






概率机器人的核心是由传感器数据来估计状态。
贝叶斯滤波是状态估计的递归算法,也是每一项状态估计算法的基础。
一. 贝叶斯算法的两个步骤
(1)prediction (计算先验置信度)
(2)测量更新(结合观测量和先验量,计算出后验置信度)
再将(2)中的后验置信度结合状态转移模型计算下一状态的先验置信度(1),依次递推。
二. 贝叶斯算法的启动条件(输入):
初始状态的置信度
三. 贝叶斯滤波的数学推导
基于隐马尔可夫模型(HMM)
(1)计算先验置信度
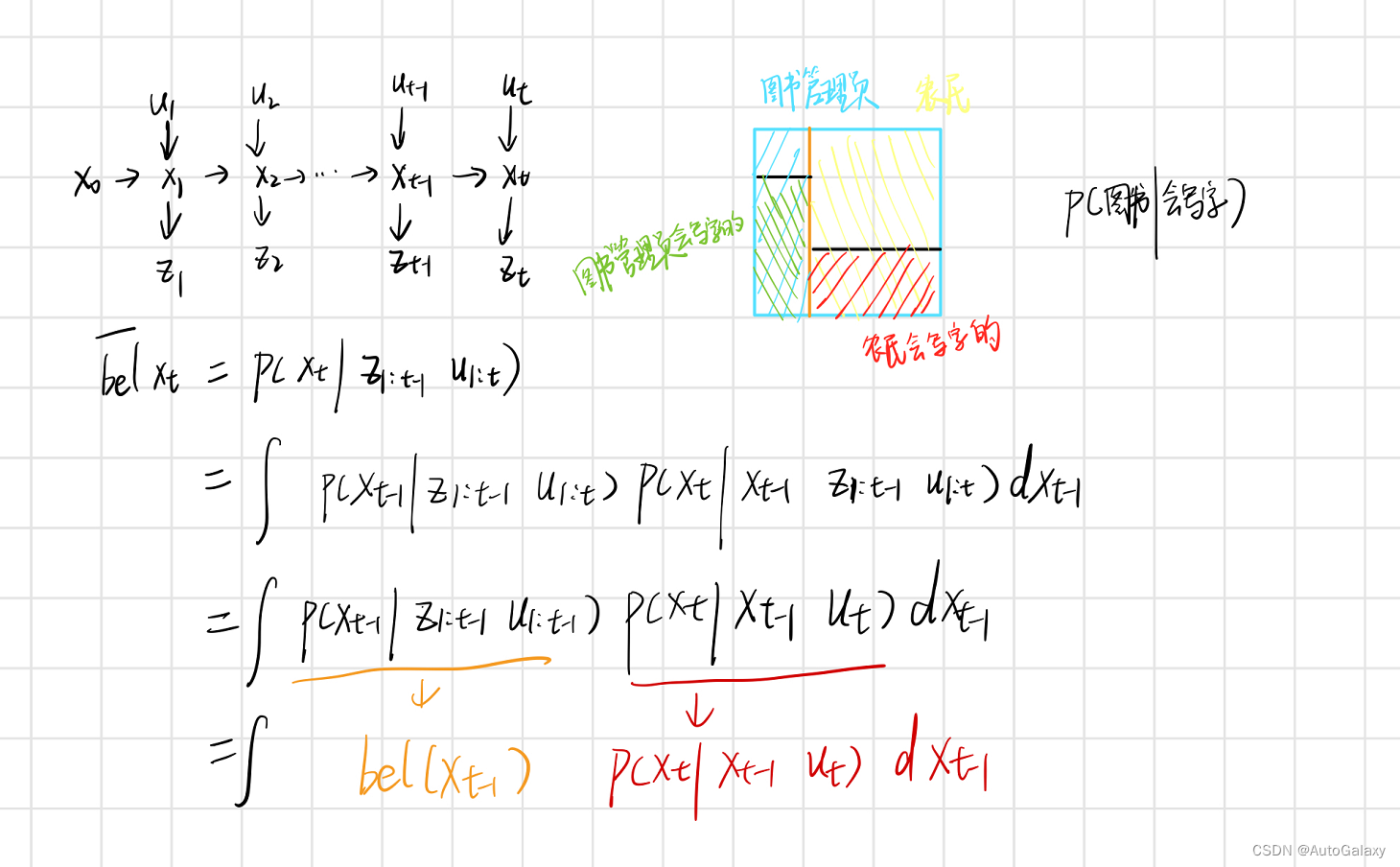
(2)计算后验置信度


概率机器人的核心是由传感器数据来估计状态。
贝叶斯滤波是状态估计的递归算法,也是每一项状态估计算法的基础。
(1)prediction (计算先验置信度)
(2)测量更新(结合观测量和先验量,计算出后验置信度)
再将(2)中的后验置信度结合状态转移模型计算下一状态的先验置信度(1),依次递推。
初始状态的置信度
基于隐马尔可夫模型(HMM)
 300
1243
300
1243











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























