







AGV调试安全防护
一、超叉保护
1.1背景
增量式电机,断电后位置不保存,所以此处增加SICK拉线编码器作为实时高度获取,为防止线断或被拉扯,在用电机获取的位置值作为校验。
1.2构想思路
1)上电时记录拉线编码器数值H_Last;电机高度(转换过)h_Last;
2)举升到最高处时,得出此时H_Difference=H_Current-H_Last;
h_Difference=h_Current-h_Last;
3)比较拉线差值与电机高度差值,fabs(H_Difference-h_Difference)>10mm;就报超叉报警,否则正常
1.3具体代码实现
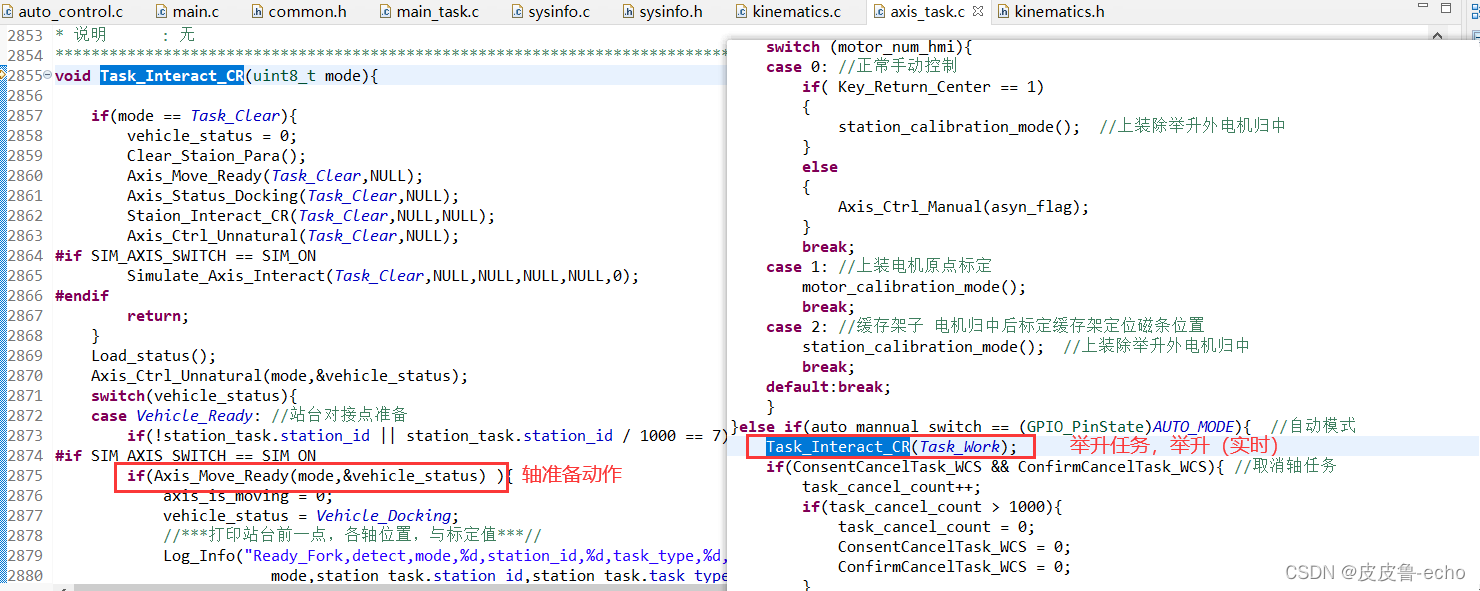
1.4加入该判断的位置
举升任务->自动->轴准备动作(上线后均在)->step=4站台前一点取放货物(放货举升最高处时进行判断)
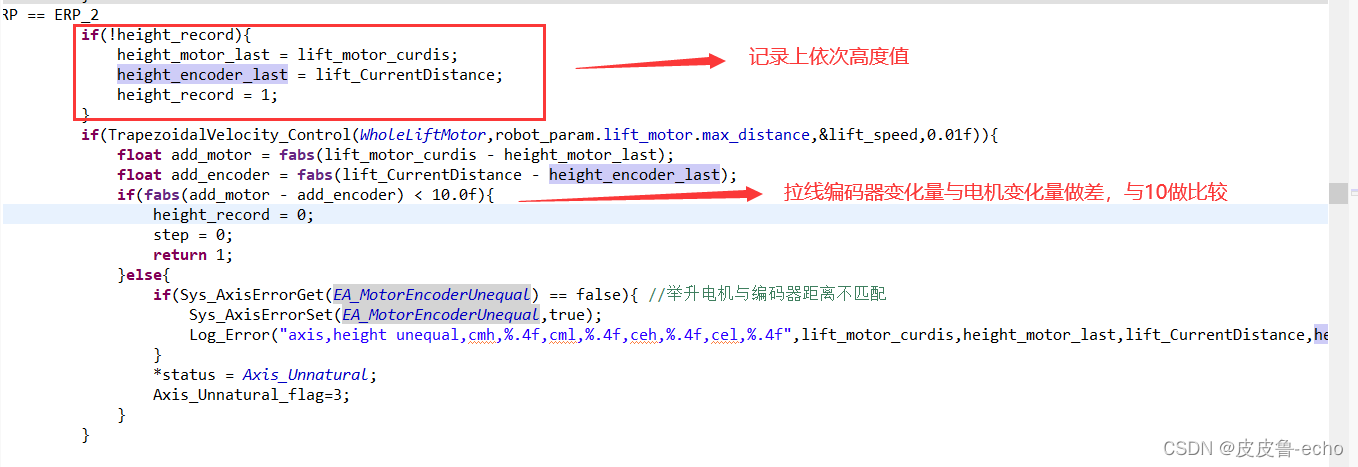
1.5具体代码实现
if(!height_record)
{
height_motor_last = lift_motor_curdis;
height_encoder_last = lift_CurrentDistance;
height_record = 1;
}
if(TrapezoidalVelocity_Control(WholeLiftMotor,robot_param.lift_motor.max_distance,&lift_speed,0.01f)){
float add_motor = fabs(lift_motor_curdis - height_motor_last);
float add_encoder = fabs(lift_CurrentDistance - height_encoder_last);
if(fabs(add_motor - add_encoder) < 10.0f){
height_record = 0;
step = 0;
return 1;
}else{
if(Sys_AxisErrorGet(EA_MotorEncoderUnequal) == false){ //举升电机与编码器距离不匹配
Sys_AxisErrorSet(EA_MotorEncoderUnequal,true);
Log_Error("axis,height unequal,cmh,%.4f,cml,%.4f,ceh,%.4f,cel,%.4f",lift_motor_curdis,height_motor_last,lift_CurrentDistance,height_encoder_last);
}
*status = Axis_Unnatural;
Axis_Unnatural_flag=3;
}
}














 897
897











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









