






多目标码头间集卡路径规划
Multi-objective inter-terminal truck routing
作者:Leonard Heiliga,Eduardo Lalla-Ruiza,Stefan Voß
摘要
集装箱贸易的巨大增长给城市港口地区带来了严重的交通问题,对效率和污染都产生了负面影响。在本文中,我们通过具体考虑集卡排放来解决多目标码头间卡车路径问题。我们提出了一种高效的多目标存档模拟退火方法(archived simulated annealing approach)和可视化技术。管理见解是在权衡分析的基础上讨论的。该算法被嵌入到一个基于云的决策支持系统(cloud-based decision support system)中,以考虑上下文数据(contextual data),包括交通数据和卡车的当前位置。这使得港口在解决环境问题的同时,可以利用数字化和优化的潜力。
1 引言
港口的经济和环境可持续性是指在以对环境负责的方式行事的同时,提高港口在效率、生产力、安全和安全方面的表现。全球许多港口都发布了港口发展计划和战略,要求采取措施减少港口对周边社区的环境影响 (见Hamburg Port Authority, 2012;NSW Ports, 2014;Port of
Rotterdam Authority, 2016)。减少噪声和排放是许多港口的主要优先事项之一,特别是在那些受港口周围城市化地区影响的港口。由于港口内部和港口之间的激烈竞争,重要的是利益相关者不仅要从生态角度理解绿色解决方案的积极影响,而且要看到有关经济绩效的积极协同效应。因此,支持绿色港口战略实现经济和环境目标的创新实践、流程和方法是行业所需要的,并有助于可持续增长和发展(Lam和Van de Voorde,2012)。尽管需要经济上可行的绿色解决方案,但近年来港口物流领域对环境可持续性的关注很少,特别是在港口活动的优化方面。虽然可持续性可以被定义为“既满足当代人的需求,又不损害子孙后代满足其自身需求的能力的发展”(布伦特兰,1987),环境可持续性是指支持这一发展的原则和做法,一方面假设资源的生产和选择是生态友好的,另一方面假设资源的有效利用、废物的处理和温室气体(GHG)的减少,以避免(即:减轻)对后代的负面影响(Goodland, 1995)。在这方面,空气污染是港口的主要环境影响之一,特别是集装箱和货物的内陆运输卡车(Lam和Van de Voorde, 2012)。相当一部分与港口有关的运输和交通是由码头间运输产生的,码头间运输指的是在一个海港内组织分隔的区域之间移动集装箱和货物的任何一种陆海运输(Heilig and Voß, 2017)。鉴于港口行业在这方面日益增长的需求,重要的是扩大ITT的这条研究线,这条研究线在过去几年得到了越来越多的关注,不仅考虑经济角度,还考虑环境角度。
虽然只有少数的环境可持续性研究纳入了信息系统的观点,但它可以在塑造组织实践和过程中发挥关键作用,改善经济和环境绩效(Melville, 2010)。在当今的数字时代,一个有希望影响组织实践和过程,以实现经济和环境的可持续性的方法是广泛利用信息系统中的数据。不仅可以发现和释放创造业务价值的隐藏潜力,还可以衡量和理解行为对环境的影响。在现代港口,自20世纪60年代集装箱化以来,创新信息系统的发展对港口运营产生了重大影响(Heilig等人,2017b)。从这个意义上说,跨学科研究需要从数据中获得有价值的见解,以推动决策和行动。商业分析作为一门新兴的研究领域,致力于将涉及技术创新、定量方法和决策等各个方面的相关领域和学科结合在一起。如图1所示,研究界假设了综合方法,结合了来自信息系统、运筹学和机器学习的原则和方法。尽管港口行业对这类解决方案非常感兴趣,在智能港口和数字港口的框架下讨论,据我们所知,目前在工业和研究领域还没有包含所有这些维度的方法和具体解决方案(有关现代海港信息系统的概述,请参阅海利格和沃斯,2016)。在最近的一项文献调查中,Mansouri等人(2015)进一步指出,多目标优化作为决策支持系统的一部分,在考虑环境可持续性的情况下帮助海事行业做出知情和及时的决策,在理论发展和实施方面存在差距。在这方面,Dekker等人(2012)强调了多准则决策分析对识别和分析经济和环境方面的权衡的重要性。

在本文中,我们提出了一种新的业务分析方法(business analytics approach)来解决码头间集卡路径问题,同时考虑了经济和环境视角,解决了Mansouri等人(2015)指出的的研究空白。在借鉴前人工作的基础上,我们提出了一个基于移动云平台的实时决策支持系统(real-time decision support system based on a mobile cloud platform),该系统集成了机器学习和运筹学的方法来驱动决策和行动。在这方面,它是第一种考虑微观排放计算和实时上下文信息(real-time contextual information)的多目标优化方法来解决码头间集卡路径问题。从而评估不同目标之间的协同效应和冲突,为港口物流可持续发展领域的决策提供决策支持系统。我们表明,使用我们的方法可以帮助港口行动者减少碳足迹,同时增加经济效益。此外,还讨论了与车队组成、卡车数量和空行程有关的权衡。更具体地说,本文的主要贡献如下:


- 我们提出了一个综合方法,以支持复杂的车辆路径决策的港口相关的跨码头卡车作业。在港口的环境可持续性方面,我们的方法是创新的,在一种方式上,经济和环境因素被详细考虑,以优化港口相关运输网络的运输流。在这方面,我们发现缺乏在日常运作中考虑环境可持续性方面的研究(见表1第2.2节)。特别是在受交通和空间有限影响的港口地区,我们需要创新的方法,以更好地配合现有能力的需求。在这方面,我们表明,我们的方法不仅可以降低成本和排放,还可以提高卡车的利用率,减少空车。使用我们的方法,决策者和实践者能够更好地分析权衡,并根据他们的成本水平和环境需求选择解决方案。为此,除了提出一种优化方法外,我们进一步开发了一种新的二维三元可视化方法,以确保相关决策过程的实用性。环境
- 作为决策的角度来看,我们鉴于ITT的具体需求和限制,将Heilig et al,(2017)提出的码头间集卡路径问题(inter-terminal truck routing problem,ITTRP)扩展为一个多目标问题,该问题以最小化车辆的可变和固定成本和温室气体排放为目标。为了求解Green-ITTRP问题,我们提出了一种基于模拟退火的多目标优化算法,与贪婪启发式算法相比,该算法能够提供可行的、高度改进的ITT路径。利用超体积指标(hypervolume indicator)和Friedman非参数统计检验(Friedman nonparametric statistical test),我们进行了大量的实验,以确定合适的参数,提出的算法。为了评估我们的方法的贡献,我们使用德国汉堡港的真实地点,对一组定义明确的问题实例进行了全面的计算实验。模拟退火的多目标优化算法
- 在信息系统部分,我们将提出的解决方案集成到一个基于云的决策支持系统中。移动云平台支持实时调度程序之间的交互和卡车司机基于移动应用。因此,它不仅是可能的同步的新规划结果与各自的卡车司机加强信息流动,而且还考虑从每个司机相关的数据(contextual data),比如他们的实际位置和状态,以提高调度的准确性。除其他功能外,优化组件可作为软件即服务(SaaS)解决方案提供,卡车司机只需安装移动应用程序即可参与。在这个意义上,我们提供一个跨学科的研究,主要研究信息系统之间的接口和操作研究,不仅考虑物流计划和控制的需求,而且目前观察到对实时通信的需求和集成在港口行业(见,例如,Heilig et al .,2017 b)。信息系统与实时通信
- 在机器学习方面,我们部分使用外部预测服务(external forecasting services)。在求解方法中,我们集成了k-均值聚类(k-means clustering)来对类似的非支配解(non-dominated solutions)进行分组,以使该方法对决策者更具可用性和可管理性。此外,平台的优化组件使用真实的地图数据,并与外部交通信息服务集成,提供交通状况预测。因此,旅行距离和旅行时间可以更准确地考虑。据我们所知,在相关的优化方法中还没有考虑到实时信息和预测的整合。聚类、实时信息和交通状况预测预测
2 相关研究
2.1 码头间运输(Inter-terminal transportation)
虽然运筹学文献的主要部分集中在集装箱码头内活动的优化上(有关广泛的概述,请参见Steenken等人,2004年;Stahlbock和Voß,2008年),但近年来,码头间运输(ITT)的优化在学术界和实践中受到越来越多的关注年。ITT的需求可能有不同的原因。除了规划限制导致港口内不需要但需要的运输外,主要原因之一是通过有效连接和共享辅助设施(如当局、普通驳船和铁路码头等)、增值服务(VAS)设施,更好地利用港口环境中的可用空间,以及与港口相关的工业和物流区(也称为配送区)。Heilig和Voß(2017)提供了广泛的ITT文献综述,并提出了几个研究方向。概述表明,在拟议的优化和模拟模型中,目前未考虑ITT运营的环境因素。ITT规划的优化模型主要旨在提供决策支持,以根据不同的交通需求选择成本和迟到罚款最小化的交通方案(参见Duinkerken等人,2006年;Tierney等人,2014年)。最近,协作规划(Kopfer等人,2016年)和车辆共享(He等人,2013年)被视为ITT优化的一种手段。在Heilig等人(2017a)中,ITTRP作为一种新的车辆路径问题以及两种贪婪启发式和两种混合模拟退火(SA)算法被提出,以通过最小化卡车运输成本更好地协调港口参与者。尽管这些以成本为导向的方法可能由于更好地利用车辆、减少空行程或缩短行程距离而间接导致减排,但它们不允许完全掌握决策和行动对环境的影响。这要求经济和环境目标之间的关系可以用更精确的公式来衡量(Lin等人,2014年;另见Dekker等人,2012年)。因此,为了应对不断增长的需求,引导决策者朝着适应性强、环境友好的方向发展,有必要将环境因素纳入ITT决策支持的优化模型中。
2.2 港口环境可持续性
在过去的二十年中,许多环境问题在港口被讨论。尽管环境可持续性具有根本性的重要性,但学术界的关注有限(见,例如,Acciaroetal.,2014;Asgari等人,2015)。 回顾过去二十年的学术文献,我们发现这一领域的研究主要集中在探索性研究上。在这方面,当前研究的主要焦点,一方面,港口治理和管理评估,日颁布《目标、政策、绩效指标,和指导方针从不同的端口的利益相关者的角度,和,另一方面,研究测量排放在某些领域的宏观的港口。在表1中,我们概述了与港口环境可持续性相关的学术工作。表格显示了考虑的港口区域和确定文献的范围。关于港口地区,我们确定了工作重点港口一般(P),链接到海边操作泊位(B),门口的腹地操作链接(G),和内陆地区(H)。尽管许多作品说诅咒环境(Env)之间的相互作用和经济可持续性(经济学),不被认为是社会的可持续性。为了证明研究的探索性,许多研究基于primary数据来源(Prim.:例如,公司数据),二手数据来源(Sec:如政府政府机构或市场研究机构发布的贸易和运营数据),或通过专家访谈和调查,如应用广泛使用的德尔菲法和层次分析法(AHP)等多标准分析技术。 如表1所述,研究通常通过案例研究来考虑真实港口环境中的具体方面和问题。
关于港口治理和管理,一些工作回顾、定义和框架环境法规、目标和绩效指标,并根据其重要性进行评估(Peris-Mora et al., 2005; Darbra等人,2009; Acciaro et al., 2014; Puig et al., 2014)或港口履行(Lun, 2011; Asgari等人,2015)。 Lun(2011)建议使用数据包络分析(DEA)作为定量工具,从绩效指标的角度评估绿色举措的影响。 一些工作侧重于评估法规、政策和指导方针以及它们在港口的实施(Bateman, 1996; 吉尔曼,2003; 朱利亚诺和奥布莱恩,2007年; Saengsupavanich et al., 2009; Islam et al., 2013)。 关于管理工具的概述见Bailey和Solomon (2004), Bergqvist和Egels-Zandén (2012), Dinwoodie等人。 (2012),林和Notteboom(2014)。
关于港口排放的计算,我们发现一些研究测量和评估了海上和内陆港口运营的影响。 调查发现,海边的排放与船只的到达和离开有关(Ng和Song, 2010; Gibbs et al., 2014; 菲茨杰拉德等人,2011; Berechman and Tseng, 2012)和船舶靠泊(Cooper, 2003; Adamo等人,2014)。 只有少数研究考虑了内陆港口运营对环境的影响。 Giuliano和O 'Brien(2007)以及Islam等人(2013)曾讨论过终端卡车预约系统作为一种减少交通拥堵的手段。 Lättilä等(2013)评估了陆地港口对减少港口之间运输造成的排放的影响。 Palacio等(2016)提出了一种考虑排放影响的港口腹地集装箱堆场选址方法。 Berechman and Tseng(2012)和Villalba and Gemechu(2011)通过计算船舶和卡车的排放来分析与港口相关的排放。 在Berechman和Tseng(2012)中,卡车排放是基于集装箱重量、行驶距离和卡车的一般排放因子计算的。 Villalba and Gemechu(2011)的能耗数据来源于一次客户调查,并利用一定的排放因子转化为排放量。 因此,对港口、车辆和运输业务的个别特点的注意有限。 这些研究没有使用包含地形特征、交通拥堵和空车等细节的详细公式,而是使用相当简单的排放因子模型在宏观水平上粗略估计港口相关排放。 虽然这有助于提高意识并触发战略决策,但不足以支持微观层面的操作决策。
然而,我们发现只有少数学术研究考虑到环境可持续性方面,以支持运营层面的知情决策。 确定的两项工作考虑了泊位分配问题(Duetal.,2011)和车门卡车到达调度问题(Chenetal.,2013)中的排放问题。 Du et al. (2011)提出θ约束求解多目标,Chen et al. (2013)提出采用遗传算法解决多目标规划。在这方面,航运业日益重要的是将环境可持续性作为一个明确的目标 。我们的文献综述进一步表明,对港口环境精神可持续性的研究兴趣日益浓厚。
为了解决已确定的差距,并特别支持跨码头卡车作业的知情决策,我们提出了一种多目标优化方法和可视化操作决策,允许分析经济目标和环境目标之间的权衡。将多目标优化方法嵌入到基于云的决策支持系统中。由于在绿色多目标车辆路径领域也有类似的问题,我们先回顾下一节的工作,然后分别在第3节和第4节给出优化问题和求解方法
2.3 绿色多目标车辆路径选择
在绿色物流和狭义的绿色车辆路径下讨论了车辆路径对环境的影响。 为了提供相关车辆路径问题(VRPs)的概述,重点放在绿色L. Heilig等人/交通研究E 106(2017) 178-202 183多目标VRPs。 对于更全面的概述,我们可以参考Lin et al.(2014)和Eglese and Bektas(2014)中关于绿色车辆路径的调查,以及Dekker et al.(2012)和Sbihi and Eglese(2007)中关于绿色物流的概述。
vrp的排放最小化可能与降低总成本、总旅行距离或旅行时间的商业相关目标相冲突(Eglese和Bektas, 2014)。 为了处理经济和环境目标以及由此产生的权衡,建议使用多目标算法技术(Kim et al., 2009)。 接下来,我们对多目标绿色vrp (GVRP)的相关工作进行了综述。
- Bektas和Laporte(2011)引入了污染路由问题(PRP),这是经典的带时间窗VRP (VRPTW)的扩展。 作者提出了一种混合整数规划模型,其目的是最小化一个目标函数,该目标函数除了考虑司机的总成本外,还考虑了与速度相关的燃料消耗和温室气体排放成本 。Demir等人(2012)提出了一种自适应大邻域搜索(ALNS)启发式算法,首先求解VRPTW,然后在下一步优化车辆速度。 为了解决燃料消耗和旅行时间目标之间的冲突,作者在Demir等人(2014)中将PRP扩展为双目标PRP,并对两个目标函数进行标量化。 为此,提出的ALNS启发式算法采用自适应权方法与约束方法相结合的后验方法来寻找高质量的非支配解。
- Sanchez等人(2016)研究了资源池在企业联盟中减少碳足迹和增加经济效益的作用。作为经典VRPTW模型的推广,该模型的目标是通过进一步考虑最大排放水平作为约束条件,使总成本和排放的加权和最小。 排放计算公式根据行驶距离,采用简单的排放因子,涵盖了车辆的空载重量和燃料类型。提出了一种分散搜索元启发式算法来解决这一问题。利用Shapley值和非合作博弈核心分析了联盟的稳定性和几种联盟组合的利益分配。 这两位作者证明,通过将资源集中到一个联盟中,可以降低成本和碳足迹。此外,它们表明,当所有公司都合作时,实现了最佳的节约,当更多的资源共享时,收益会增加。
- Ubeda等人(2011)提出了一个带回程的VRP (VRPB)模型,该模型使用简单的基于距离的排放因子模型来估计排放量。 该启发式算法首先通过最小化旅行距离来解决路径问题,然后在第二步中,通过考虑路径每一环节产生的二氧化碳(CO2)排放量估计矩阵来重构每条路径。 类似地,Rao等人(2016)提出了一个启发式算法,首先通过最小化总行驶距离来求解一个有能力的VRP (CVRP),在第二阶段,最小化通过道路坡度测量的车辆的能源消耗。
- Jemai等人(2012)提出了一种精英多目标遗传算法NSGA-II算法,通过最小化旅行距离和CO2排放来寻找经典VRP的经济和生态目标之间的最佳折衷。排放总量是用一种简单的基于距离的方法估计的。 虽然作者指出,由于这两个目标的相关性,帕累托前沿的基数很小,但用最小距离获得解决方案并不总是意味着最小的排放。
- Molina等人(2014)进一步考虑了异构车队,其中车辆的容量、成本和排放因素各不相同。 提出了一种多目标混合整数线性规划模型,并利用增广加权切比切夫法求解。 除了成本,目标函数考虑了两种不同类型的排放:CO2和NOx排放。 针对没有时间窗的CVRP,提出了一种基于Clarke和Wright节约算法的启发式算法。
- Norouzi等(2017)引入了一个时变VRP (TDVRP)作为绿色车辆路径领域的子问题。其目标是使总行驶时间、行驶距离和油耗的加权和最小。提出了一种改进的粒子群算法(PSO)来求解该问题。 在他们的问题中,车辆的速度,也就是行驶时间,取决于车辆行驶的时间间隔和轨迹。
- Toro等人(2017)通过提出一个同时考虑总成本和排放的双目标问题,扩展了开放式位置路由问题(OLRP)。 采用约束技术求解该问题。 为了估算成本,作者使用了一个简单的距离依赖的排放因子模型,假设车辆的速度恒定。
- 据我们所知,只有塔吉克等人(2014)提出了考虑燃料消耗和二氧化碳排放成本的不确定性下的时间窗口采集和交付污染路径问题(TWPDPRP)。 他们的问题考虑的是那些需要提货的顾客和那些需要满足的顾客。 因此,对于装载的类型、来源和目的地没有区别(见第3.2节)。 此外,这个问题考虑的是一个独特的车场,而在ITT的情况下,我们可能有几种类型的车辆,意味着不同的起点和配置,可能需要考虑这些车辆,以完全解决本文研究的ITT场景。 关于提货和递送问题(PDP)的总体概述,读者可以参考Parragh et al.(2008)。
3 解决跨码头运输中的排放问题
在最近的一篇文献综述中,ITT优化和解决绿色目标的重要性和实际相关性,特别是关于车辆路径,被指出是一个开放的研究挑战(Heilig和Voß, 2017)。 我们遵循这一研究思路,扩展了最近提出的单目标优化问题,以减少184 L. Heilig等人/交通研究部分E 106(2017) 178 - 202的排放量。在本节中,我们首先回顾和解释如何计算排放量在本工作中考虑,然后介绍多目标间的终端路由问题。 在本节的最后,我们给出一个例子来描述当代港口所面临的底层优化问题。
3.1 碳排放计算Calculation of emissions
3.2 优化问题
终端间卡车路径问题(ITTRP)最初是由Heilig等人(2017a)提出的。 在该工作中,从第三方ITT供应商的角度处理了运输订单要求在港口设施(例如集装箱码头、空集装箱仓库和维修站、增值物流)之间移动集装箱的情况。也就是说,有
 个位置,
个位置,
4 Green-ITTRP多目标问题求解方法
考虑到前面的部分,在Green-ITTRP中,多个目标以多目标的方式同时被考虑。 以上要求研究不同的多目标解决方法,以提供可行和现实的时间表。 其中,我们简要回顾了一些最常用的方法:
- 加权和标量化:将问题视为目标的线性组合。 在这种情况下,需要分配权重来解决问题。
- -constraint方法:优化一个目标,其他标准作为约束条件
- 目标规划:当每个标准都有目标时,就使用这种方法。 在这种情况下,我们的目标是满足所有的目标,即使这个解决方案不属于帕累托阵线。
- 字典排序:这种方法考虑给定的重要性顺序(即,第一个目标是最重要的目标)。 解的质量是根据它们在给定顺序下的目标函数的值来测量的
- 帕累托优化:这种方法,也被称为“后验”,旨在获得不同目标之间的所有折衷解决方案。 得到的解集被称为帕累托前沿。
感兴趣的读者可参考以下著作了解更多细节:Deb et al.(2016)、Marler and Arora(2004)和Ehrgott(2005)。 在这项工作中,我们选择通过生成一个近似的配对帕累托前沿来优化目标函数。 这背后的基本原理是,将更多的偏好放在优化后的决策,而不是之前。 因此,相关的实践者(即调度员)可以选择最适合他们当前场景和目标的计划或解决方案,而不必忍受权衡、排序或其他类型的方法。 因此,这种方法具有较少依赖特定问题知识和用户先验偏好的优点。 相反,例如,加权和-约束方法将多个客观问题转化为单个客观问题,从而限制了对帕累托前沿的充分探索(Mansouri et al., 2015)。 另一方面,帕累托优化可以为当前的目标提供更合适的解决方案,这在相关的车辆路径工作中也有讨论(见2.3节)。 提供Pareto前沿可用于明确地了解问题不同组件之间的权衡。 最后,将环境可持续性作为一个明确的目标被认为是航运业的重要要求(Mansouri et al., 2015)。

4.1. Green-ITTRP的存档多目标模拟退火
为了解决Green-ITTRP,我们提出了一种实现多目标模拟退火(AMOSA,Bandyopadhyay et al., 2008)方法。 该多目标算法是在多目标模拟退火(MOSA)的基础上,同时将模拟退火算法应用于多目标问题的求解。 与前MOSA的主要区别是使用聚类和基于支配的能量函数,遵循一种积极的精英主义策略来维持一个受限的档案。 将AMOSA算法与两种著名的多目标进化算法进行了比较,即针对多个多目标优化问题的NSGA-II (Deb et al., 2002)和PAES (Knowles and Corne, 2000)。 结果表明,在大多数治疗问题中,AMOSA的表现优于MOSA、NSGA-II和PAES。 对于单目标优化,SA有广泛的应用,可以在Aarts等人(2014)中进行检验,包括在港口和海上环境中的成功应用(见,例如Lee等人,2007; Lalla-Ruiz等人,2016; 林婷,2014; Bierwirth和Meisel, 2015),当应用于vrp时(参见,例如Baños等人,2013; Vincent and Lin, 2015; Javad和Karimi, 2017)。 在Heilig et al. (2017a)的工作中,ITTRP的单一目标版本(没有con188 L. Heilig et al. / Transportation Research Part E 106(2017) 178-202考虑排放)已经通过贪婪启发式和SA算法进行了解决。 尽管贪婪启发式算法的性能较好,但混合SA算法的性能优于贪婪启发式算法。 在这方面,Smith(2006)比较了SA与贪婪过程在多目标优化中的性能。 报告的结果和见解表明,在从一个陷入局部前沿的解决方案移动到主导前沿的解决方案是困难的情况下,SA优于贪婪方法。 因此,在我们的工作中使用多目标SA方法的动机是前面的讨论和SA应用领域的相似性。 关于的更多内容,甚至在元启发式领域的最新研究中,也有各种各样的例子显示了使用SA代替或在其他方法之上使用SA的好处; 参见,如:沃ß和Fink(2012)。
如上所述,AMOSA使用dominance-based能量函数,如果真正的帕累托F是可用的,前面一个特解的能量x的总数计算解决方案,主导x。尽管如此,因为它可以发生在现实世界的大问题,完整的帕累托面前可能不可用。 那么就需要使用一个近似的Pareto front F0,它是由搜索过程中到目前为止找到的相互非支配解组成的。 因此,当前解决方案的能量x是近似的解决方案总数前控制x。如果kF0 x0k新解决方案的能量x0, kF0 xk是当前解决方案的能量x,然后电流之间的能量差德和新解决方案是计算为:
4.2
5 数值实验
在本节中,我们给出了计算实验的结果,以评估提出的多目标优化方法。 在给出计算结果之前,我们简要地解释了数据集和问题实例以及参数设置的结果。 使用一种新颖的可视化技术,我们例证地检查了帕累托前沿的解决方案,并给出了权衡分析的结果
5.1 数据和问题实例
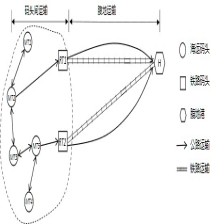
为了评估提出的算法,我们使用位于德国汉堡港的30个实际设施生成了一组问题实例,包括集装箱码头(CT)、空集装箱堆场(D)和维修站(D+R),以及港口相关增值物流设施(VAL)。 由于缺乏可用数据,对运输订单的生成进行了综合处理。 即,使用均匀分布随机选择一个地点,并与另一个随机选择的地点结合,分别形成一个取货地点和发货地点的运输顺序。 由于我们的方法主要用于短期规划,所以根据对从业者的采访,一天中各种连接发生的可能性几乎是相同的,所以统一分布是合适的。 这进一步适用于港口地区卡车的位置和可用性,这也是随机选择的。 如图2所示,一些卡车位于专用卡车停放区域,而其他卡车则位于港口内的任意区域。 在本研究中,我们假设铝卡车是柴油驱动的。 表4提供了关于设施、卡车和运输订单的数据生成的详细信息。
一个问题实例由固定数量的运输订单(即两个地点之间的运输)和卡车组成。 根据这些数据,我们通过增加运输订单和卡车的数量来生成25个不同的问题实例,以保证可行性。 订单和卡车的最大数量(200个订单,60辆卡车)已根据咨询从业人员的经验确定。
5.2 实验环境
接下来,我们简要概述了嵌入所提出的多目标优化方法的决策支持系统的实现。 Mansouri et al.(2015)假设,支持航运业的知情决策和权衡分析,需要开发具有多目标优化能力的决策支持系统。 海事决策支持系统高度依赖各种数据来源,目前的方法通常是手工获取数据,缺乏及时的决策。 在这方面,我们将我们的方法嵌入到一个创新的、最先进的基于云的决策支持系统中,并使用该环境进行所有的计算实验。
移动云平台,被称为port-IO,支持调度员和卡车司机之间的实时交互,基于一个web应用,实现软件即服务(SaaS)和一个移动应用,如图3所示。 因此,它不仅是可能的同步新规划结果与相应的驱动程序执行命令,同时能够考虑每个司机的上下文数据,比如他们的实际位置使用手机应用程序以及使用谷歌地图API当前交通信息,调度需要考虑。 在这项工作中,我们扩展了Heilig等人(2017a)提出的第一个port-IO版本,该版本是ITT环境下用于单目标优化的基于云的决策支持系统。 如上所述,移动云平台构建在谷歌App Engine (GAE)之上,我们使用自动缩放选项(参见谷歌,2017)来为执行环境提供计算资源。
5.3 参数设置
为了确定合适的AMOSA参数,使用参数值的不同组合对各种配置进行了测试。 需要注意的是,我们将初始存档的大小 固定为40个解决方案,并将启动温度tempmax定义为存档中的随机解决方案的标准化目标函数值的百分比b。 表5概述了导致180个测试组合的参数值。 每个测试使用从整个问题实例集中随机选择的5个代表性问题实例执行了10次。 这导致在port-IO并行执行9000个死刑。
固定为40个解决方案,并将启动温度tempmax定义为存档中的随机解决方案的标准化目标函数值的百分比b。 表5概述了导致180个测试组合的参数值。 每个测试使用从整个问题实例集中随机选择的5个代表性问题实例执行了10次。 这导致在port-IO并行执行9000个死刑。
在测量多目标算法的质量时,常用的方法是测量最佳Pareto前沿与算法所提供的Pareto前沿之间的距离。 在这方面,Zitzler和Thiele(1999)提出的措施之一是hypervolume indicator, Iv。



5.4 实验结果
我们进行了计算实验来评估所提出的多目标优化方法的性能。 为此目的,我们对每个问题实例执行10次执行,并计算平均值,在AMOSA的情况下,为表示每个问题实例的解决方案质量,计算所有相关 Archive解决方案的平均值。
首先,我们比较了AMOSA的平均溶液质量与初始溶液施工技术的结果。 正如前面提到的(见4.1节),我们将Heilig等人(2017a)提出的GLTH扩展到多目标问题。 表6给出了两种解决方案的性能评估结果,分为“贪婪启发式”和“AMOSA”两列。 列“实例”包含25个问题实例,每个实例表示发送订单数量和可用卡车数量的组合(订单数量,可用卡车数量),如5.1节所述。 结果以实际的二手车数量(“Veh”)、空车数量(“Emp”)、为所有订单提供服务所需的总服务时间(“时间(h)”)和以可变成本为单位的目标函数值(“Var。 )、固定成本(“固定成本”)和温室气体排放(“排放(公斤)”)。 Impr列”。 (%) "表示针对各自目标溶液质量的平均改进百分比。

从求解质量上看,所提出的求解方法能够提高所有目标函数的值。 而变动成本的改善率尤其高,平均30.73%,固定成本减少20.20%,排放量减少13.41%。 当考虑整个实例的不同改进值时,不会检测到与实例大小和解决方案质量相关的趋势。 然而,当实例的规模增加时,在固定成本和排放方面改善解决方案似乎变得更加困难。 此外,我们看到,优化导致更好地利用可用卡车和协调订单行程。 首先,我们的解决方法平均比贪婪启发式少使用4辆卡车。 其次,通过加强将订单分配给卡车,可以节省大约20小时的工作时间。 虽然在某些情况下,空车数量低于或几乎等于初始解决方案存档(例如,5,80、100、140个订单),但有趣的是,由于使用更少的卡车,空车数量平均稍微增加了2.71%。 应该注意的是,从卡车的起始位置到第一个位置的第一次行程不计入空行程,从最后一个位置返回的行程也不计入空行程
5.5. Pareto front-end visualization and analysis
为了更好地分析我们的解决方案方法的贡献和有效性,我们在图4中绘制了三个代表性场景的随机选择的执行的Archive解决方案。 首先,我们讨论在三维代表代表中绘制的解决方案(图4,左图)。 此外,我们提出了一种方法来可视化和分析解决方案使用三元图(图4,右边的图),其中的解决方案是标准化的。 在图4中(左)的黑色节点代表解决方案使用贪婪启发式生成初始存档,蓝色节点(在黑色和白色的浅灰色,BW)代表溶解条款实现使用集群机制,和红色节点(深灰色BW)时获得集群机制是不习惯。
- 首先,我们可以看到,所有属于初始归档的解决方案都处于主导地位,因此得到了改进,如表6所示。 特别是在35和50阶的情况下,我们观察到节点往往分布在靠近长方体左下角的位置。 这意味着我们的方法更适合在优化期间考虑所有三个目标。
- 通过比较蓝节点和红节点,我们可以评估集成的聚类机制的性能。 虽然情节表明红色的解决方案,归档没有集群,主导蓝色的解决方案在大多数的情况下在这三个场景中,这些解决方案的亲密显然表明,集群机制成功地代表憎恨那些良好的解决方案,可用于减少计算工作 。
解决方案的三维表示使得我们很难,甚至不可能,理解不同目标的解决方案之间的差异。 由于从业人员需要选择一种解决方案将其应用于跨码头卡车作业,因此需要一个适当的、可理解的可视化方案。 为此目的,我们提供了一种可视化方法,将三维表示转换为三维二维表示,如图4(右)所示。 这种表示允许决策者根据所有三个目标来比较解决方案。 虽然解决方案已经代表了适当的妥协,但决策者能够选择最适合组织利益的解决方案。 例如,如果解决方案对环境的影响应该非常低,决策者可能更喜欢三角形左边区域的解决方案。
生成这样的可视化F帕累托面前,我们首先规范化的客观价值点和我们确定解决方案年代”∈F和最高的归一化值,k后,我们规模标准化值根据k .注意,在本例中,结果的点值的总和s0是1。 此外,为了提供三元的两个维度,并因此确保这种类型的图所需的剩余点等于1,每个解都添加了一个附加值,即2f。 的值计算如式(11)所示。

where jMj indicates the dimensions according to the objectives considered and xs i is the corresponding coordinate of solution s 2 F for the dimension i 2 M. If > 0, the contribution to each dimension s i is equal to jMj and added as indicated in Eq. (12).

从三元图中,我们可以检查Archive中与AMOSA相对应的所有解都是非支配解。 此外,还可以观察到以下模式。
- 解决方案位于一个走廊,其中可变成本的标准化值在9到63之间,固定成本在25到62之间,排放在1到58之间。 这些界限表明可变成本主要受到与其他两个目标的冲突的影响。 而在排放方面,我们发现与其他两个目标的冲突并不是很强烈,所以在优化时往往会得到更多的具有较好的排放值的解。 这方面将在绩效评估的最后部分进行更详细的讨论。


 Fig. 4. Three-dimensional visualization of different approximated Pareto fronts (left) and two-dimensional visualization of archived solutions composing an approximated Pareto front (right) for scenarios with 35, 50, and 75 orders (from top to bottom)
Fig. 4. Three-dimensional visualization of different approximated Pareto fronts (left) and two-dimensional visualization of archived solutions composing an approximated Pareto front (right) for scenarios with 35, 50, and 75 orders (from top to bottom)
图4 不同近似帕累托前沿的三维可视化(左)和归档解决方案的二维可视化(右),这些解决方案构成了35、50和75个顺序的场景(从上到下)的近似帕累托前沿
- 特别是在第二种情况下,50个订单,我们可以确定两个集群在一个走廊关于固定成本。 左边的集群包含低排放但高可变成本的解决方案,而右边的集群在可变成本方面提供了更好的解决方案,但对排放有负面影响。 同样的情况也适用于第一个有35个订单的场景,尽管与第二个场景相比集群密度不是那么高。
- 在第三个例子中,有75个顺序,近似的帕累托前沿被定位为排放友好的解决方案,这也导致了关于三个例子的最高可变成本。 虽然这些解决方案在可变成本方面是均匀分布的,但它们位于图4中线附近或以下。 不同近似帕累托前沿的三维可视化(左)和归档解决方案的二维可视化(右)组成了35、50和75个顺序的场景(从上到下)的近似帕累托前沿。 196 L. Heilig等人/交通运输研究E部分106(2017)178-202走廊的固定成本。 主要原因是,正如后面讨论的更多细节,由于关于卡车类型的选择的冲突:一些更环保,但意味着较高的固定成本,而另一些不太环保,友好,但意味着较高的可变成本
5.6. Trade-off analysis综合分析,权衡分析
旨在衡量改善一个目标对其他两个目标的影响
接下来,我们将解决方案方法的平均结果与每个目标的最佳解决方案进行比较。 也就是说,对于每个问题实例,我们选择只考虑一个目标的最知名的解决方案,并计算与平均解值的差值(见表6)。因此,我们旨在衡量改善一个目标对其他两个目标的影响。 在这方面,Impr一栏。 (%)“表示对报告的最佳解决方案目标的改进,Gap(%)”表示其他目标的恶化。 表7包含了这一比较的结果。 从结果可以推断出以下几个一般方面。
- 在选择可变成本最低或固定成本最低的解决方案时,只专注于一个目标,实现最高的改进; 平均改善21.45%和20.68%。 这种高强度的改进主要是由于旧卡车数量和空车数量之间的冲突。 也就是说,减少卡车数量会导致空车出行的增加,反之亦然。
- 特别是对于较小的实例(例如,5个、10个、20个订单),我们可以观察到,在考虑可变成本方面最知名的解决方案时,目标之间的冲突会导致更高的差距。 然而,我们可以发现30个订单中的一个案例,其中最著名的可变成本的解决方案也是固定成本的最佳解决方案。 在这种情况下,在使用相同数量卡车的情况下,通过允许额外的空行程(与最知名的固定成本解决方案相比),可以减少工作时间。 这也是排放量差距较小(3.98%)的原因。
- 可以进一步观察到,只注重关于排放目标的最佳解决办法对总成本有相当大的影响。 反之,与其他两个目标差距相比,关于排放目标的差距较小。 这种差距不能完全用空车的数量来解释。 原因是,如前所述,环保卡车通常意味着较高的固定成本。 然而,总体差距较小表明,旨在更好地规划和协调活动以降低总体成本的经济解决方案通常也会带来生态效益。 然而,研究结果强烈表明,只关注排放在同样程度上并不有利可图。
6. 管理启示(Managerial insights)
在本节中,我们从管理的角度总结和讨论主要的发现和影响,以证明我们的综合方法在实践中的重要性和使用可能性。
- 资源利用:与贪婪的启发式方法相比,使用建议的解决方案方法可以极大地改善运营指标,对总体成本和排放有很大的影响。 后者可以看作是实践中常见的一种基于规则的方法。 这建议使用复杂的多目标优化技术,在运输作业的跨终端卡车路线。
- 空移:我们的港口相关研究表明,在优化成本和排放时,减少空移只起次要作用。 由于道路网络的个体结构和港口环境的交通状况,避免空行并不总是可行的。 以汉堡港为例,当地港口之间的距离相对较短,因此空行对成本和排放的影响不像其他港口那么高。 这就产生了一个需要在实践中加以考虑的重要问题,因为一方明显的节省可能会以意想不到的方式损害其他目标。 也就是说,接受空的移动可以产生积极的影响,特别是如果它允许在某些情况下减少二手卡车的数量。
- 权衡:从这项研究中提取出的一个含义是,如果配备了最新减排技术的卡车在运营过程中更加昂贵,那么具有最佳排放值的解决方案对总体成本有相当大的影响。 然而,结果表明,当选择最有利可图的解决方案时,使用我们的方法也可以导致显著的减排。 与整体非主导解决方案相比,选择一个服务时间最短或成本最低的解决方案,可降低约21%的成本。 在这种情况下,建议选择最小化服务时间,例如,每天完成更多的订单,或者降低固定成本,例如,在巨大的成本压力下。 因此,我们的方法可以在实践中分析和评估不同的权衡。
- 可持续的港口物流:通过考虑卡车的特定特征来估算排放,以及其他重要因素,我们的方法旨在利用那些在绿色目标方面更可取的卡车类型。 鉴于许多港口的新规定和“清洁卡车”计划(Norsworthy和Craft, 2013; NABU, 2014),例如,惩罚和限制不符合特定的空气排放标准的卡车的进入,提出的方法有助于优先考虑可用的运输资源。 此外,排放与燃料消耗密切相关(如3.1节所述),而燃料消耗可能与较低的经济表现有关。

- 实用性:所解决的优化问题考虑了与港口相关的ITT操作的相关方面和限制。 在许多港口,卡车运输公司与小型分包商的合作是一种常见的商业模式。 通过提出的可视化方法,调度员可以很容易地掌握和比较各种可能的解决方案,并根据自己的偏好和现状匹配需求和容量。 在这方面,该组织可以制定选择解决办法的规则,例如,优先选择意味着对成本或排放影响最低的解决办法,但仍然主要是,其中包含各项目标之间的良好权衡。 这简化了决策者的解决方案生成,旨在在不同目标之间找到一个好的折衷方案。 此外,提出的算法已经嵌入到一个“就绪使用”的云决策支持系统中
7. 结论和研究展望
麦肯锡(McKinsey)的一项全球调查(Bonini and Görner, 2011)显示,企业早就意识到,可持续发展活动的价值主要不在于支持企业声誉,而在于以运营和增长为导向的改善。 特别是在运输部门,在处理管理和自然资源限制的同时,不仅要考虑经济效率,而且还要考虑环境和社会问题,这变得越来越重要。 作为全球供应链的重要组成部分,海港在确保货物和信息的高效流动方面发挥着重要作用。 许多国际海港在努力实现可持续发展的同时,面临着严峻的挑战。 关注经济和环境精神的可持续性,理解权衡和提供创新的工具和方法来支持复杂的多目标决策过程是很重要的。 基于对ITT和港口环境可持续性的全面概述,我们发现,考虑到支持港口日常拖运作业的环境方面的学术研究缺乏,特别是在优化和决策方面。
按照这一思路,这项工作提供了一种新颖的商业分析方法,以支持与港口相关的国际电话电报公司的多目标决策,同时考虑到经济和环境目标以及国际电话电报公司的具体要求。 该方法使ITT能够有效地进行规划,以改进卡车的选择以及相关行动者之间的协作和信息交流。 为此,我们引入Green - ITTRP,并将其与相关的绿色VRP进行比较,强调其具体特点。 为了在微观尺度上对排放进行详细估算,我们扩展了一种先进的计算标准,根据单个卡车、载重和地理特征,以及考虑距离、空车和拥堵情况,来衡量卡车的能源消耗和排放。 为了解决当前的多目标优化问题,我们提出了一种AMOSA算法,并基于一组问题实例进行了计算实验来评估其性能。 总的来说,结果强烈表明,使用我们的方法,与贪婪启发式相比,在成本、卡车使用和排放方面取得了相当大的改善。 因此,我们看到,高效的多目标规划算法可以帮助决策者在揭示和解释目标之间的协同和冲突的同时,找到一个好的折衷方案。 应用的聚类机制进一步减少了决策者必须从中选择一个解决方案的集合,使该方法具有合理的可行性。
在这方面,我们分析了近似帕累托前沿的结构,以及不同成本和生态相关目标之间的相互作用和权衡。 一个主要的发现是,从非主导的解决方案池中选择最经济的解决方案,而不是最环保的解决方案,将导致对其他目标的破坏程度更低。 关注与成本相关的目标,结果表明卡车数量和空行之间的冲突:减少卡车数量导致空行增加,反之亦然。 结果表明,由于港口路网结构和交通状况的特殊性,避免空行并不总是可行的。 关于帕累托前线的结构,我们举例说明了三种具有代表性的方案中的大多数解决方案在固定成本方面都位于走廊中心线的上方或下方。 这强调了当决定成本和排放不同的卡车车队时,决策的重要性。 此外,我们的方法也可以帮助决策者在有关使用环保卡车的投资决策。 为了减少复杂性和提高决策的实用性,我们进一步开发了可视化技术,将三维表示转换为三元图,允许更好地分析和比较非支配解。
借鉴之前的工作,我们将提出的算法集成到一个可访问、可扩展和多租户的移动云平台中。 正如引言中所讨论的,信息系统在塑造海港的组织实践和过程中发挥着关键作用。 利用移动云平台,我们可以考虑卡车的实时情境信息和港口的真实环境,如实际位置和交通状况。 此外,它与外部系统集成,为高级决策分析提供了基础,例如,将优化与机器学习和聚类机制相结合。 从这个意义上说,我们提供了一个实时的决策支持系统,将商业分析的不同方面进行了透视,以作为未来智能和可持续港口的解决方案。
对于未来的研究,我们的目标是通过扩展所提出的决策支持系统来进一步比较我们的解决方法和其他先进的方法和技术。 这包括开发和集成机器学习方法,以更好地预测不同港口位置的等待和周转时间,并检测运营期间的问题、低效和中断,以促进港口内敏捷和高响应性的运输操作。 最后,概念性和实证研究应涵盖数字转型方面的当前挑战,L. Heilig等人/交通研究E部分106(2017)178-202 199,包括社会和文化方面,这在设计和发展未来可持续港口时不应被忽视。 虽然我们的方法主要是为港口条件设计的,但我们的目标是将想法和概念传达到其他应用领域。















 2989
2989

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









