







文章目录
前言(注:由于每个人的环境不同,所述方法不一定适用所有人,此笔记仅当作者自己的问题记录)
parrot ardrone2.0 + ros_indigo 问题记录
1.gazebo中插入自己的模型
gazebo版本:gazebo7.12.0
1.1 利用gazebo自带的编辑器制作模型
步骤:1.运行gazebo
2.点击左上角edit/building editor或model editor
3.绘图
4.保存(保存时,新建文件夹 如my_war)
保存之后 会在my_war中形成两个文件:model.config和model.sdf,将my_war文件夹整体放在./gazebo/models下。(在主文件夹下按Ctrl H 会显示./gazebo文件夹)
此时,可以打开gazebo 点击insert找见自己的模型。
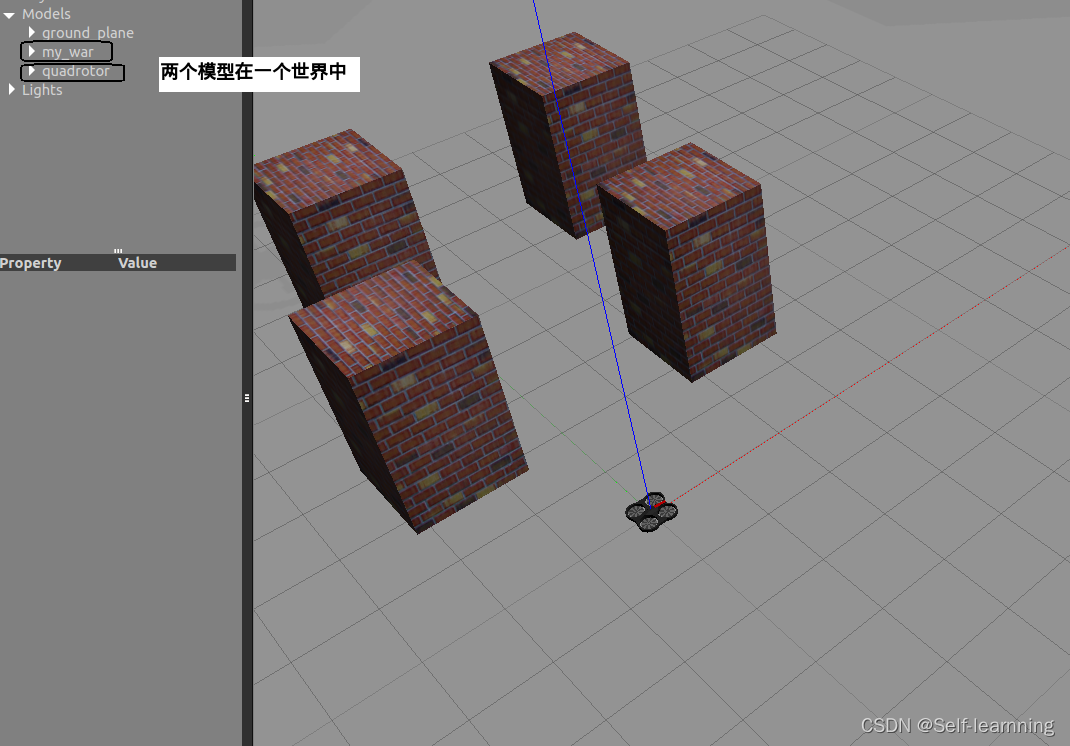
1.2 调用新建的模型和其他模型在一个world中(利用launch)
1.在自己的功能包下新建world文件夹,在该文件夹下新建.world文件。

2.在该文件内填入以下代码
<sdf version='1.6'>
<world name='default'>
<light name='sun' type='directional'>
<cast_shadows>1</cast_shadows>
<pose frame=''>0 0 10 0 -0 0</pose>
<diffuse>0.8 0.8 0.8 1</diffuse>
<specular>0.1 0.1 0.1 1</specular>
<attenuation>
<range>1000</range>
<constant>0.9</constant>
<linear>0.01</linear>
<quadratic>0.001</quadratic>
</attenuation>
<direction>-0.5 0.5 -1</direction>
</light>
<model name='ground_plane'>
<static>1</static>
<link name='link'>
<collision name='collision'>
<geometry>
<plane>
<normal>0 0 1</normal>
<size>100 100</size>
</plane>
</geometry>
<surface>
<friction>
<ode>
<mu>100</mu>
<mu2>50</mu2>
</ode>
<torsional>
<ode/>
</torsional>
</friction>
<contact>
<ode/>
</contact>
<bounce/>
</surface>
<max_contacts>10</max_contacts>
</collision>
<visual name='visual'>
<cast_shadows>0</cast_shadows>
<geometry>
<plane>
<normal>0 0 1</normal>
<size>100 100</size>
</plane>
</geometry>
<material>
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/Grey</name>
</script>
</material>
</visual>
<self_collide>0</self_collide>
<kinematic>0</kinematic>
<gravity>1</gravity>
</link>
</model>
<!-- 此处加自己的模型 以下 -->
<model name='my_war'>
<include>
<uri>model://my_war</uri>
</include>
</model>
<!-- 此处加自己的模型 以上 -->
<gravity>0 0 -9.8</gravity>
<magnetic_field>6e-06 2.3e-05 -4.2e-05</magnetic_field>
<atmosphere type='adiabatic'/>
<physics name='default_physics' default='0' type='ode'>
<max_step_size>0.001</max_step_size>
<real_time_factor>1</real_time_factor>
<real_time_update_rate>1000</real_time_update_rate>
</physics>
<scene>
<ambient>0.4 0.4 0.4 1</ambient>
<background>0.7 0.7 0.7 1</background>
<shadows>1</shadows>
</scene>
<spherical_coordinates>
<surface_model>EARTH_WGS84</surface_model>
<latitude_deg>0</latitude_deg>
<longitude_deg>0</longitude_deg>
<elevation>0</elevation>
<heading_deg>0</heading_deg>
</spherical_coordinates>
<state world_name='default'>
<sim_time>581 925000000</sim_time>
<real_time>38 808833466</real_time>
<wall_time>1618890393 270034891</wall_time>
<iterations>36891</iterations>
<model name='ground_plane'>
<pose frame=''>0 0 0 0 -0 0</pose>
<scale>1 1 1</scale>
<link name='link'>
<pose frame=''>0 0 0 0 -0 0</pose>
<velocity>0 0 0 0 -0 0</velocity>
<acceleration>0 0 0 0 -0 0</acceleration>
<wrench>0 0 0 0 -0 0</wrench>
</link>
</model>
<light name='sun'>
<pose frame=''>0 0 10 0 -0 0</pose>
</light>
</state>
<gui fullscreen='0'>
<camera name='user_camera'>
<pose frame=''>-5.57259 -2.71913 2.87031 0 0.265358 0.347715</pose>
<view_controller>orbit</view_controller>
<projection_type>perspective</projection_type>
</camera>
</gui>
</world>
</sdf>

3.新建.launch文件
在launch文件中填入以下代码:
<?xml version="1.0"?>
<launch>
<!-- We resume the logic in empty_world.launch, changing only the name of the world to be launched -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find cvg_sim_gazebo)/worlds/war.world"/>
</include>
<!-- Spawn simulated quadrotor uav -->
<include file="$(find cvg_sim_gazebo)/launch/spawn_quadrotor.launch" >
<arg name="model" value="$(find cvg_sim_gazebo)/urdf/quadrotor_sensors.urdf.xacro"/>
</include>
<arg name="pid_namespace" default="pandora_ardrone2_pid" />
<node
name="pandora_ardrone2_pid_node"
type="pandora_ardrone2_pid_node"
pkg="pandora_ardrone2_pid"
respawn="False"
output="screen"
ns="$(arg pid_namespace)" >
</node>
</launch>

4.运行 roslaunch roslaunch cvg_sim_gazebo ar_tag_test_new.launch
1.3修改parrot模型在gazebo中的初始位置
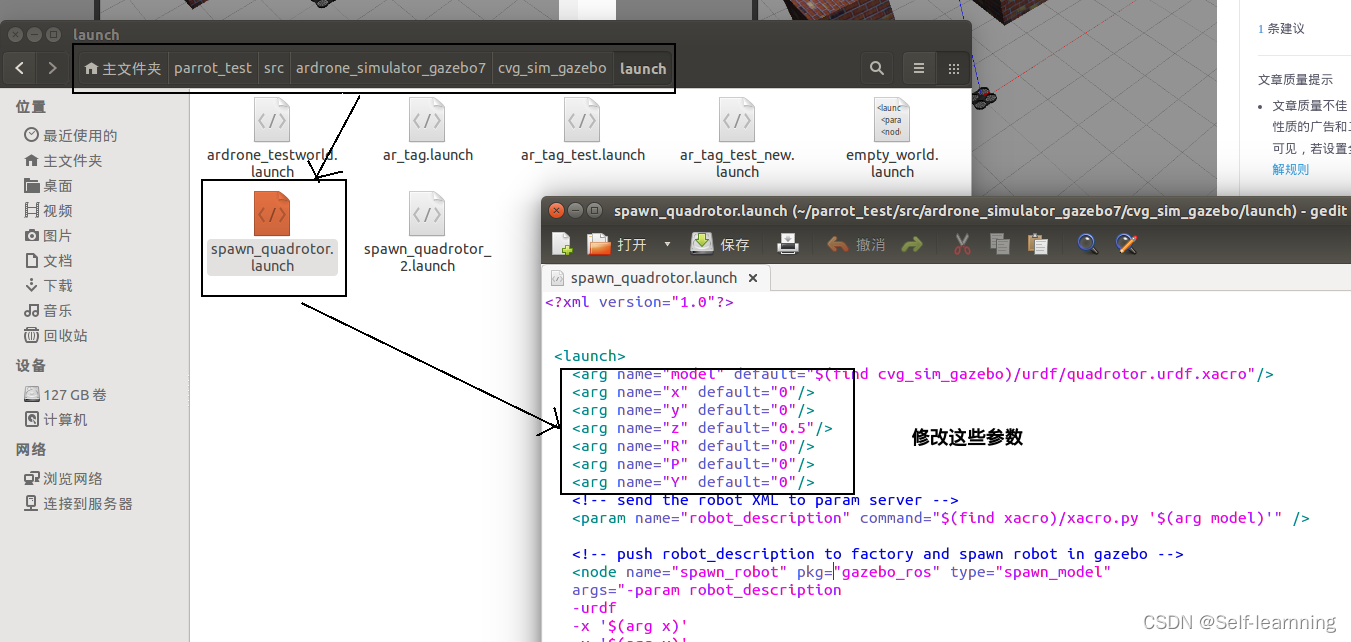
各个标签的含义:http://sdformat.org/spec?ver=1.9&elem=model#include_pose
1.4 仿真复位:rosservice call /gazebo/reset_simulation "{}"
2 rospkg.common.ResourceNotFound: rosgraph
2.1 问题描述
在pycharm中运行ros程序是,提示rospkg.common.ResourceNotFound: rosgraph,但是在终端运行无问题。并且运行rospack find rosgraph”也能找到rosgraph。
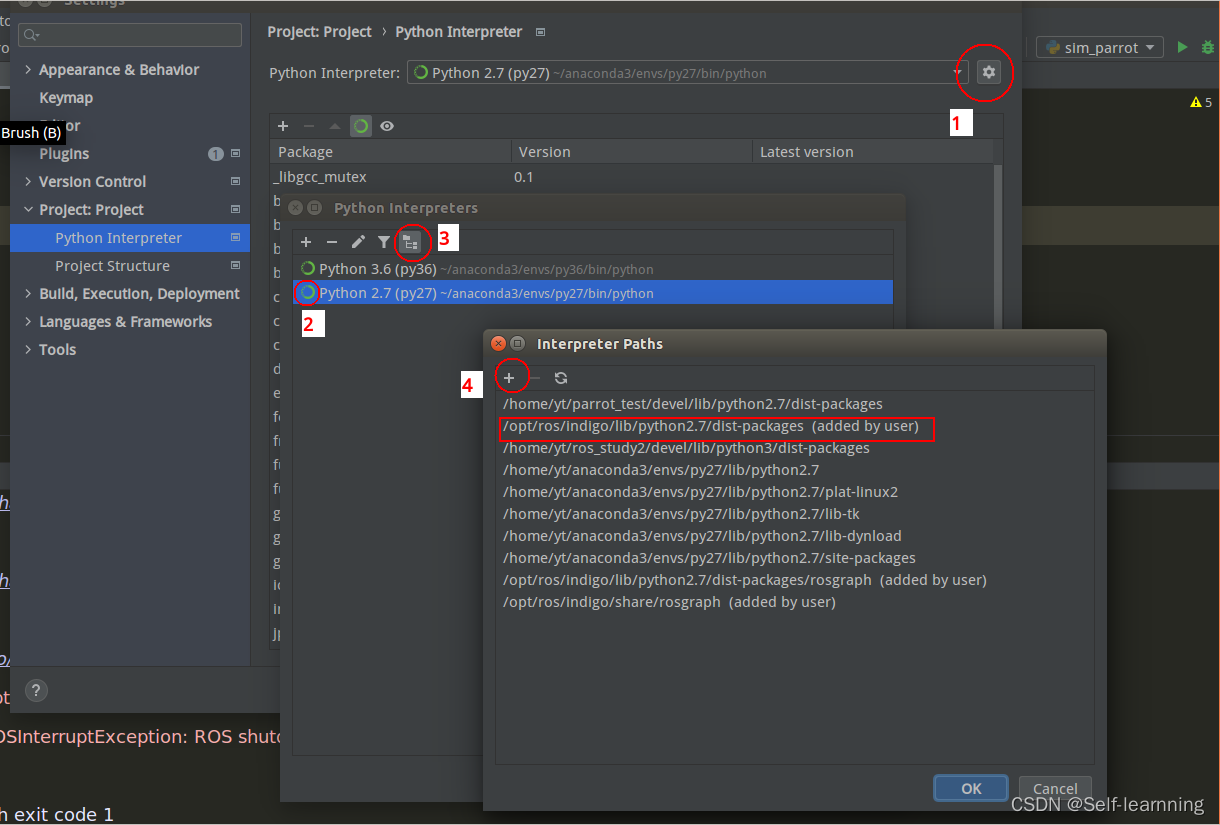
2.2 解决方法:
1.配置路径:File->Settings->Project Interpreter->右边小齿轮Show All->选中正在使用的python
点击右边最下面的图标,打开Interpreter Path
添加/opt/ros/indigo/lib/python2.7/dist-packages
2.修改PYCHARM启动文件(UBUNTU):
gedit ~/.local/share/applications/jetbrains-pycharm.desktop(有的人可能gedit /usr/share/applications)
找到exec语句:Exec="/usr/lib/pycharm-community/bin/pycharm.sh" %f(修改前)
Exec=bash -i -c "/usr/lib/pycharm-community/bin/pycharm.sh" %f(修改后)
将该文件复制到桌面,右键属性,选择权限,改为可执行文件
至此 桌面会生成一个快捷键。
warning:在使用pycharm2020.1的时候,按以上步骤,发现rosgraph仍然报错,然后卸载 重新安装pycharm2021.1.3版本,问题解决。














 4250
4250











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









