







本文转载自Wupke原创文章,仅用于个人笔记,如侵联删;
原文链接:https://blog.csdn.net/Kefenggewu_/article/details/121504425
目录
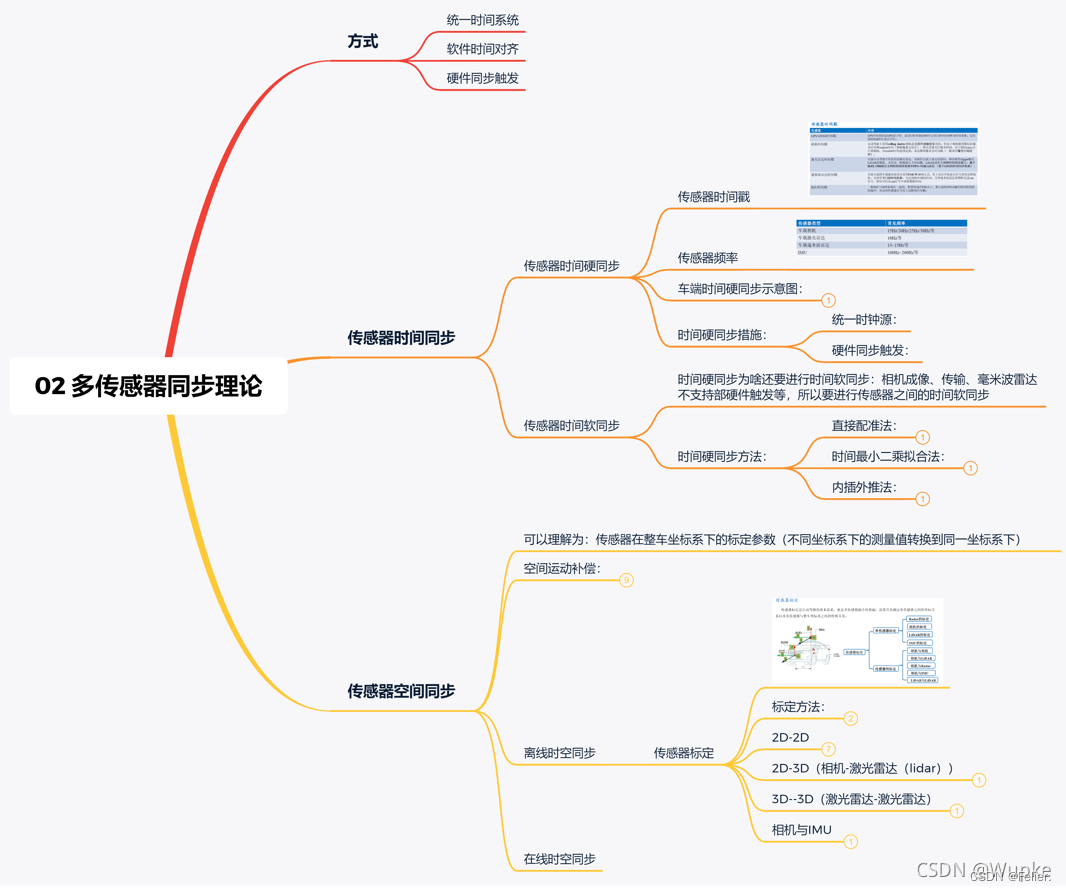
1、传感器时空同步概念
传感器间空间同步,就是不同传感器坐标系下的测量值转换到同一坐标系下(也可以理解为传感器在整车坐标系下的标定参数)。传感器标定是自动驾驶的基本需求,也是多传感器融合的基础,需要首先确定各传感器之间的坐标关系以及各传感器与整车坐标系之间的转换关系。同样,理解空间同步的本质,可以拓展到车体坐标系如何转换到世界坐标系下的过程。
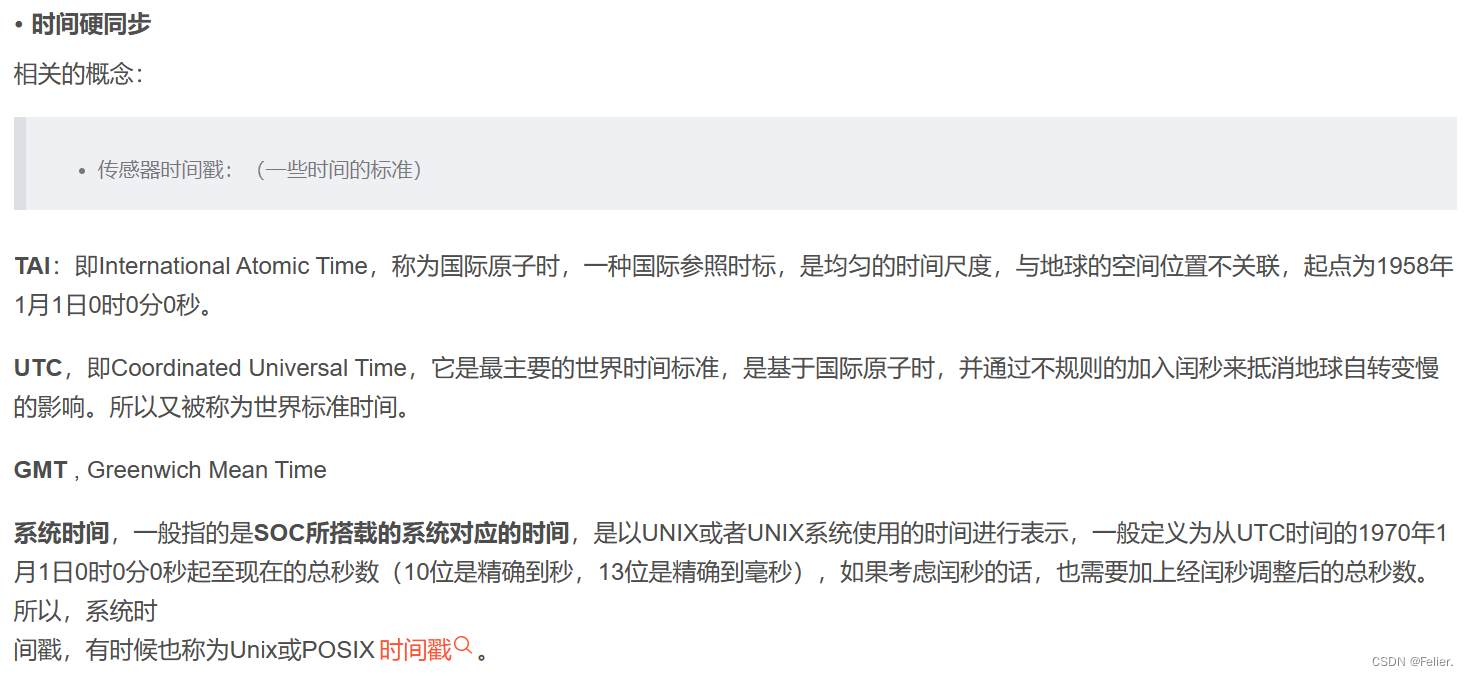
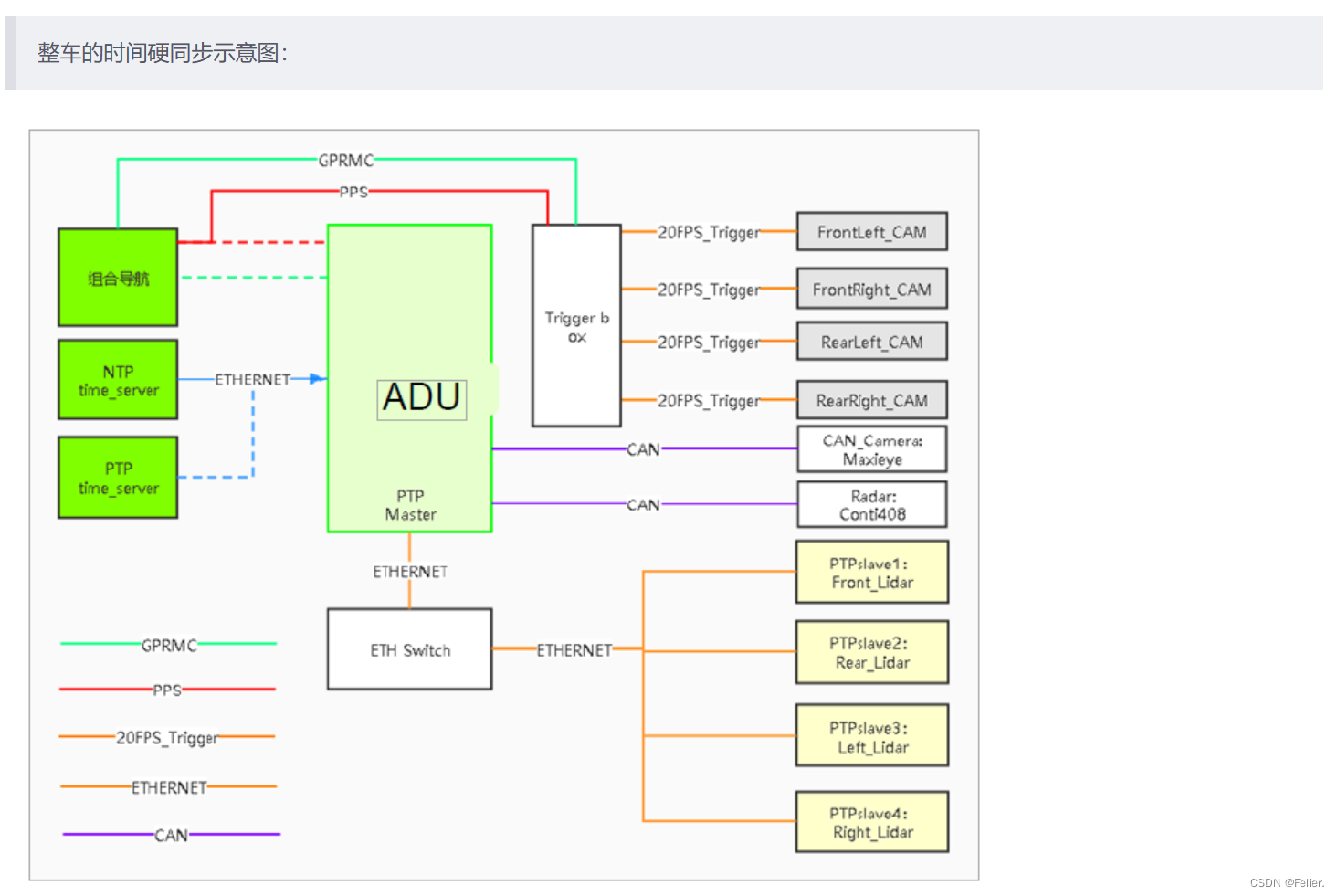
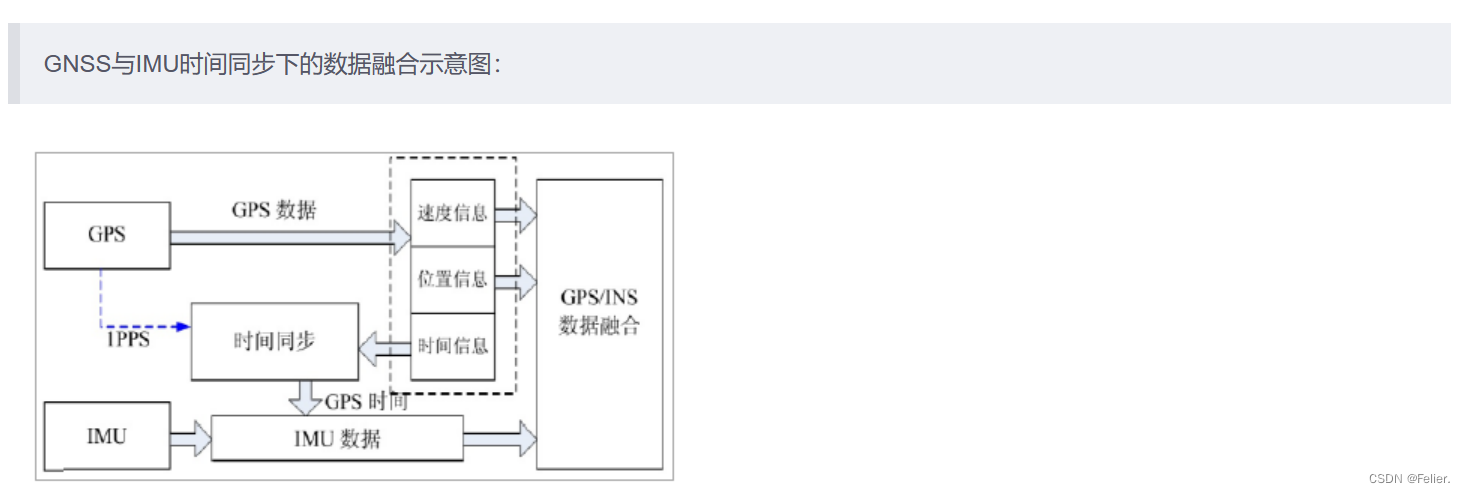
2、传感器时间同步
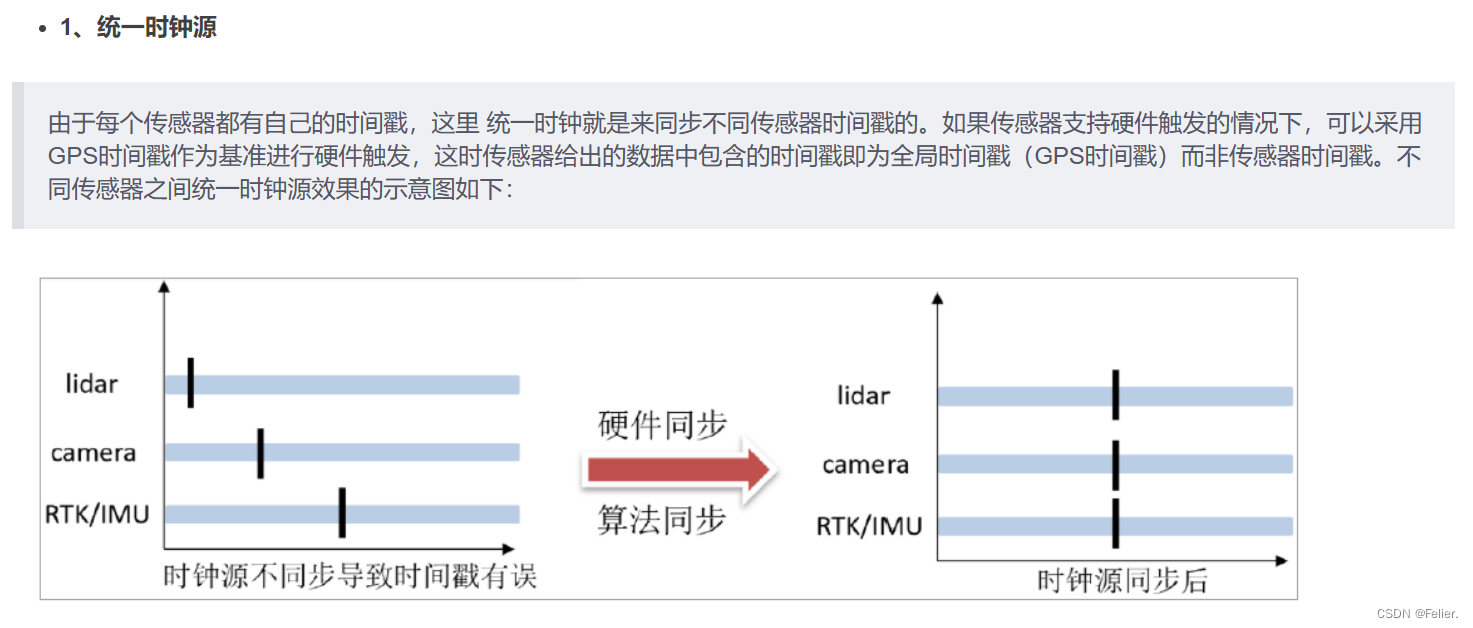
自动驾驶除了空间坐标系需要进行精确同步外,各个设备(或者传感器)之间的时间坐标系也需要进行同步。只要提到传感器融合,时间同步就是不可避免的操作步骤。
时间同步就是通过统一的主机给各个传感器提供基准时间,各传感器根据已经校准后的各自时间为各自独立采集的数据加上时间戳信息,以做到所有传感器时间戳同步。



3、传感器时空同步
运动补偿:即是对传感器测量过程,物体的运动或者传感器的运动,造成实际的运动数据偏差,进行量化弥补。
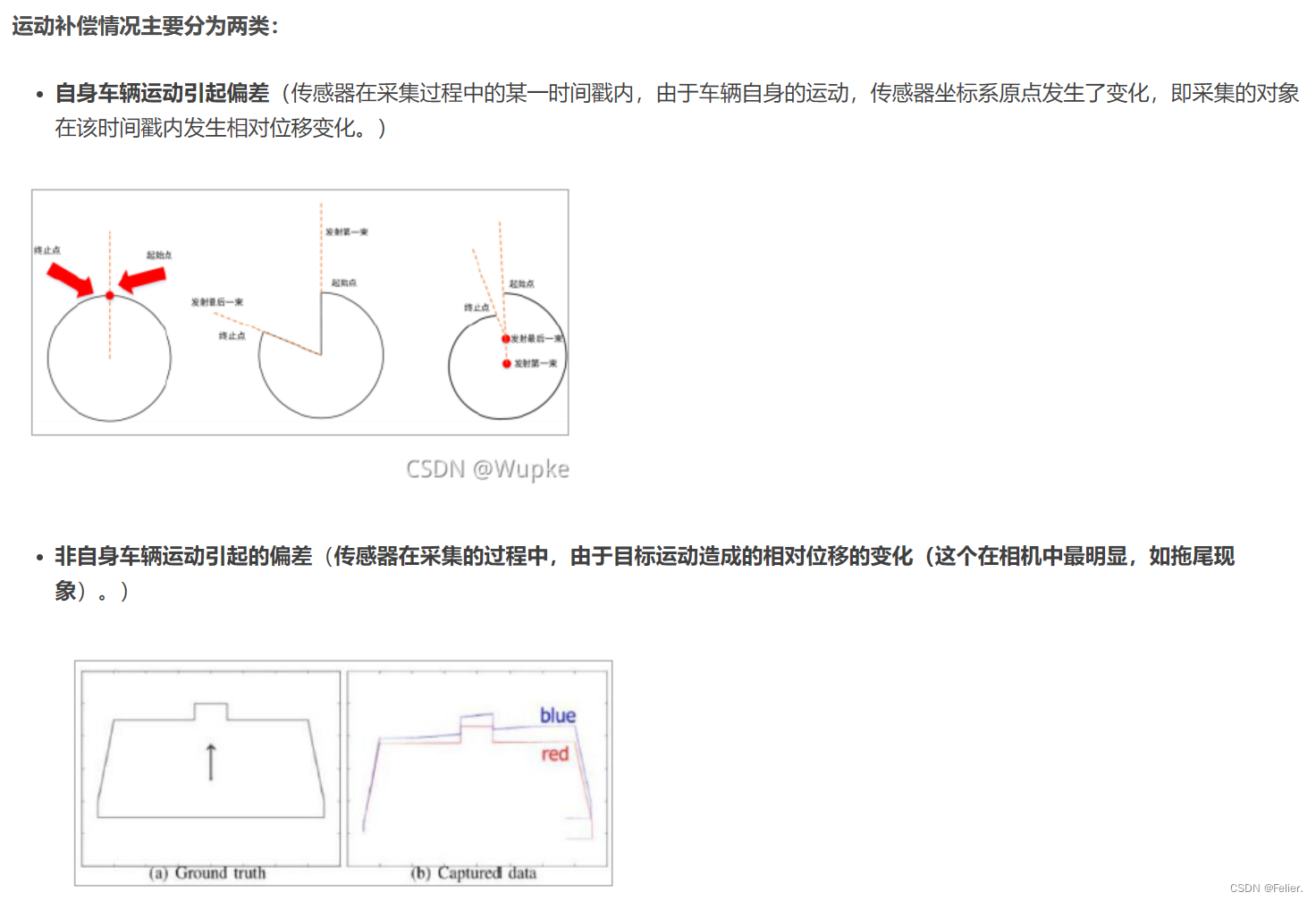
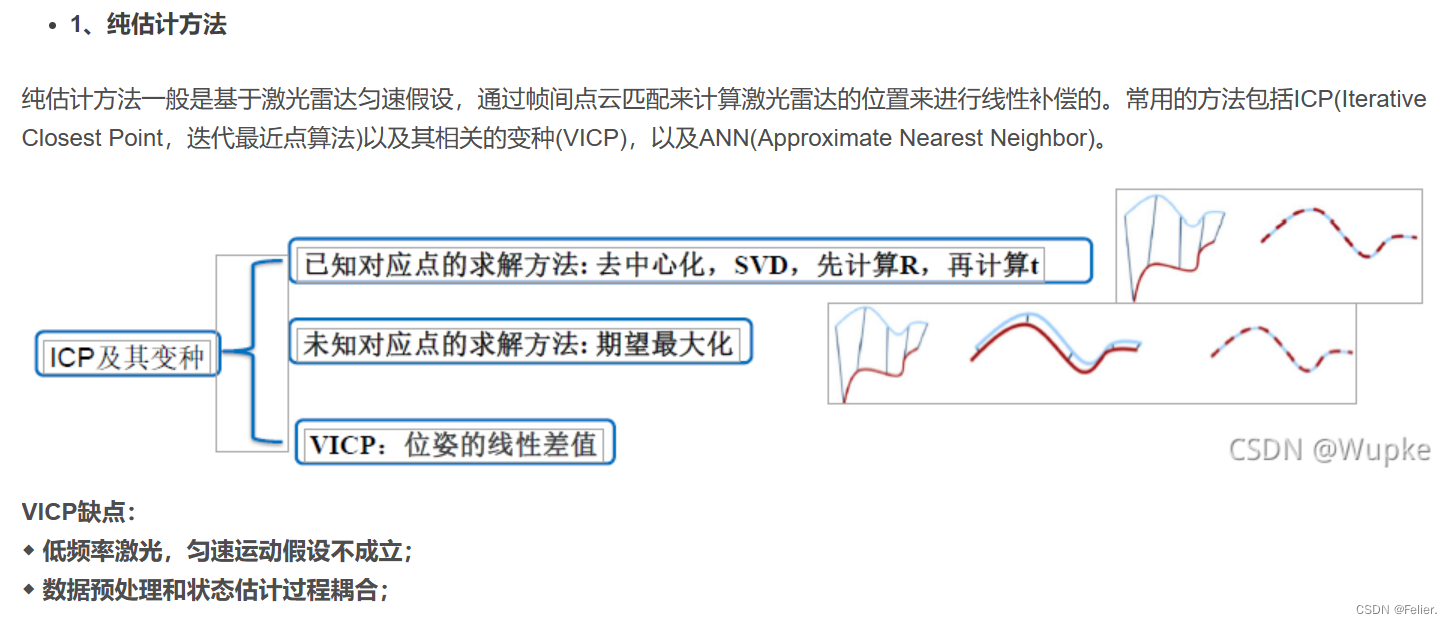
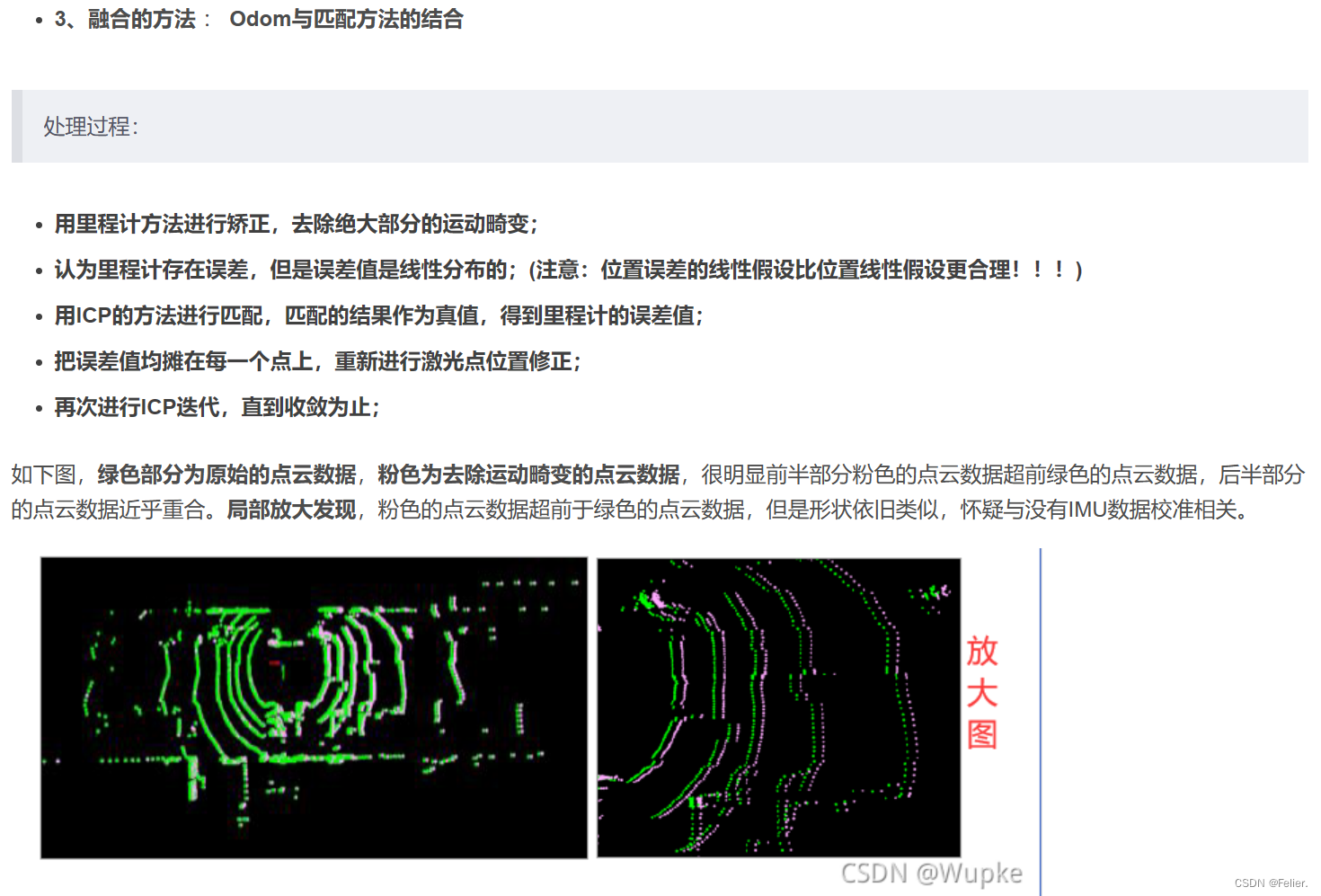
运动补偿的方法

















 58
58

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









