分组网络中,已采用term back-pressure policy。
最大压力这个名称可能是由 Dai 和 Lin (2005) 创造的,它似乎是柔性制造网络中调度和路由的首选术语。
有大量关于最大压力或背压算法的文献。
最大压力交通信号控制于 2010 年 6 月在 NSF 动态路线引导和交通控制研讨会上提出(Varaiya,2013 年)。
该版本使用需求、转向比和饱和流量不确定性的网络微积分模型,而不是本文中的随机模型,该模型在 2012 年 9 月 EPFL 的 LATSIS 研讨会上发表。
Wongpiromsarn et al (2012) 独立提出了交通信号的最大压力控制;
然而,该工作中的网络模型和稳定性概念与此处制定的有很大不同
2.确定性流量和固定时间控制
控制问题在两个层次上制定。
第一级处理受 2.1 节所述的路线和守恒约束的确定性车辆流量,
以及 2.2 节所述的交叉路口同时转弯运动和饱和流量的约束。
这种确定性公式导致了可行需求的简单线性规划特征,具有适应可行需求的最小周期长度的固定时间控制以及网络储备容量。 这种表征是已知的。
第二级公式考虑了单个车的运动和交通响应或反馈信号控制。
在第 3 节中讨论。
所以说,这节就是两个约束的说明。
2.1. Routing and flow conservation
总结下来就是一个公式:
f
=
d
P
f=dP
f=dP
没了。
2.2. Phases and control matrices
除了路线和保护约束 (7)和 (8) (路径流量守恒) 之外,还有两个交叉口约束:
1 只允许某些同时转弯运动,2 并且允许的运动受到容量或饱和流量限制。
接下来制定这些约束。
用矩阵表示相位,这个没见过。
3 Queues and feedback signal control
本节回顾单个车辆从一个链接移动到另一个链接的存储转发排队网络模型(store and forward, S&F),并定义了反馈控制稳定的含义。 然后,我们介绍了最大压力 (MP) 控制,并表明 MP 正在稳定并最大限度地提高吞吐量。
就是介绍2个概念:SF MP
3.1. Store-and-forward model
https://zhidao.baidu.com/question/368795706298046764.html
store and forward是现代通信系统中的一种信息传输方式。将需要传送的信息数据分组(或称包),信息分组进入传送节点时先在缓冲存储器暂时“存储”,等待输出线路空闲时进行“转发”、传送出去。

3.2. Max pressure
MP不需要上游的流量信息就能得到当前交叉口的最优控制策略(当
d
∈
D
0
d \in D^0
d∈D0),此时控制策略使得交叉口流量最大化。Theorem 2 证明了该结论,定理2的证明需要借助定理1。
公式(12)可以解释为上游排队长度减去下游排队长度,这是否只适用于单个交叉口信号优化的情况?

**备注3:MP 计算最优解
u
∗
u^*
u∗的流程
4 Variations of MP
本节考虑了 MP 的几种变体。
4.1. Adaptive MP
**定理4:**假设转向率和流率的估计值向真实值收敛,那么当
d
∈
D
0
d \in D^0
d∈D0时,AMP的解
u
^
\hat{u}
u^也是稳定的。
如果测量交叉路口的车辆转弯和放行率,则可以获得估计值。 原则上,外部需求向量
d
d
d 也可以估计。 但这很困难,因为住宅、办公室、购物中心等都有入口链接。由于这些需求随时间变化很大,因此需要对这些入口链接进行检测以进行连续测量。
MP得到稳定解的关键是(任何反馈控制)不等式(A.6)
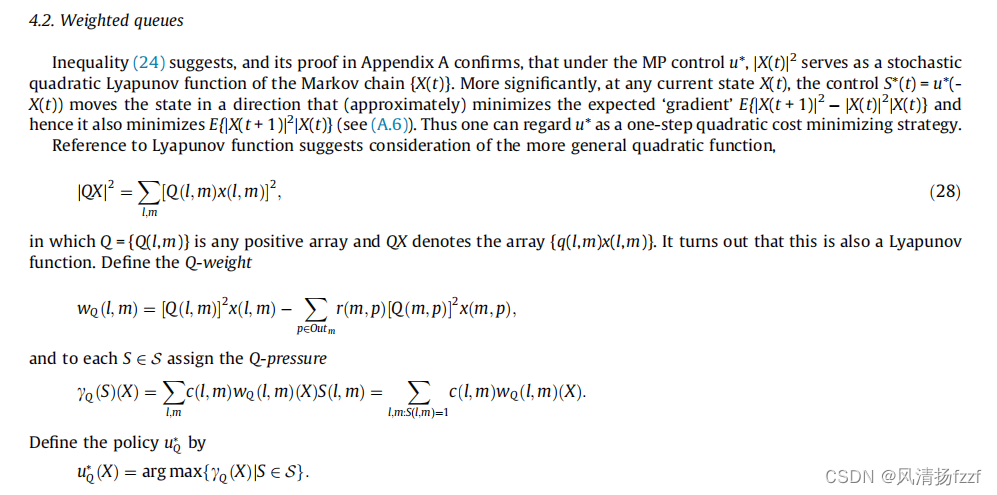
4.2. Weighted queues
这里涉及的数学知识很多: 什么是李雅普诺夫函数 | 集智百科 随机二次lyapunov函数、 markov chain等等
Thus one can regard
u
^
\hat{u}
u^ as a one-step quadratic cost minimizing strategy.-------->因此,可以将
u
^
\hat{u}
u^ 视为一步二次成本最小化策略。
这里又多了一个
u
Q
∗
u{^*_Q}
uQ∗,得看懂这个,就是Lyapunov Function和Markov Chain这两兄弟。
看不太懂,直接放截图…
 还是那句话,
u
Q
∗
u{^*_Q}
uQ∗也是稳定控制。文章中有证明
还是那句话,
u
Q
∗
u{^*_Q}
uQ∗也是稳定控制。文章中有证明
4.3. Invoking MP once per cycle
基本 MP 控制 (23) 在每个周期(period)开始时改变,可能很小。
例如,SCOOT、OPAC、RHODES 和 Xie et al(2012) 每隔一秒左右就决定是继续一个阶段还是切换到另一个阶段。
请注意,与这些其他方案相比,MP 计算只需要很小的计算量。
从实现的角度来看,可能希望以控制周期(period)为相位循环周期(cycle),以便MP信号控制每个周期(cycle)只改变一次。由于未指定控制周期(period),上述结果继续成立。
但是,每个周期(cycle)仅调用(invoke)一次 MP 可能会导致不良行为。例如,考虑一个需求非常不平等的孤立十字路口。
还假设每个阶段驱动一个单相并且所有饱和率是平等的。然后在任何周期(cycle)中,MP 将启动队列长度最长的阶段,这通常是需求最大的阶段(phase)。只有当它的队列长度变得最大时,需求最少的阶段才会被启动。因此,该队列中的车辆将等待几个周期,这可能是不希望的。
这里主要是给服务率
λ
S
\lambda_S
λS添加了约束,使得不会发生排队溢出现象。
定理6:当需求
d
∈
D
m
i
n
,
0
d \in D^{min,0}
d∈Dmin,0时,
u
m
i
n
,
∗
u^{min,*}
umin,∗是稳定控制。
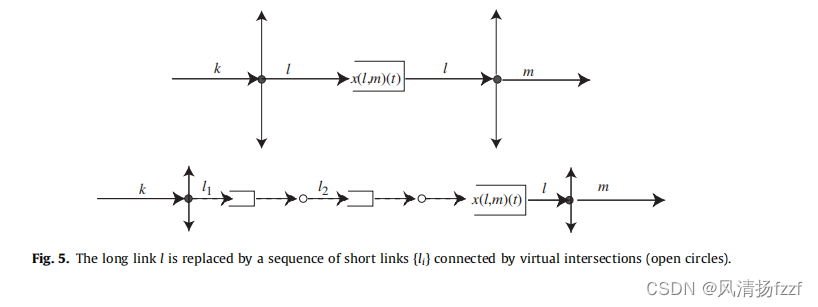
4.4. Long links
问题:在模型中,阶段 (l,m) 的驱动允许车辆在一个周期内从队列 (l,m) 移动到队列 (m,p)。 如果链路 l 或 m 与另一个链路相比非常长,这显然是不现实的。 也就是说,模型忽略了链路行程时间。 这个限制很容易通过用几个链接替换一个长链接来克服。 在图 5 中。
解决:将long links分解为多个单进单出的short links。
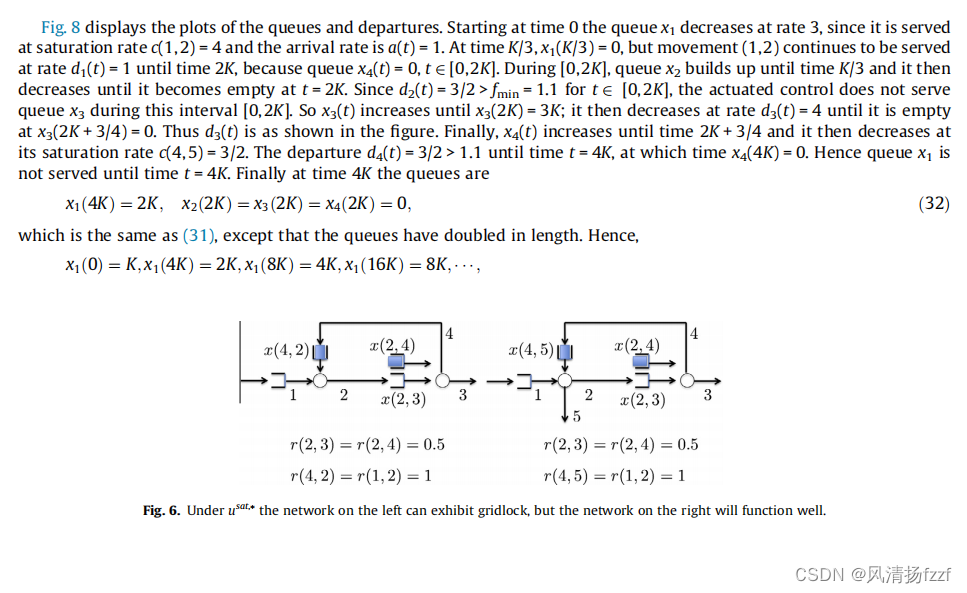
4.5. Saturated links
图 4 中的队列是“垂直的”,容量不受限制,就像在许多存储转发队列模型中一样。 因此,该模型不允许阻止车辆从上游链路移动的下游链路饱和。 这是一个限制。 在更新方程中对阻塞建模很简单 (18)。
只要相位
S
(
l
,
m
)
S(l,m)
S(l,m)被激活了,那么
x
(
l
,
m
)
x(l,m)
x(l,m)就是递减(decremented)的。
但是,如果堵住了,他就不对了啊。
这里加一个相位
S
(
l
,
m
)
S(l,m)
S(l,m)没有被激活时,
L
(
l
,
m
)
L(l,m)
L(l,m)的约束。
但是这里的
u
s
a
t
,
∗
u^{sat,*}
usat,∗不一定是稳定控制啊?因为左边这个图,我已经动不了了。
4.6. Coordinated intersections
本文中的讨论仅限于拆分的确定,即一个周期内每个**阶段(stage)**的持续时间。 循环时间本身和偏移量必须通过其他方式确定。 有关讨论,请参见 Aboudolas 等人 (2009a)。
Aboudolas, K., Papageorgiou, M., Kosmatopoulos, E., 2009a. Store-and-forward based methods for the signal control problem in large-scale congested urban road networks. Transportation Research, Part C 17, 163–174.
5 Counter-examples
We present examples of reasonable control strategies, which, however, are de-stabilizing.
我们提供了一些合理地控制策略的例子,然而,这些策略是不稳定的。
5.1. Full actuation
考虑一种“完全启动Full actuation”控制,其中在任何交叉路口,每个阶段仅启动一个运动,因此以指定的饱和率服务于一个队列。
示例4

备注 5: 此示例中的控制似乎与 Xie等人 (2012) 研究的进度驱动交叉口控制 (SchIC) 相同。 这种完全启动控制的不稳定性与启动阶段 1(或 2、3、4)的时间量无限制地增长有关。 因此,可以通过施加“最大绿色”来消除不稳定性——当另一个相位具有非零队列时,一个相位可以连续启动的最长时间。
在实践中,一个人总是有一个最大的绿色。 但是,对该示例的更详细研究表明,最大队列长度将随着最大果岭的增加而增加。
此示例表明,如果网络具有如图 7 所示的“循环”,则完全驱动的控制会导致较大的延迟。
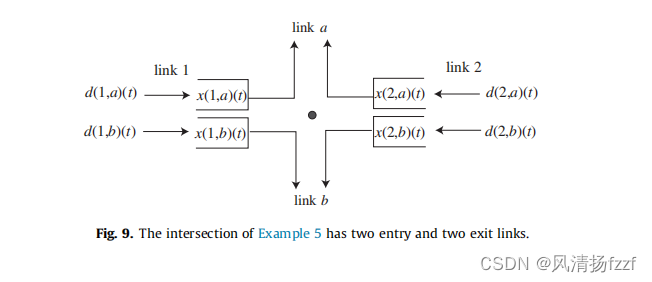
5.2. Isolated intersection
示例 5 和 6 中的控制器是工作守恒的,即只要某些队列非空,就不会出现“浪费”的绿色。 Varaiya (2013) 表明,如果一个阶段(stage)仅驱动一个阶段(phase),则每个隔离交叉口的工作守恒控制器都会稳定下来。
示例5、示例6
6 Discussion
本文介绍了信号网络的最大压力 (MP) 控制。 它具有三个优点。
首先,MP 是局部的:交叉口的控制仅取决于相邻路段的队列长度。 因此,MP 通信要求较低,可以在不改变其他交叉口控制的情况下添加交叉口。
其次,MP 根据需求的变化自适应地调整拆分或阶段持续时间,而无需预测或估计这些需求。
MP 需要得到确切地转向比和饱和流速,但如果可以估计这些参数,则可以有效地使用自适应 MP。
这篇论文的主要贡献是理论上的。证明了 MP 是稳定网络的,即保持有界队列长度,如果网络可以通过任何控制来稳定的话。
这种稳定性保证不适用于已发布的自适应控制器,例如 SCOOT 或 ACS-Lite。
在看似合理的自适应控制器的示例中提供了一个指导性的理论贡献,即使存在稳定的固定时间控制器,这些控制器也会失稳。
这些例子强调了划定应用范围的重要性,在该应用范围内,提出的自适应控制器可以保证稳定性。
虽然其结果在理论上很有吸引力,但该研究的局限性也需要强调,因为它们可能为进一步的工作指明方向。
对点队列模型的一个常见反对意见是,与真实道路上的队列不同,点队列不占用空间。
然而,队列占用的空间可以直接近似为队列长度乘以车辆的平均长度,如第 4.5 节所述。
这导致了该模型的最大局限性:它假设每个链路中的存储容量是无限的。
如果一个链接只能容纳有限的队列,那么即使该运动被启动,某些运动也可能被阻止——有时称为“事实上的红色:de facto red”。
由于完全不同的原因,可能会出现链接饱和和阻塞。 定时计划不满足不等式 (10) 的 FT 控制器将导致无界队列,即使正确定时的 FT 控制器将稳定网络。 当然,在这种情况下,MP 会稳定网络。
请注意,除非在整个网络中测量需求,否则无法得出链路饱和是由于过饱和流量条件(即“需求超过容量”)而导致,参见 Wu 等人 (2010),其中测量用于确定简单线性网络中的过饱和。
如果需求过多,即如果proposition2中的(12)没有解,链接的饱和总是会发生。
在这种情况下,人们可能希望使用一种控制策略来防止某个保护区内的饱和,该控制策略将过度需求保持在该区域之外。
Ekbatani 等人 (2012)、Aboudolas 和 Geroliminis (2013) 研究了这种“门控策略”。
门控策略可能是非局部的,因为一个链路中的饱和需要限制与饱和链路不共享交叉点的入口链路中的需求。 MP 不直接允许这种非局部门控策略。
然而,在 Ekbatani 等人 (2012)、Aboudolas 和 Geroliminis (2013) 中,保护区本身由一个由所谓的网络基础图 (NFD) 建模的单个链路表示,因此入口链路与该链路相邻并且 ,原则上可以使用MP。 这是另一个值得研究的方向。
Giaccone et al (2005) 中的 MP 策略正是这样一种非局部门控策略。
如果车道具有共享运动,例如直行运动和允许的左转,则可能会发生阻塞而不饱和。
在这种情况下,左转运动可能会阻挡下一个想要通过运动的车辆。效果是降低此类运动的饱和流速。在本研究中假设每个运动都有一个单独的队列,这种“排头”阻塞是不允许的。
可以在“输入缓冲开关 input-buffered switches”的研究中评估由于线头阻塞而导致的饱和流速降低(McKeown 等,1993)。















 896
896











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









