






Central Idea:
针对地面车辆实时6-自由度姿态估计问题,本文提出了一种轻量级、地面优化的激光雷达测程测绘方法LeGO-LOAM。LeGO-LOAM是轻量级的,因为它可以在低功耗的嵌入式系统上实现实时的位姿估计。LeGO-LOAM是地面优化的,因为它在分段和优化步骤中利用了地面的存在。首先应用点云分割滤除噪声,然后进行特征提取以获得明显的平面和边缘特征。然后,两步Levenberg-MarQuardt优化方法使用平面和边缘特征在连续扫描中求解6-自由度变换的不同分量。经过实验与原本的LOAM方法进行比较,LeGO-LOAM在减少计算量的情况下达到了类似或更好的精度。作者还将LeGO-LOAM集成到SLAM框架中,以消除漂移造成的位姿估计误差,并使用Kitti数据集进行了测试。
研究背景(针对什么问题而进行此研究)
在机器人的功能中,地图构建和状态估计十分重要。
1.基于视觉的SLAM系统依赖视觉传感器对于光照和视点的变化十分敏感,有时会导致不可靠。
2.高分辨率的3D激光雷达可以在远距离、宽孔径的范围内捕捉环境细节,甚至可以在夜间工作。
3.典型的激光SLAM在两次扫描间寻找匹配的方法是迭代最近点(ICP),计算成本较高。而其他的研究多是基于如何削减这种计算成本进行的,没有根本上解决这个问题。
4.基于特征的激光匹配方法已经被证实可以节省计算资源,但是仍然存在一些问题。
5.作者在LOAM的基础上进行了改进
相关工作
1.使用Kanade-Tomasi角点检测器从点云中提取通用特征的方法
2.从密集的点云中提取线和面特征的框架
3.局部簇中执行点曲率计算的关键点选择算法
4.专门为Velodyne激光雷达设计的领线段(CLS)方法
5.SegMatch提出了一种基于分割的配准算法
本文的工作与作者的系统描述
典型的LOAM系统:
一种低漂移的实时激光雷达里程仪测绘方法。执行点特征到边/面扫描匹配以查找扫描之间的对应关系。通过计算点在其局部区域内的粗糙度来提取特征。选择粗糙度值高的点作为边缘特征。同样,具有低粗糙度值的点被指定为平面特征。通过新颖地将估计问题划分为两个单独的算法来实现实时性能。一种算法运行在高频下,以低精度估计传感器速度。另一种算法运行频率较低,但返回的频率较高。
小型UGV在多变地形上行驶时,经常会遇到运动不平顺的情况,因此采集到的数据往往会失真。由于具有有限重叠的大运动,在两次连续扫描之间也很难找到可靠的特征对应。此外,从3D激光雷达接收到的大量点对使用有限的车载计算资源的实时处理提出了挑战。
同时由于小型UGV上激光雷达的安装位置通常靠近地面,因此来自地面的传感器噪声可能会持续存在。例如,从草地返回的范围可能会导致较高的粗糙度值。因此,可能会从这些点提取不可靠的边缘特征。类似地,也可以从从树叶返回的点提取边缘或平面特征。这种特征对于扫描匹配通常是不可靠的,因为在两次连续扫描中可能看不到相同的草叶片或叶子。使用这些特征可能会导致配准不准确和较大的漂移。
所以,在此基础上对LOAM进行了一定的改进做成了LeGO-LOAM系统:
1.具有地面优化功能,可以对来自于地面的点进行甄别,不参与匹配,节省计算资源
2.低功耗可作为嵌入式
3.点云分割再在提取特征点进行匹配,这里可以大量地降低计算时间,节省计算资源
4.优化了Levenberg-MarQuardt位姿估计方法
A硬件系统
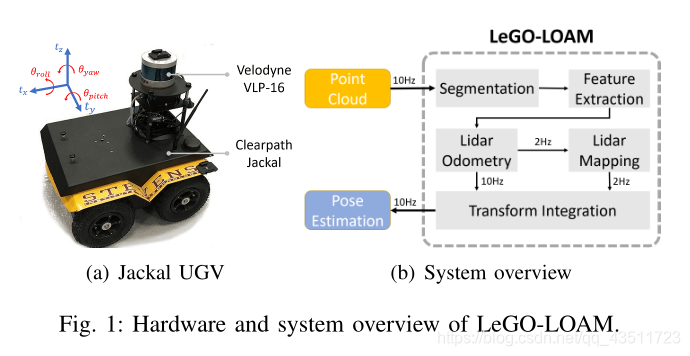
B系统概述
分为5个模块:
1.分割,获取单次扫描的点云,并将其投影到距离图像上进行分割。
2.将分割后的点云发送到特征提取模块。
3.激光雷达里程计使用从前一个模块中提取的特征来找到与连续扫描相关的变换。
4.这些要素将在激光雷达映射中进一步处理,并将其注册到全局点云地图。
5.最后,变换积分模块将激光雷达测距和测绘的位姿估计结果进行融合,输出最终的位姿估计。
分割过程
1.提取地面点,并在此后对地面点不予分割
2.将基于图像的分割方法应用于距离图像以将点分组为多个簇。同一簇中的点被指定一个唯一标签。地面点是一种特殊类型的群集。对点云进行分割可以提高处理效率和特征提取精度。
3.仅保留可表示大对象(例如,树干)的点和地面点以供进一步处理。
特征提取
与典型地LOAM系统不同的是,本文不是从原始点云中提取特征,而是从地面点和分割点中提取特征
S是距离图像同一行的点的连续点的集合。S中一半的点在圆周率的两边。本文设为 10.
1.将深度图像划分为多个子图像,并且设置阈值Cth来区分Edge Features和 Planar Features
2.将点分类后归入不同的集合,方便后面做匹配用。
激光雷达里程计
激光雷达里程计模块估计两次连续扫描之间的传感器运动。通过执行点到边和点到面扫描匹配,找到两个扫描之间的转换,就是把两次扫描的点进行匹配
所做改进:
1.标签匹配法
2.两步L-M优化
雷达激光建图
实验对比
小规模UGV实验
 b、c为典型LOAM系统的
b、c为典型LOAM系统的
d、e为LeGO-LOAM系统的
可以看到经过点云分割的LeGO-LOAM 的特征点数量大为减小,节省了大量的无用匹配计算时间
注:典型的LOAM系统中的很多噪点来自与树叶。
大规模UGV实验
实验一:
在运动平稳的城市环境中,典型的LOAM和LeGO-LOAM都能实现低漂移姿态估计。我们避免具有侵略性的偏航动作,我们避免驾驶机器人通过仅能获得几个稳定特征的稀疏区域。
实验二:
实验二的轨迹通过了具有杂乱物体的人行道,会导致得到很多不可靠的特征点. 实验发现LOAM会出现位姿估计的偏差,LeGOLOAM不存在这样的问题:1)从被草覆盖的地面上没有提取边缘特征;2)分割后滤除树叶中的噪声传感器读数。两种方法的准确度比较如表V所示。在本实验中,乐高壤土的准确度比壤土高一个数量级。
实验发现LOAM会出现位姿估计的偏差,LeGOLOAM不存在这样的问题:1)从被草覆盖的地面上没有提取边缘特征;2)分割后滤除树叶中的噪声传感器读数。两种方法的准确度比较如表V所示。在本实验中,乐高壤土的准确度比壤土高一个数量级。
 实验三:
实验三:
数据集记录在一条森林覆盖的徒步旅行小道上,环境复杂

 从图中可以明显看出经过几次的循环后 ,典型的LOAM系统所绘制路径出现了严重分散,而LeGO-LOAM系统的绘制路径非常一致。
从图中可以明显看出经过几次的循环后 ,典型的LOAM系统所绘制路径出现了严重分散,而LeGO-LOAM系统的绘制路径非常一致。
结论
文章提出了(LeGO-LOAM),这是一种轻量级的地面优化激光雷达里程计和测绘方法,用于在复杂环境下对UGV进行实时位姿估计。LeGO-LOAM是轻量级的,它可以在嵌入式系统上使用,并实现实时性能。LeGO-LOAM也是地面优化的,利用地面分离、点云分割和改进的L-M优化。在这个过程中,可能代表不可靠特征的无价值的点被过滤掉。两步L-M优化分别计算姿势变换的不同组件。该方法在室外环境中采集的一系列UGV数据集上进行了评估。实验结果表明,与目前最先进的算法LOAM相比,LeGO-LOAM算法的准确率与其相持平或者更高。同时LeGO-LOAM的计算时间也大大减少。















 565
565











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









