







说明
1、基于距离变换的分水岭是相对于传统的findcontour函数而言的
2、采用的是连通域的方式进行mask图像标定
3、一下代码通过调剂膨胀和腐蚀参数,以及次数,可以分割粘合图片等
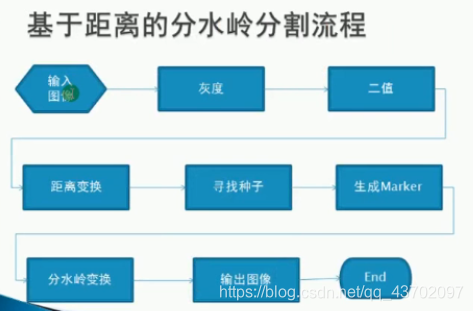
4、处理流程如下图:
#include<iostream>
#include<opencv2/opencv.hpp>
using namespace std;
using namespace cv;
int main()
{
Mat src = imread("000119.jpg");
imshow("src", src);
Rect box(72, 93, 90, 93);
Mat bin_img = Mat::zeros(src.size(), CV_8U);
for (int i = 0; i < src.rows; i++)
{
for (int j = 0; j < src.cols; j++)
{
if ((i<box.y || i 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2015
2015

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









