







前言
为了实现垃圾分类和倾倒功能,于是购买了180度舵机
避坑提示:360度舵机无法像180度舵机一样控制角度,它只能控制旋转方向和速度,所以别买360度的舵机。
1、舵机参数
我买的舵机参数如下:
工作电压:3.5V-6V
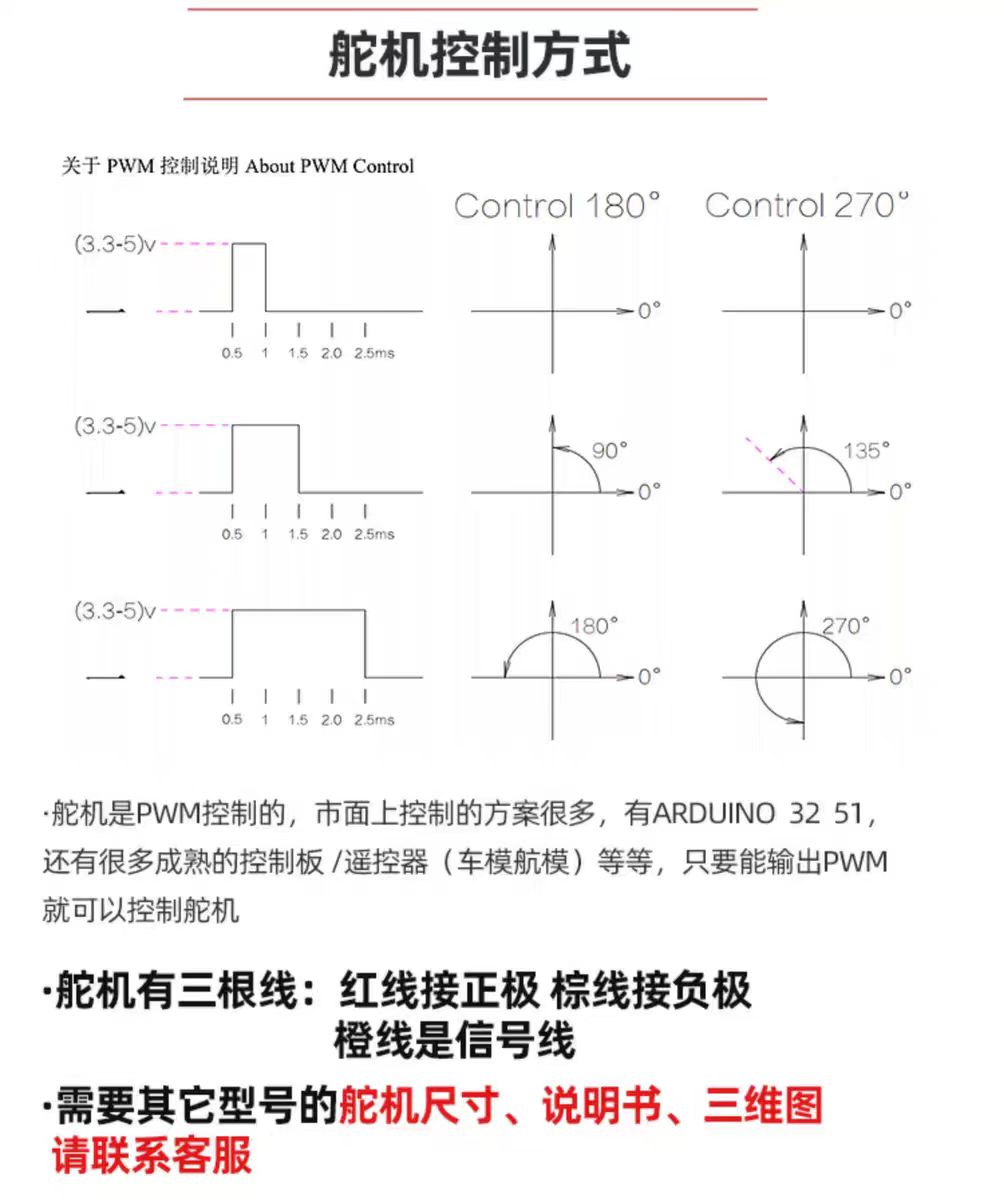
接线:红线(接高电平)、棕线(接地)、橙线(信号线)
工作原理:舵机的控制信号为周期是20ms(频率就是50HZ)的脉宽调制(PWM)信号,其中脉冲宽度从0.5ms-2.5ms,相对应舵盘的位置为0-180度,呈线性变化。也就是说,给它提供一定的脉宽,它的输出轴就会保持在一个相对应的角度上,直到给它提供一个另外宽度的脉冲信号,输出轴才会改变角度。
初始位置(0°) =>脉冲宽度 => 0.5ms => 占空比= 0.5ms / 20ms = 2.5%
中间位置(90°)=> 1.5 ms的脉冲宽度 => 占空比= 1.5ms / 20ms = 7.5%
最终位置(180°)=> 2.5 ms的脉冲宽度 => 占空比= 2.5ms / 20ms => 12.5%
所以占空比范围:2.5%~12.5%
舵机旋转范围0~180度:角度angle和占空比dutyCycle的转换为dutyCycle = 2.5 + angle/180 * 10
**舵机旋转范围0~270度😗*角度angle和占空比dutyCycle的转换为dutyCycle = 2.5 + angle/270 * 10
2、功能测试
说明:
- servo_pin=17,针对是水平方向,输入一个度数,舵机转轴上的指针就水平转到对应的位置。
- servo_pin=18,针对是垂直方向,输入一个度数,舵机转轴上的指针就垂直转到对应的位置。


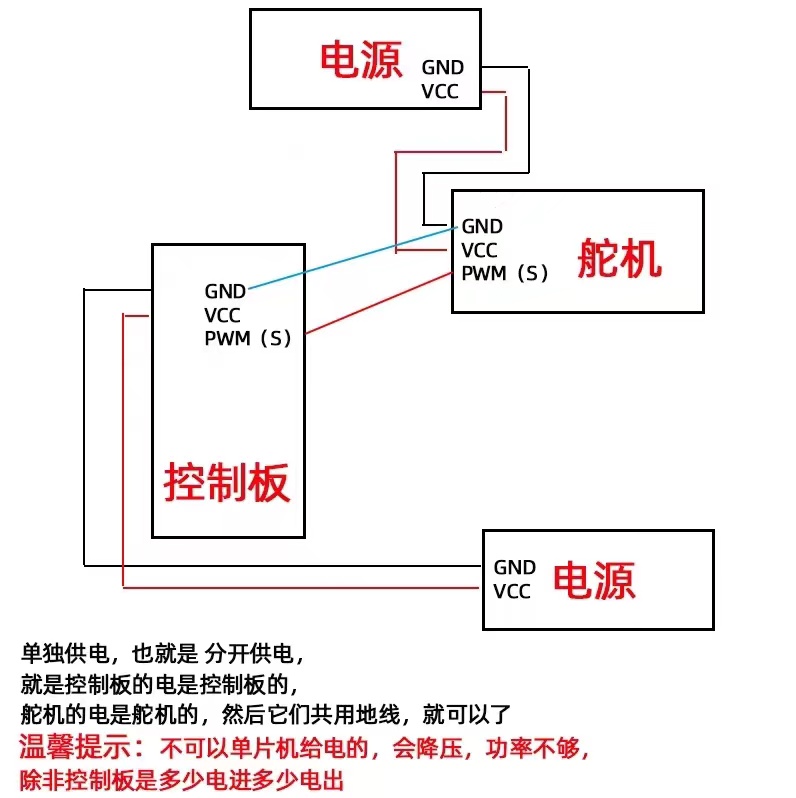

3、舵机使用外部电源供电
碰到问题:舵机使用外部电源供电导致舵机不转或者向一个方向转动直到卡死。
问题原因: 外接电源时的接线图如下,导致舵机和外部供电没有与板子共地。
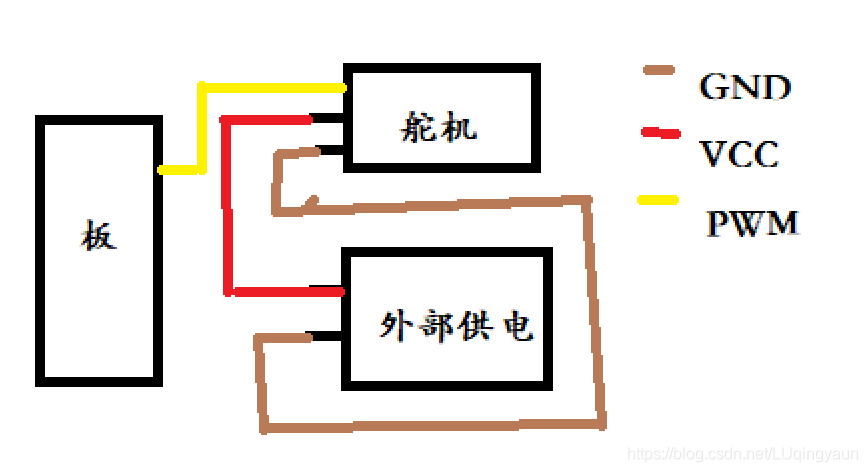
解决办法: 让舵机、外部供电和板子共地,具体如下:

实现控制代码control.py
import RPi.GPIO as GPIO
from time import sleep
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
# servo_pin 舵机信号线接树莓派GPIO17
def complex_change(servo_pin):
GPIO.setup(servo_pin, GPIO.OUT, initial = False)
p = GPIO.PWM(servo_pin, 50) # 初始频率为50HZ
p.start(angleToDutyCycle(90)) # 舵机初始化角度为90,p.start(5.833)
sleep(0.5)
p.ChangeDutyCycle(0) # 清空当前占空比,使舵机停止抖动
return p
# 水平旋转角度转换到PWM占空比
def angleToDutyCycle(angle):
# 注意,这里舵机的范围 是0到180度,如果舵机的范围是0到270,则需要将180更换为270
return 2.5 + (angle / 180.0 )* 10
# 垂直旋转角度转换到PWM占空比
def angleToDutyCycleVertical(angle):
return 2.5+(angle / 180.0 )* 10
# 270度垂直旋转角度转换到PWM占空比
# 190度 回正
# 90度 下落
#def angleToDutyCycleVertical(angle):
# return (angle / 180.0 )* 10
if __name__ == '__main__':
while True:
angle = int(input('水平旋转度数:'))
# 17 水平转动
p = complex_change(17)
p.ChangeDutyCycle(angleToDutyCycle(angle))
sleep(1.5)
# 18 垂直方向回正
p = complex_change(18)
# 90度 下落
p.ChangeDutyCycle(angleToDutyCycleVertical(90))
sleep(0.5)
# 190度 回正
p.ChangeDutyCycle(angleToDutyCycleVertical(190))
sleep(0.1)
p.ChangeDutyCycle(0) # 清空当前占空比,使舵机停止抖动
舵机初始角度为90度,你可以把转轴上面的指针调到垂直方向,表示90度

|

|

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









