








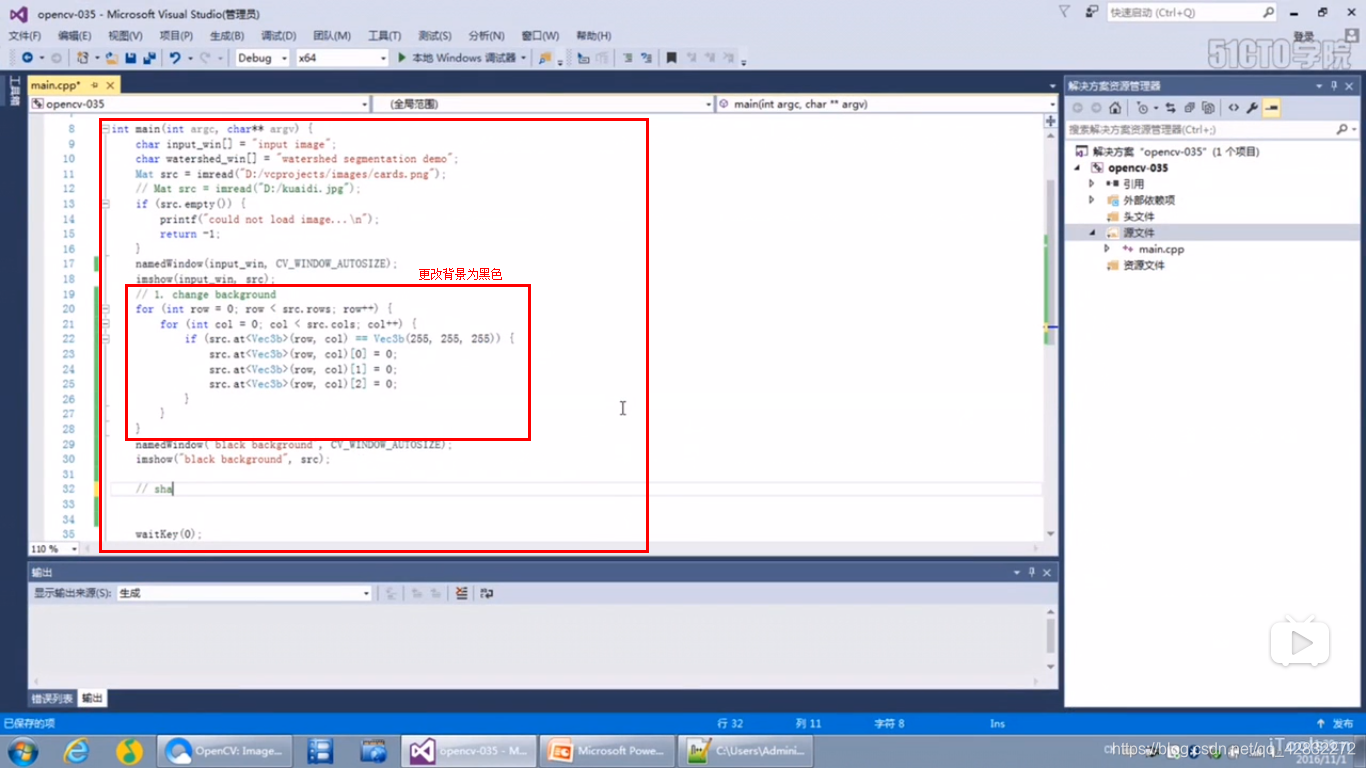
测试代码
#include "pch.h"
#include <iostream>
#include<opencv2/opencv.hpp>
using namespace cv;
using namespace std;
int main(int argc,char** argv)
{
Mat image, src;
src = imread("D:\\2.jpg");
if (src.empty())
{
cout << "could not load the picture...\n" << endl;
return -1;
}
namedWindow("src",WINDOW_NORMAL);
imshow("src", src);
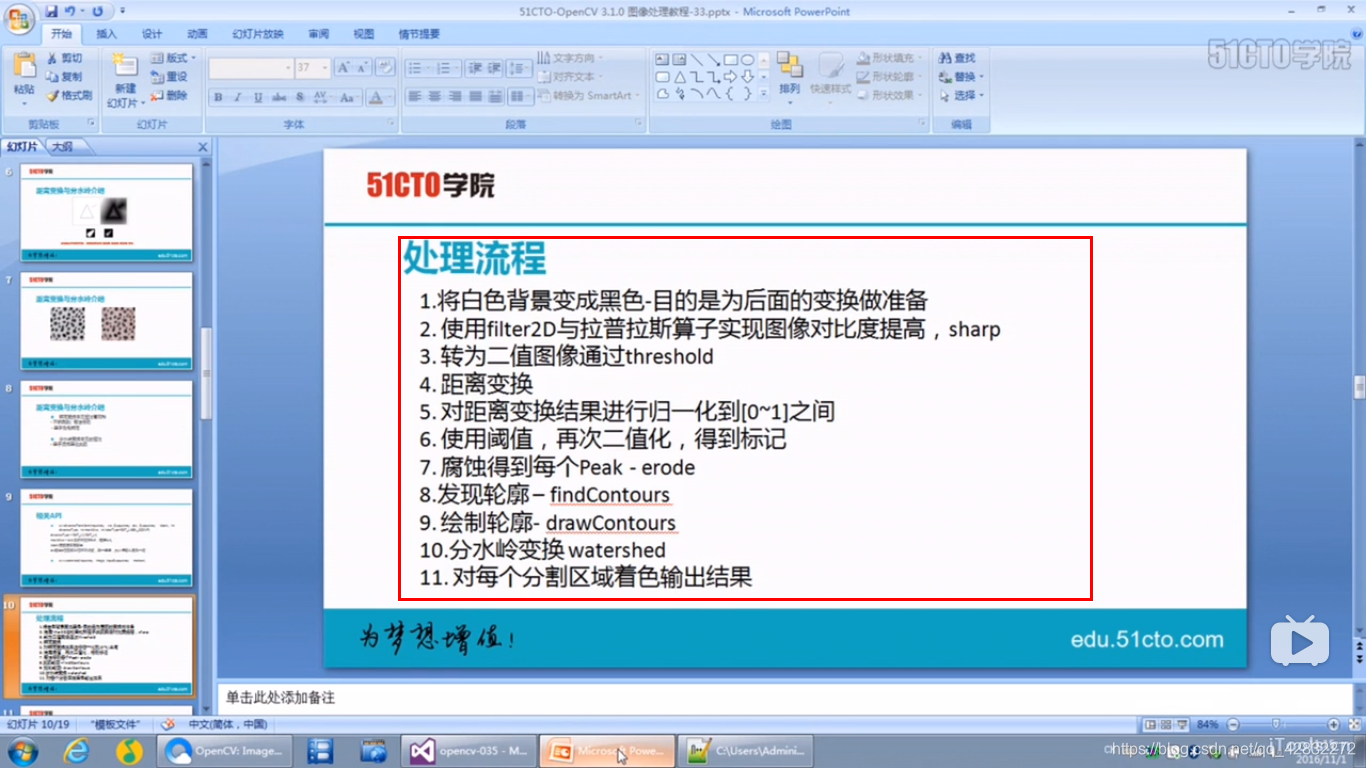
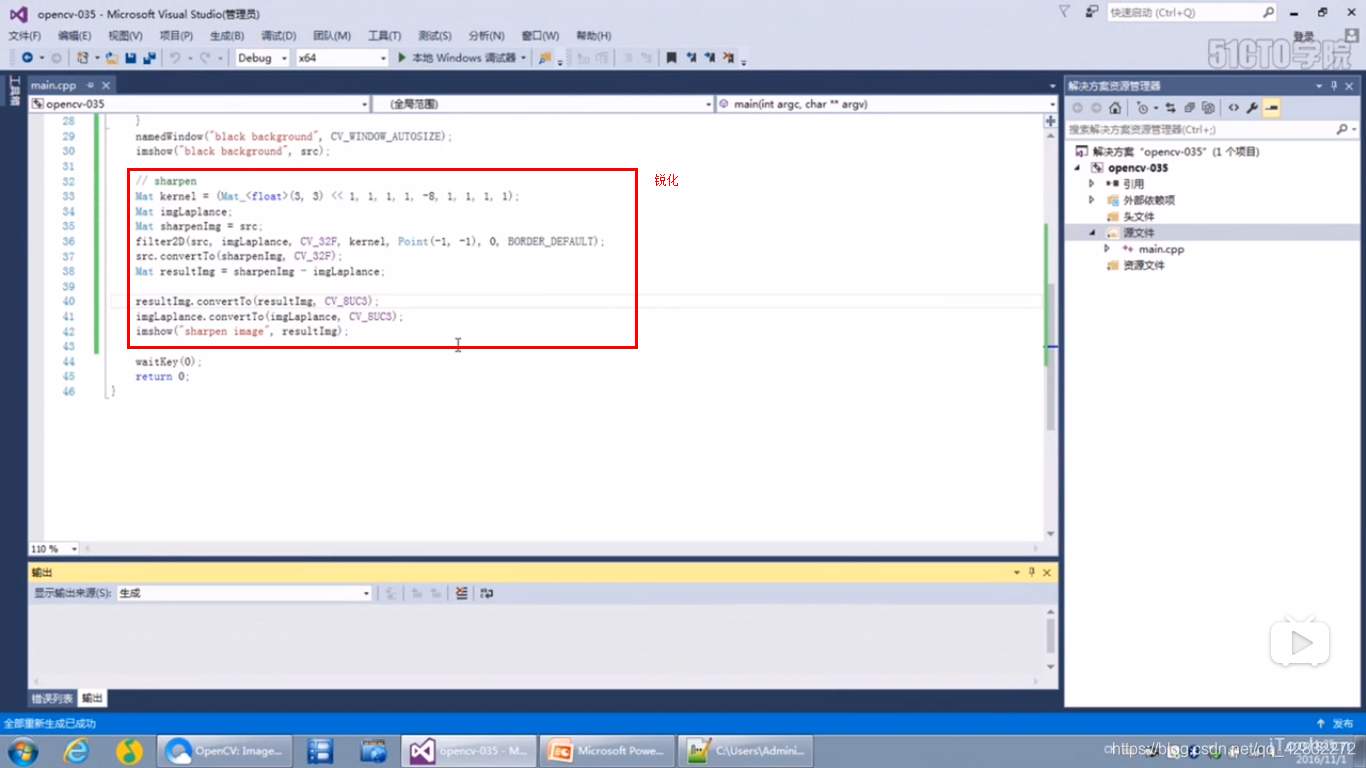
//锐化。
Mat kernel = (Mat_<float>(3, 3) << 1, 1, 1, 1, -8, 1, 1, 1, 1);
Mat imgLaplance;
Mat sharpenImg = src;
filter2D(src, imgLaplance, CV_32F, kernel, Point(-1, -1), 0, BORDER_DEFAULT);
//convertTo用于数据类型之间的转换,由原来的 UCHAR 变为了 CV_32F
src.convertTo(sharpenImg, CV_32F);
Mat resultImg = sharpenImg - imgLaplance;
resultImg.convertTo(resultImg, CV_8UC3);
imgLaplance.convertTo(imgLaplance, CV_8UC3);
imshow("sharpen image", resultImg);
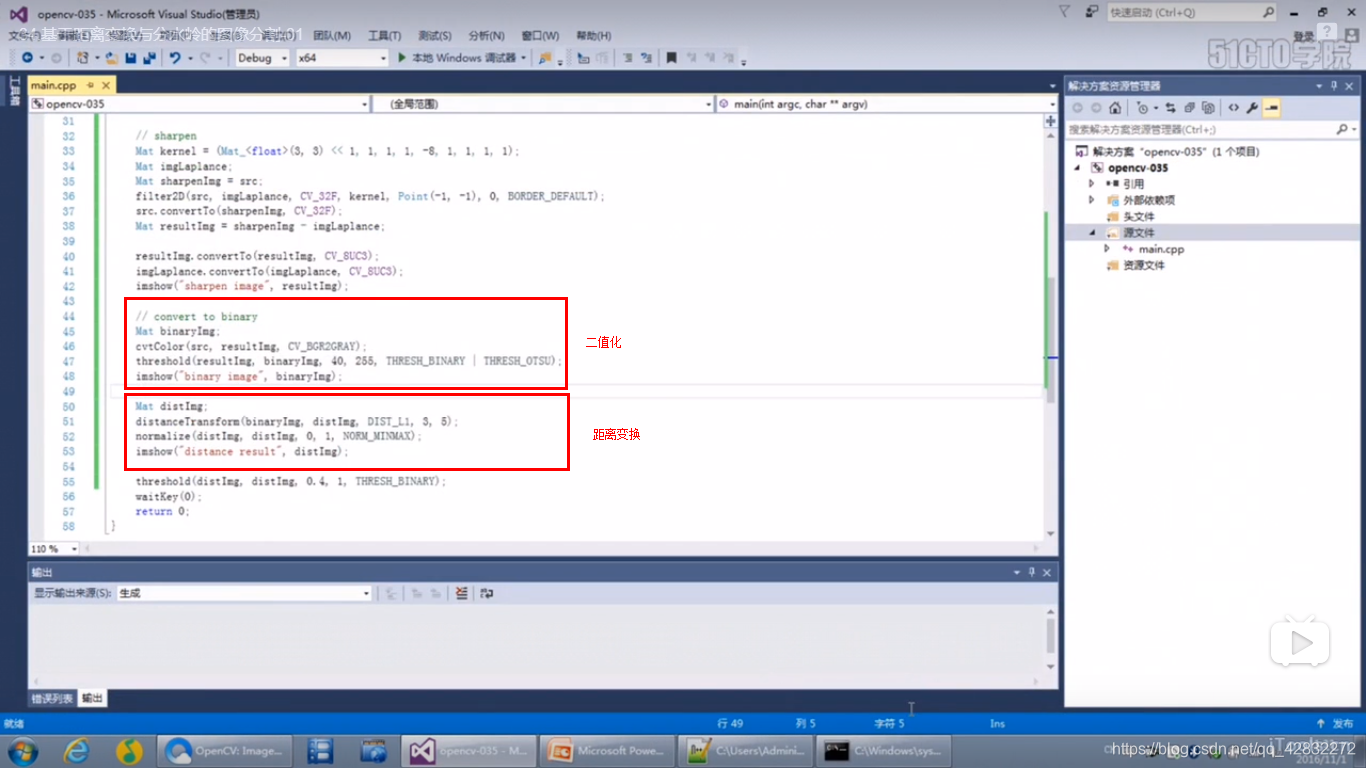
//二值化
Mat binaryImg;
cvtColor(resultImg, resultImg, CV_BGR2GRAY);
threshold(resultImg, binaryImg, 40, 255, THRESH_BINARY | THRESH_OTSU);
imshow("binary iamge", binaryImg);
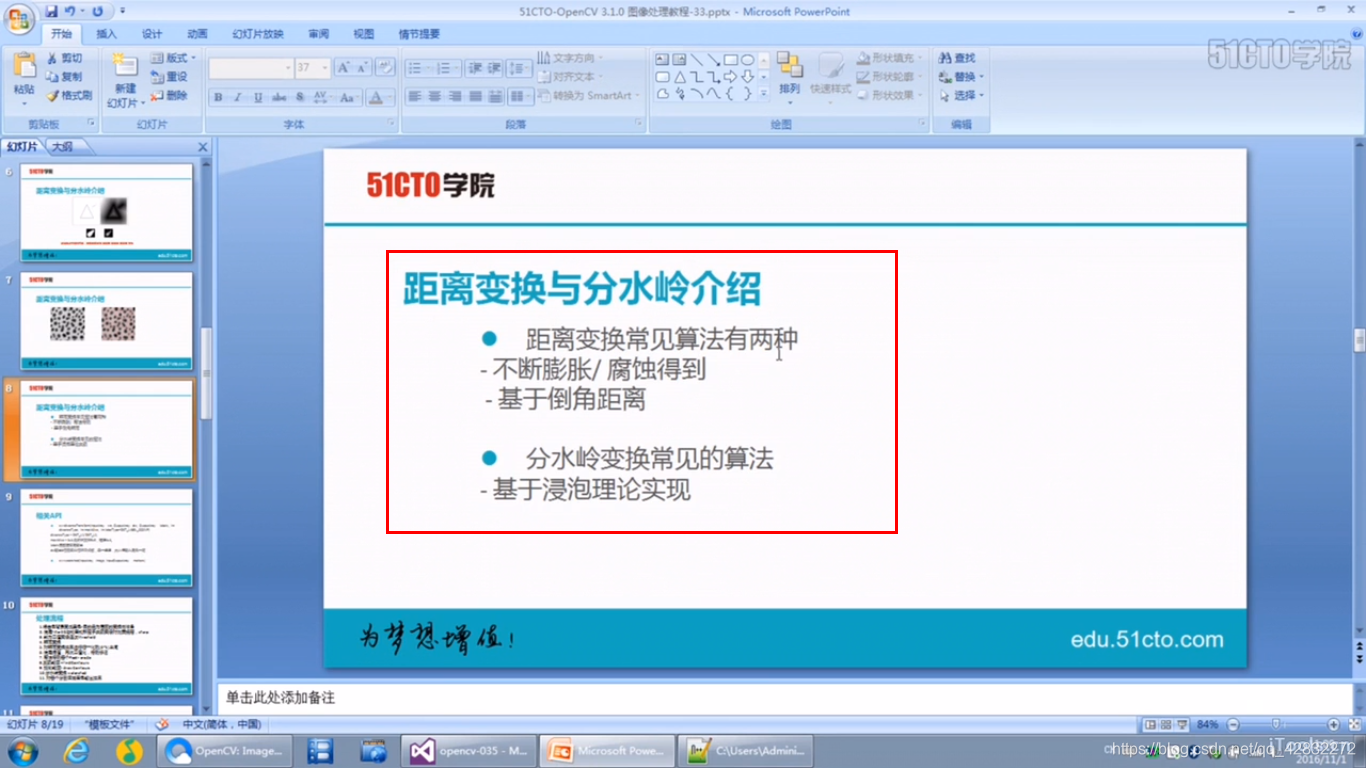
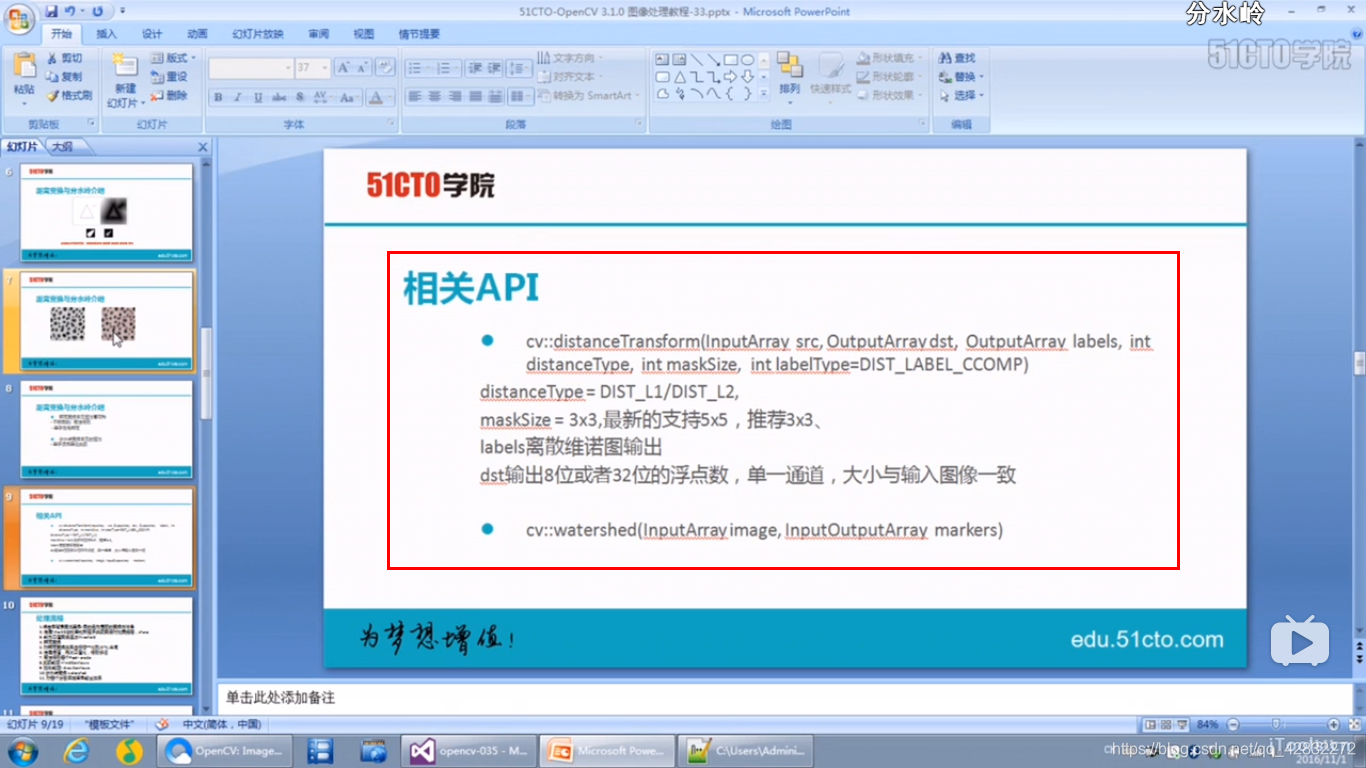
//距离变换distanceTransform方法用于计算图像中每一个非零点距离离自己最近的零点的距离,distanceTransform的第二个Mat矩阵参数dst保存了每一个点与最近的零点的距离信息,图像上越亮的点,代表了离零点的距离越远。可以根据距离变换的这个性质,经过简单的运算,用于细化字符的轮廓和查找物体质心(中心)。可以根据距离变换的这个性质,经过简单的运算,用于细化字符的轮廓和查找物体质心(中心)。
Mat distImg;
distanceTransform(binaryImg, distImg, DIST_L1, 3, 5);
//normalize归一化
normalize(distImg, distImg, 0, 1, NORM_MINMAX);
imshow("distance result", distImg);
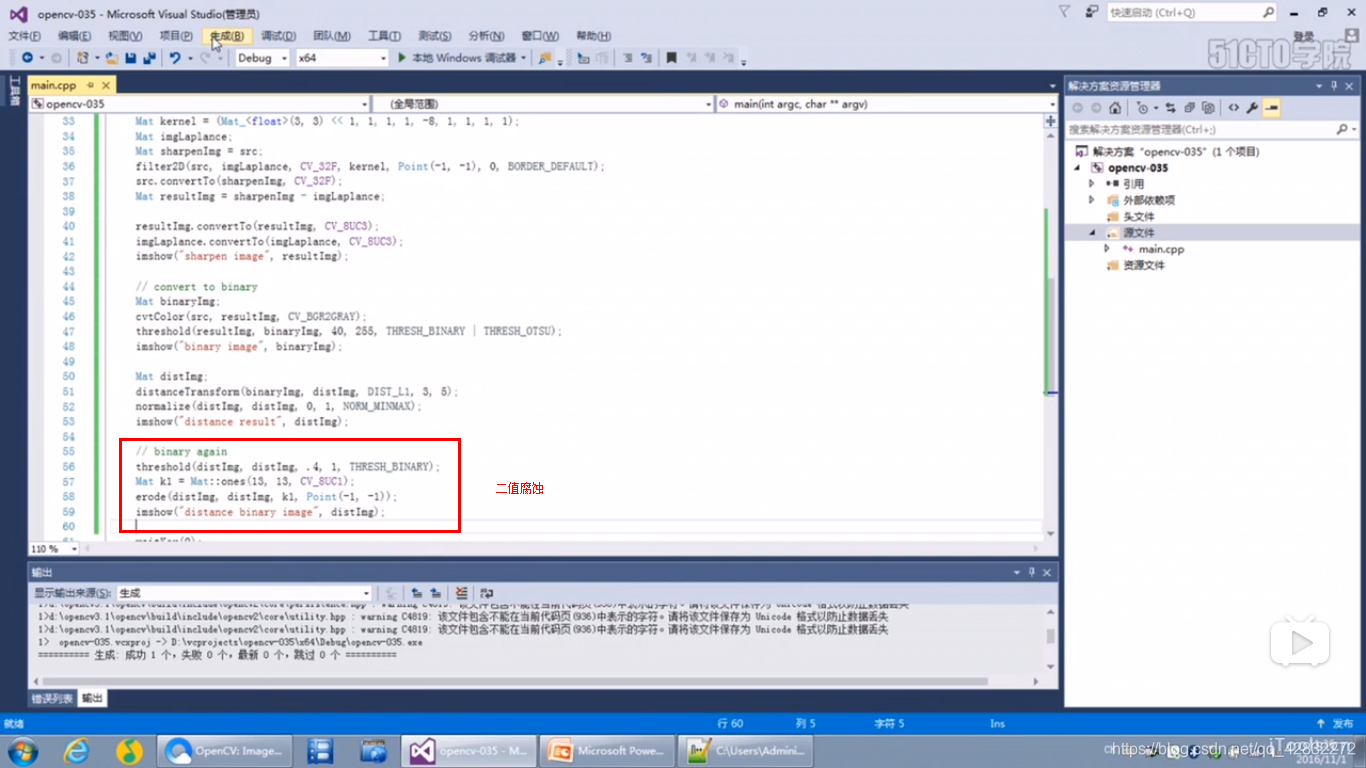
//腐蚀
threshold(distImg, distImg, 0.4, 1, THRESH_BINARY);
Mat k1 = Mat::ones(3, 3, CV_8UC1);
erode(distImg, distImg, k1, Point(-1, -1));
imshow("distance binary image", distImg);
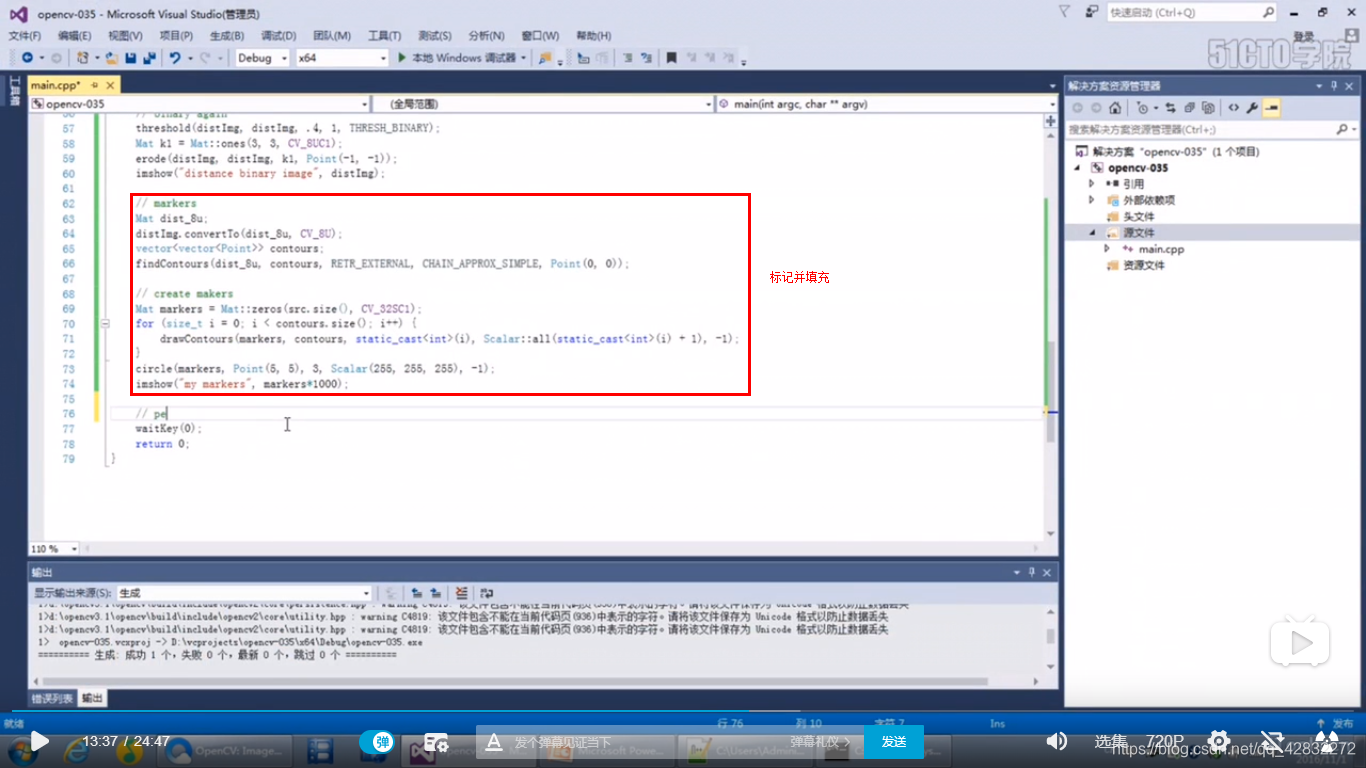
//标记并填充 标记时有问题,不能处理完图像,以上操作没有问题
Mat dist_8u;
distImg.convertTo(dist_8u, CV_8U);
vector<vector<Point>> contours;
//findContours寻找物体轮廓
findContours(dist_8u, contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE, Point(0, 0));
Mat markers = Mat::zeros(src.size(), CV_32SC1);
for (size_t i = 0; i < contours.size(); CV_32SC1)
{
drawContours(markers, contours, static_cast<int>(i), Scalar::all(static_cast<int>(i) + 1), -1);
}
circle(markers, Point(5, 5), 3, Scalar(255, 255, 255), -1);
imshow("my markers", markers * 1000);
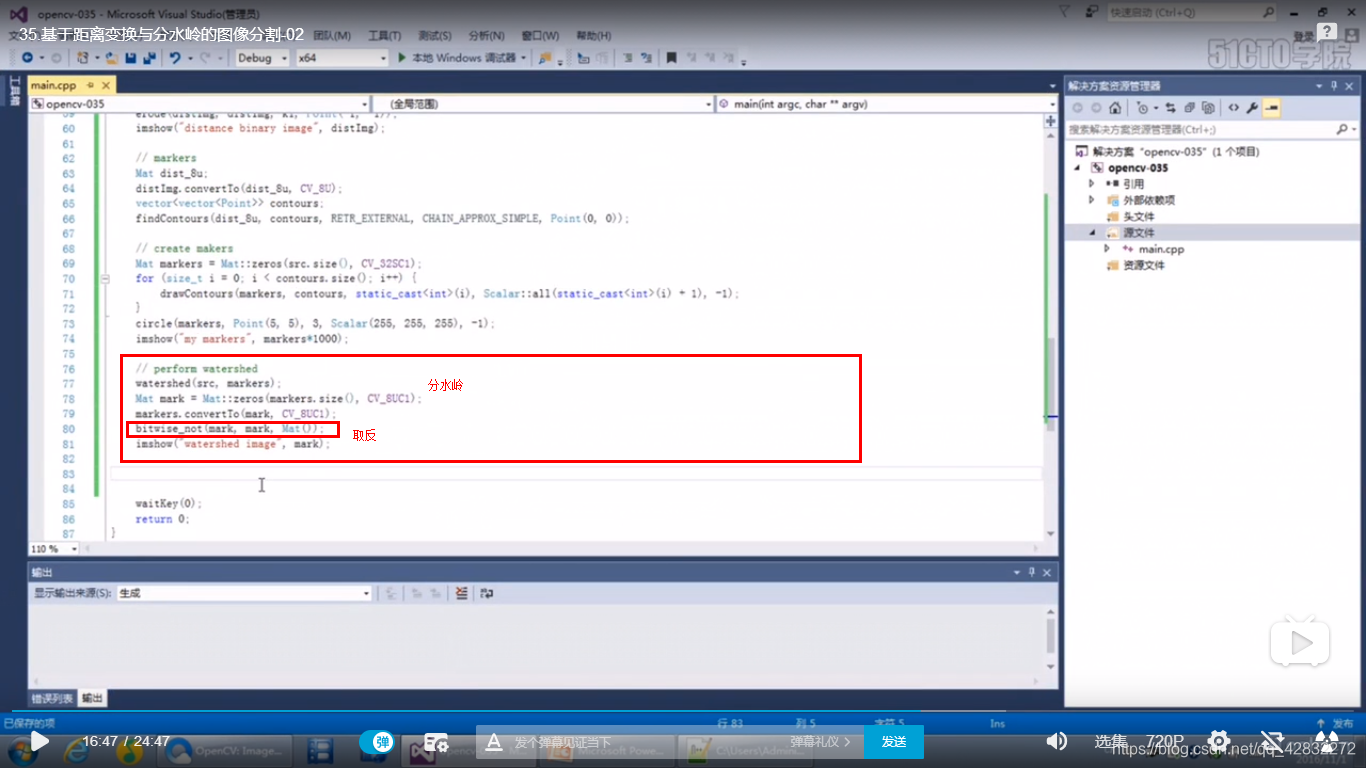
//分水岭
watershed(src, markers);
Mat mark = Mat::zeros(markers.size(), CV_8UC1);
//取反
bitwise_not(mark, mark, Mat());
imshow("watershed image", mark);
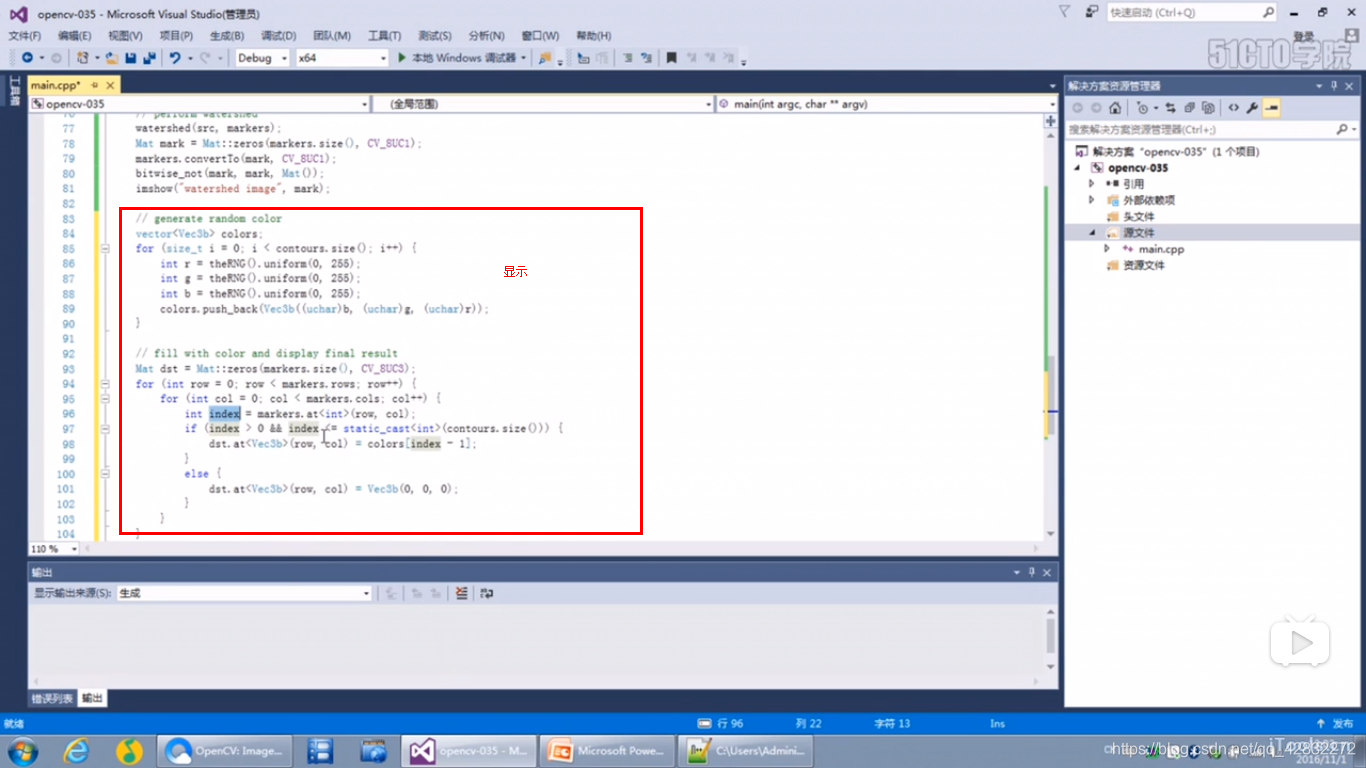
vector<Vec3b>colors;
for (size_t i = 0; i < contours.size(); i++)
{
int r = theRNG().uniform(0, 255);
int g = theRNG().uniform(0, 255);
int b = theRNG().uniform(0, 255);
colors.push_back(Vec3b((uchar)b, (uchar)g, (uchar)r));
}
Mat dst = Mat::zeros(markers.size(), CV_8UC3);
for (int row = 0; row < markers.rows; row++)
{
for (int col = 0; col < markers.cols; col++)
{
int index = markers.at<int>(row, col);
if (index > 0 && index <= static_cast<int>(contours.size()))
{
dst.at<Vec3b>(row, col) = colors[index - 1];
}
else
{
dst.at<Vec3b>(row, col) = Vec3b(0, 0, 0);
}
}
}
imshow("dst", dst);
waitKey(0);
return 0;
}
OpenCV之bitwise_and、bitwise_not等图像基本运算及掩膜
https://blog.csdn.net/u011028345/article/details/77278467














 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









