







有a坐标系,b坐标系:
坐标变换: 一般描述为源坐标系与目标坐标系。
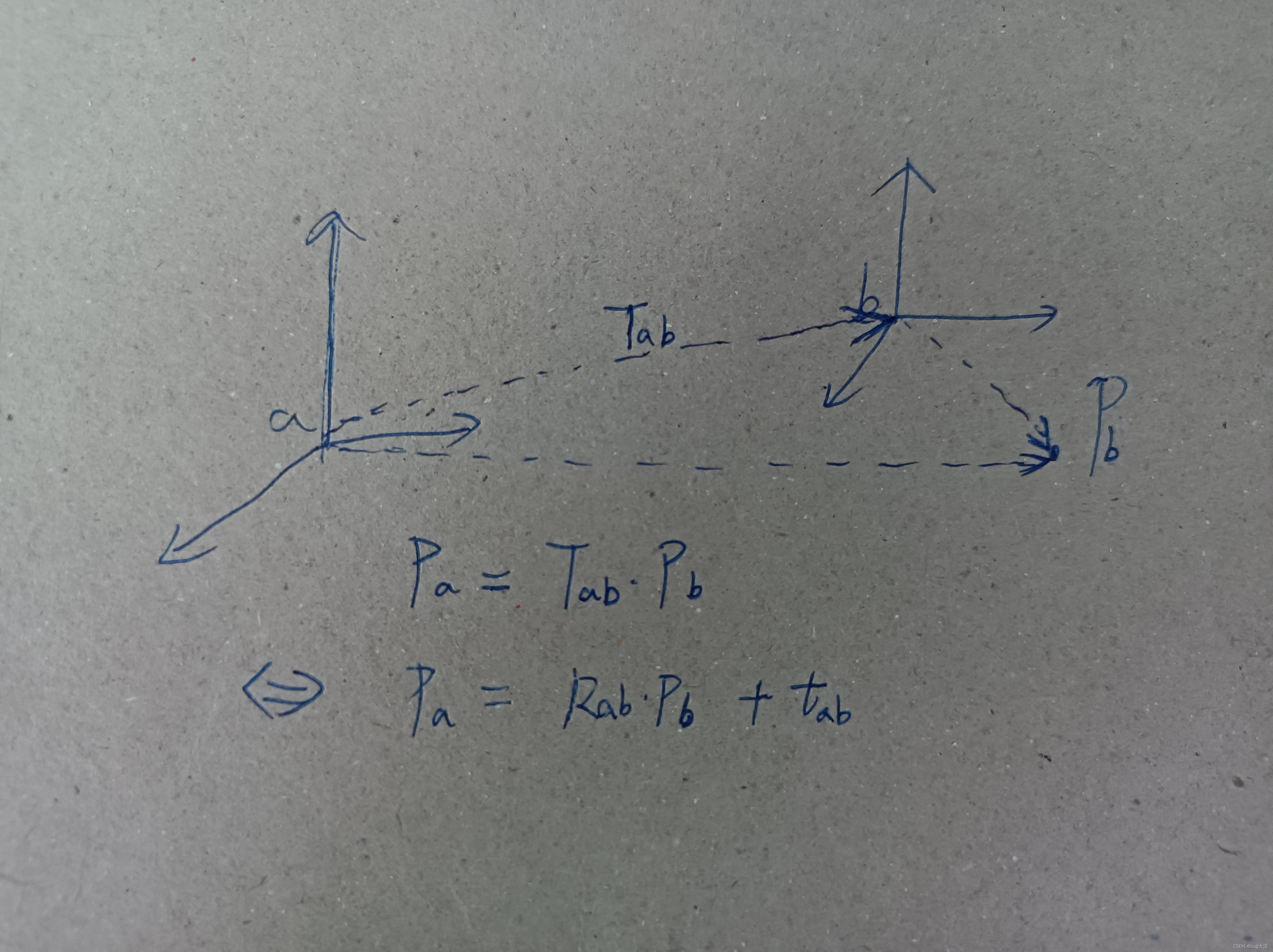
坐标系变换:一般描述为父坐标系和子坐标系。
1、a到b的坐标变换矩阵,一般记为Tba,表示将a坐标系下的点如何变换到b坐标系(左乘该矩阵)。
2、a到b的坐标系变换矩阵,一般记为Tab,表示a以自己为基坐标系,如何变换到b的。也可以说,表示b坐标系在a坐标系下的位姿。
另外: 常用ros的小伙伴,可以知道,ros提供的tf树,坐标监听,拿到的是 父到子的坐标系变换。
如果需要大量坐标转换的话,还是建议自己手动Eigen去转,ros的tf树效率并不那么好。
2D平面的不同坐标系间的位姿转换:(以机器人坐标系和地图坐标系为例)
机器人坐标系点转到地图下的点的变换矩阵(绕yaw的旋转矩阵):T =
cosx -sinx 0
sinx cosx 0
0 0 1
其中x是,机器人坐标系在地图坐标系下的偏航角.(旋转方向的定义:该轴的正向往逆向看去,逆时针方向即为角度正方向)。
欧拉角和四元数在线可视化工具:Quaternions - Visualisation















 972
972











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









