






首先,PID控制(Proportional-Integral-Derivative Control)是一种广泛应用于工业控制系统中的反馈控制算法。其核心思想是通过对控制误差的比例、积分和微分进行计算和组合,以实现对系统的精确控制。
我们分开来看PID控制的P控制,I控制和D控制。
首先需要知道几个变量的物理意义:
SV:Set Value 设定的目标值;
CV:Current Value 系统当前值;
E(t) = SV — CV;当前误差值;
U(t):待增加的值(连续);
U(x):待增加的值(离散)。
这里先给出连续状态和离散状态下的公式,在连续状态下:

在离散状态下:

上面两个式子中,三个部分分别表示P-I-D控制,Kp,Ki,Kd分别表示调试的系数,接下来看看三个控制方法,以将转速为0的电机调整到100转为例子(设定Kp,Ki,Kd都为0.5)。
(1)P控制(比例控制):![]() ,此处
,此处![]() 为100。,Kp为0.5。则有输出Y = 0 + 50等于50,将50当做CV的值,下一次引入过后,输出Y则为75,以此类推,很容易就将达到100。当然,这是理想的情况,实际上因为电路的阻抗的消耗和电机老化,不可能达到100,大概只有90,这就和我们想的不一样,会一直存在E(t) = 10。电机实际转速始终只有90,这叫稳态误差;如何来消除稳态误差呢?我们使用积分来估算误差。
为100。,Kp为0.5。则有输出Y = 0 + 50等于50,将50当做CV的值,下一次引入过后,输出Y则为75,以此类推,很容易就将达到100。当然,这是理想的情况,实际上因为电路的阻抗的消耗和电机老化,不可能达到100,大概只有90,这就和我们想的不一样,会一直存在E(t) = 10。电机实际转速始终只有90,这叫稳态误差;如何来消除稳态误差呢?我们使用积分来估算误差。
(2)I控制(积分控制):当存在稳态误差的情况下,通过比例控制已经无法消除CV和SV之间的稳态误差了,此时每一个循环都会存在相同的误差E(t),但我们的目标应当是E(t)逐渐减小的,因为稳态误差的存在,会一直有一个E(t),这里引入积分控制就可以消除该稳态误差,为什么呢?之前学过的高等数学知识有讲到,积分的物理意义是一段时间内,物理量的总和。如果对之间的所有误差值E(t)进行积分,就可以表示前面所有的E(t)的和,当进入稳态误差的状态后,虽然E(t)保持不变,但此时,![]() 是不断累积的,因此,U(t)的值就会增大,从而导致输出增大,以使CV = U(t)+CV不断逼近SV的值。那么问题来了,引入积分控制之后,在进入稳态误差状态之前又会有什么样的现象呢?在前两次循环的时候,因为
是不断累积的,因此,U(t)的值就会增大,从而导致输出增大,以使CV = U(t)+CV不断逼近SV的值。那么问题来了,引入积分控制之后,在进入稳态误差状态之前又会有什么样的现象呢?在前两次循环的时候,因为![]() 的累计,会导致U(t)的值很大,使得CV = U(t)+CV超过SV的值,此时的E(t) = SV – CV,E(t) < 0,又会使得
的累计,会导致U(t)的值很大,使得CV = U(t)+CV超过SV的值,此时的E(t) = SV – CV,E(t) < 0,又会使得![]() 的值降低,从而使CV朝着SV逼近,如下图所示:
的值降低,从而使CV朝着SV逼近,如下图所示:

观察上图,在进入一个较稳定的状态之前,会有一段震荡,高于目标值SV的震荡是我们不愿意看到的,因为我们的系统的最大值如果是100,目标值设置为100,上面的部分就是超出系统的性能范畴,可能引起设备故障,我们把该现象叫做超调。
(3)D控制,即微分控制,在公式上是 ,当误差E(t)快速变化时,
,当误差E(t)快速变化时, 也会变大,从而使U(t)的值快速调整,以抵消误差的变化,在无人机姿态控制中,姿态误差的快速变化会导致微分项
也会变大,从而使U(t)的值快速调整,以抵消误差的变化,在无人机姿态控制中,姿态误差的快速变化会导致微分项 增加,控制器快速调整电机转速,抵消姿态的急剧变化,保持机身稳定。
增加,控制器快速调整电机转速,抵消姿态的急剧变化,保持机身稳定。
综上所述,理想状态下(无摩擦,无设备损坏,无电路阻抗等)比例控制可以很好的进行设备控制,但理想情况下是不存在的,积分控制可以很好的抵消各种因素导致的误差,这就是PID控制算法的厉害之处了,而积分的引入会导致,系统震荡和超调,使用微分控制可以稳定系统震荡。
在介绍完上述控制算法的基础知识过后,我们来想想如何利用FPGA实现该算法呢?根据上述公式和理解不难发现,该系统存在反馈,反馈的值需要不断的进入系统后进行循环运算。因此,使用状态机可以很好的实现该公式,装填图设计如下: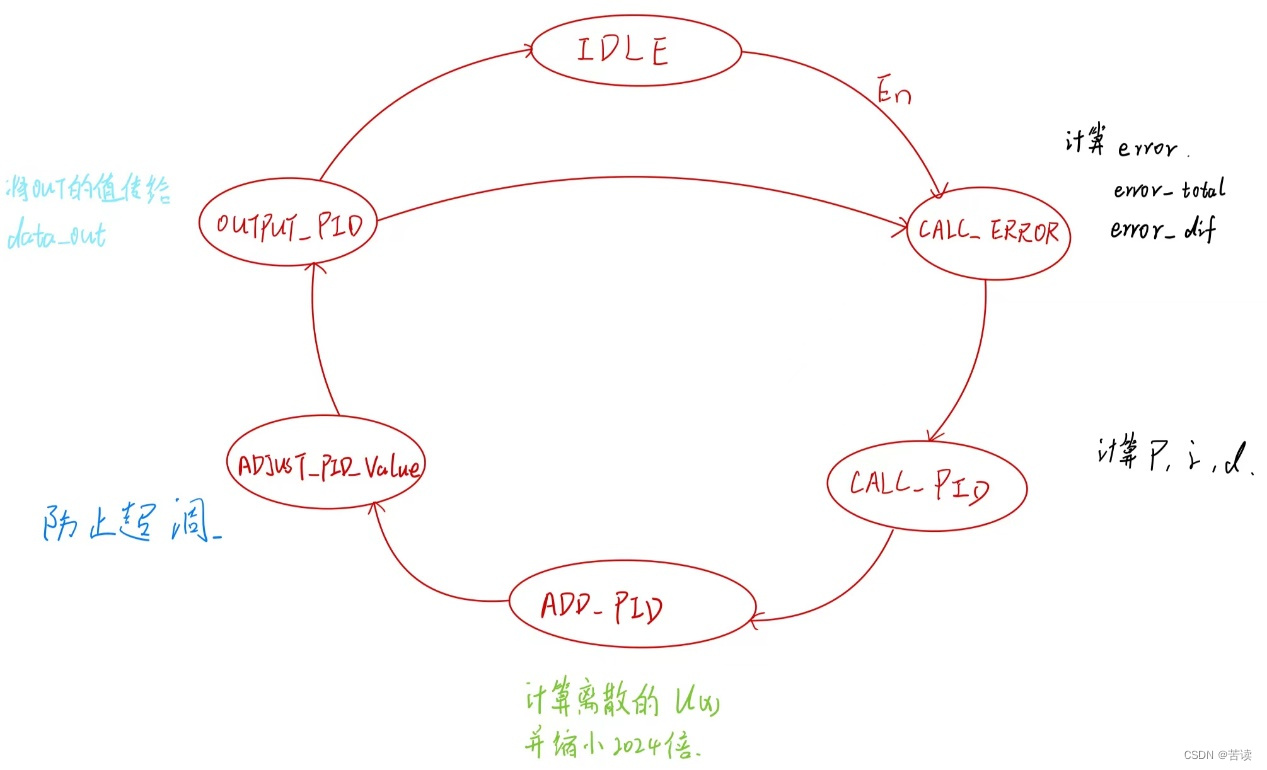 根据状态图写出的状态转移代码如下图所示:
根据状态图写出的状态转移代码如下图所示:
case (state)
IDLE: next_state = pid_start ? CALC_ERROR : IDLE;
CALC_ERROR: next_state = CALC_PID;
CALC_PID: next_state = ADD_PID;
ADD_PID: next_state = ADJUST_PID_VALUE;
ADJUST_PID_VALUE: next_state = OUTPUT_PID;
OUTPUT_PID: next_state = FEED_BACK;
FEED_BACK: next_state = (!pid_start) ? IDLE : CALC_ERROR;
endcase仿真结果如下图所示:
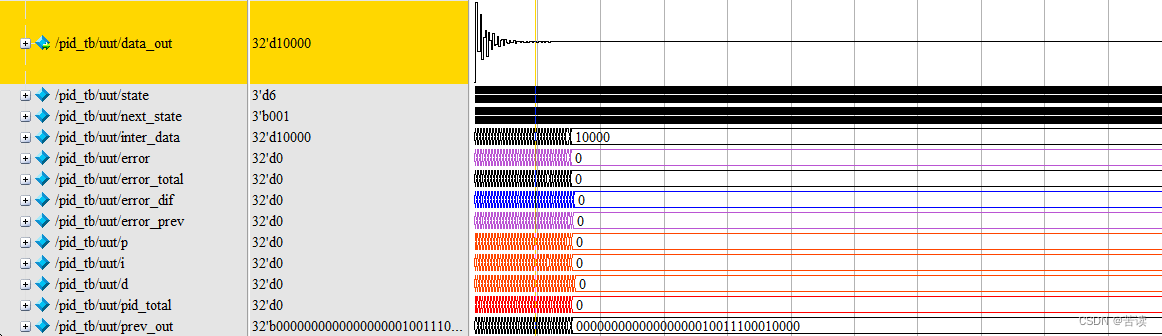
从上图中可以看出,在系统稳定后,E(t),![]() ,
,![]() ,的值都为0,系统收敛到目标值的速度较快,在10us左右,是单片机的几十倍。
,的值都为0,系统收敛到目标值的速度较快,在10us左右,是单片机的几十倍。
疑问和技术交流欢迎联系邮件:619743936@qq.com
















 1715
1715

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









