







文章目录
一、原理
论文地址:MobileNetV4 - Universal Models for the Mobile Ecosystem
官方代码: MobileNetV4代码仓库
**MobileNetV4(MNv4)**是最新一代的MobileNet,其核心原理在于实现了跨各种移动设备的高效性能,旨在优化各种移动设备的性能。它引入了通用倒瓶颈(UIB)搜索块,这是一种统一且灵活的结构,结合了倒瓶颈、ConvNext、前馈网络(FFN)和新的额外深度可分离卷积(ExtraDW)变体。与此同时,MobileNetV4还推出了专为移动加速器优化的Mobile MQA注意力块,提高了39%的推理速度。通过改进的神经架构搜索(NAS)方法,MobileNetV4显著提高了搜索效率,创建了在CPU、DSP、GPU以及专用加速器(如Apple Neural Engine和Google Pixel EdgeTPU)上表现优异的模型。此外,MobileNetV4还采用了一种新的蒸馏技术,进一步提高了模型的准确性。整体上,MobileNetV4通过整合UIB、Mobile MQA和改进的NAS方法,成功打造出一系列在移动设备上表现最优的模型,兼顾计算效率和精度,实现了在多种硬件平台上的帕累托最优性能。
以下是其架构背后的关键原则和组件:
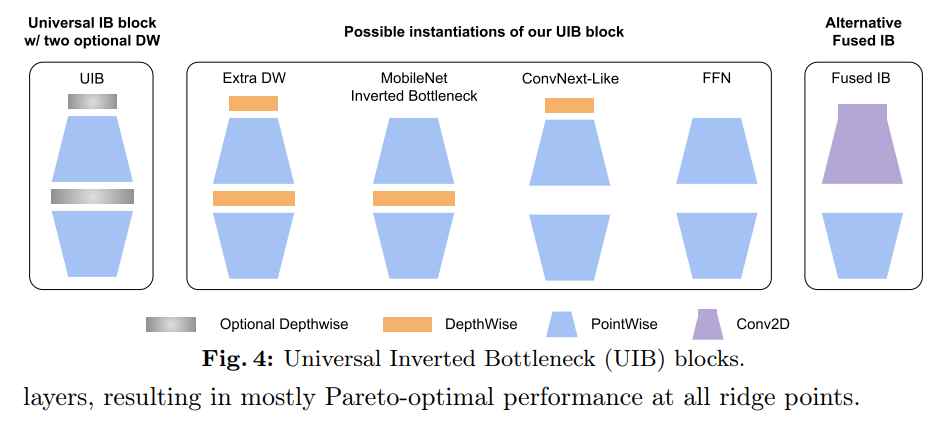
1)通用倒置瓶颈 (UIB)
- 倒置瓶颈块:MobileNetV4 以倒置瓶颈 (IB) 块的成功为基础,这是之前 MobileNets 的核心功能。
- 灵活性和统一性:UIB 结合了多种微架构,包括倒置瓶颈、ConvNext、前馈网络 (FFN) 和创新的额外深度 (ExtraDW) 变体。这种统一使其能够有效地处理不同类型的操作。
- 可选深度卷积:UIB 包括可选深度卷积,可增强其混合空间和通道信息的计算效率和灵活性。
2)移动 MQA(移动量化注意力)
- 效率:此注意力模块专门针对移动加速器进行了优化,与传统的多头注意力 (MHSA) 相比,推理速度显著提高了 39%。
- 移动设备上的性能:移动 MQA 模块经过量身定制,可充分利用移动硬件的功能,确保更快的处理速度和更低的延迟。
3)神经架构搜索 (NAS)
- 优化的搜索方案:MobileNetV4 引入了一种改进的 NAS 流程,其中包括一个两阶段方法:粗粒度搜索和细粒度搜索。此方法提高了搜索过程的效率和有效性,从而可以创建高性能模型。
- 硬件感知:NAS 方法考虑了各种移动硬件平台的限制和功能,确保生成的模型针对各种设备进行了优化,从 CPU 到专用加速器,如 Apple Neural Engine 和 Google Pixel EdgeTPU。
4)蒸馏技术
- 准确度增强:MobileNetV4 采用了一种新颖的蒸馏技术,该技术使用具有不同增强的混合数据集和平衡的类内数据。该技术提高了模型的泛化能力和准确性。
- 性能:通过这种蒸馏技术增强的 MNv4-Hybrid-Large 模型在 ImageNet-1K 上实现了令人印象深刻的 87% 的准确率,在 Pixel 8 EdgeTPU 上的运行时间仅为 3.8 毫秒。
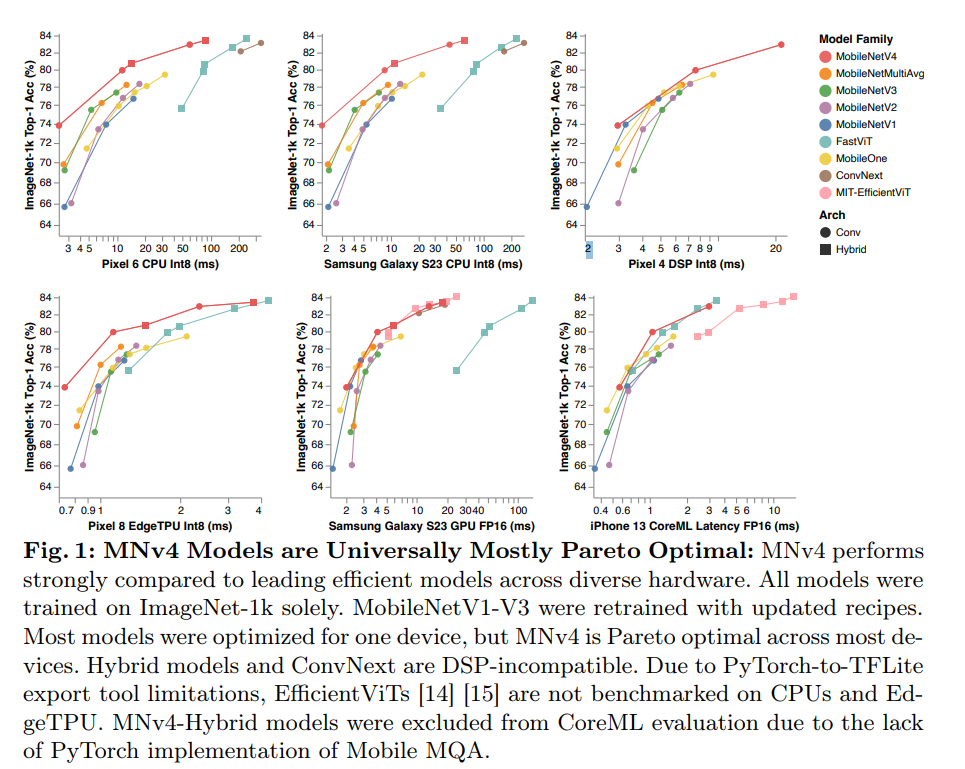
5)帕累托最优
- 性能平衡:MobileNetV4 模型旨在在各种硬件平台上实现帕累托最优,这意味着它们在计算效率和准确性之间提供了最佳平衡。
- 独立于硬件的效率:这些模型经过测试,证明在不同类型的硬件上表现良好,从 CPU 和 GPU 到 DSP 和专用加速器,使其用途广泛且适用性广泛。
6)设计考虑
- 运算强度:MobileNetV4 的设计考虑了不同硬件的运算强度,平衡了计算负载和内存带宽,以最大限度地提高性能。
- 层优化:MobileNetV4 的初始层设计为计算密集型,以提高模型容量和准确性,而最终层则专注于即使在高 RP(脊点)硬件上也能保持准确性。
总之,MobileNetV4 集成了先进的技术和创新,创建了一系列在各种移动设备上都高效准确的模型。其设计原则强调灵活性、硬件感知优化以及计算效率和模型性能之间的平衡。
二、YOLOv5 添加 MobileNetV4 模块
MobileNetV4处理图像的主要步骤可以概括为以下几个关键阶段:
1)图像预处理
在输入模型之前,图像会经过一些预处理步骤,这通常包括:
- **缩放:**将图像调整到指定的输入大小(如224x224)。
- **归一化:**对图像像素值进行归一化处理,使其值在特定范围内(如0到1或-1到1)。
2)初始卷积层
图像首先通过一个标准卷积层,该层具有较大的卷积核(如3x3或5x5),用于捕捉低级别的特征,例如边缘和纹理。这一层通常是计算密集型的,以便在早期捕获更多的信息。
3)倒瓶颈块(Inverted Bottleneck Block)
在MobileNetV4中,倒瓶颈块(IB块)是核心组件之一。每个倒瓶颈块包含以下子步骤:
- **扩展卷积:**首先使用1x1卷积扩展特征图的通道数。
- **深度可分离卷积:**然后使用深度可分离卷积(Depthwise Separable Convolution)在空间维度上进行卷积操作。
- **压缩卷积:**最后通过1x1卷积将通道数压缩回去。
4)通用倒瓶颈块(Universal Inverted Bottleneck, UIB)
MobileNetV4引入了UIB,这种块可以灵活地调整,以适应不同的计算需求:
- **标准倒瓶颈:**与传统倒瓶颈类似,但增加了更多的灵活性。
- **ConvNext变体:**结合了现代卷积架构的优点。
- **前馈网络(FFN):**适用于需要更多非线性变换的场景。
- **额外深度可分离卷积(ExtraDW):**用于提高计算效率和特征提取能力。
5)Mobile MQA注意力块
这个模块是优化后的注意力机制,专门设计用于移动设备:
- **注意力计算:**对特征图进行加权操作,以增强重要特征并抑制不重要的部分。
- **快速推理:**该模块在硬件加速器上实现了快速的推理速度,提高了整体的处理效率。
6)全局平均池化
在最后的卷积层之后,模型会对特征图进行全局平均池化(Global Average Pooling),将特征图转化为固定长度的向量。这一步骤通过取每个特征图的平均值,将空间维度消除,仅保留通道维度的信息。
7)全连接层和分类层
最后,通过全连接层(Fully Connected Layer)和Softmax分类层,将特征向量转换为最终的分类结果。
通过上述步骤,MobileNetV4能够高效地处理和分类输入图像,特别适用于资源受限的移动设备上,同时保证了较高的精度和性能。
2.1 MobileNetV4的代码实现
在yolov5/models/下新建mobilenetv4.py,并粘贴下面的代码
"""
Creates a MobileNetV4 Model as defined in:
Danfeng Qin, Chas Leichner, Manolis Delakis, Marco Fornoni, Shixin Luo, Fan Yang, Weijun Wang, Colby Banbury, Chengxi Ye, Berkin Akin, Vaibhav Aggarwal, Tenghui Zhu, Daniele Moro, Andrew Howard. (2024).
MobileNetV4 - Universal Models for the Mobile Ecosystem
arXiv preprint arXiv:2404.10518.
"""
from typing import Any, Callable, Dict, List, Mapping, Optional, Tuple, Union
import torch
import torch.nn as nn
MNV4ConvSmall_BLOCK_SPECS = {
"conv0": {
"block_name": "convbn",
"num_blocks": 1,
"block_specs": [
[3, 32, 3, 2]
]
},
"layer1": {
"block_name": "convbn",
"num_blocks": 2,
"block_specs": [
[32, 32, 3, 2],
[32, 32, 1, 1]
]
},
"layer2": {
"block_name": "convbn",
"num_blocks": 2,
"block_specs": [
[32, 96, 3, 2],
[96, 64, 1, 1]
]
},
"layer3": {
"block_name": "uib",
"num_blocks": 6,
"block_specs": [
[64, 96, 5, 5, True, 2, 3],
[96, 96, 0, 3, True, 1, 2],
[96, 96, 0, 3, True, 1, 2],
[96, 96, 0, 3, True, 1, 2],
[96, 96, 0, 3, True, 1, 2],
[96, 96, 3, 0, True, 1, 4],
]
},
"layer4": {
"block_name": "uib",
"num_blocks": 6,
"block_specs": [
[96, 128, 3, 3, True, 2, 6],
[128, 128, 5, 5, True, 1, 4],
[128, 128, 0, 5, True, 1, 4],
[128, 128, 0, 5, True, 1, 3],
[128, 128, 0, 3, True, 1, 4],
[128, 128, 0, 3, True, 1, 4],
]
},
"layer5": {
"block_name": "convbn",
"num_blocks": 2,
"block_specs": [
[128, 960, 1, 1],
[960, 1280, 1, 1]
]
}
}
MNV4ConvMedium_BLOCK_SPECS = {
"conv0": {
"block_name": "convbn",
"num_blocks": 1,
"block_specs": [
[3, 32, 3, 2]
]
},
"layer1": {
"block_name": "fused_ib",
"num_blocks": 1,
"block_specs": [
[32, 48, 2, 4.0, True]
]
},
"layer2": {
"block_name": "uib",
"num_blocks": 2,
"block_specs": [
[48, 80, 3, 5, True, 2, 4],
[80, 80, 3, 3, True, 1, 2]
]
},
"layer3": {
"block_name": "uib",
"num_blocks": 8,
"block_specs": [
[80, 160, 3, 5, True, 2, 6],
[160, 160, 3, 3, True, 1, 4],
[160, 160, 3, 3, True, 1, 4],
[160, 160, 3, 5, True, 1, 4],
[160, 160, 3, 3, True, 1, 4],
[160, 160, 3, 0, True, 1, 4],
[160, 160, 0, 0, True, 1, 2],
[160, 160, 3, 0, True, 1, 4]
]
},
"layer4": {
"block_name": "uib",
"num_blocks": 11,
"block_specs": [
[160, 256, 5, 5, True, 2, 6],
[256, 256, 5, 5, True, 1, 4],
[256, 256, 3, 5, True, 1, 4],
[256, 256, 3, 5, True, 1, 4],
[256, 256, 0, 0, True, 1, 4],
[256, 256, 3, 0, True, 1, 4],
[256, 256, 3, 5, True, 1, 2],
[256, 256, 5, 5, True, 1, 4],
[256, 256, 0, 0, True, 1, 4],
[256, 256, 0, 0, True, 1, 4],
[256, 256, 5, 0, True, 1, 2]
]
},
"layer5": {
"block_name": "convbn",
"num_blocks": 2,
"block_specs": [
[256, 960, 1, 1],
[960, 1280, 1, 1]
]
}
}
MNV4ConvLarge_BLOCK_SPECS = {
"conv0": {
"block_name": "convbn",
"num_blocks": 1,
"block_specs": [
[3, 24, 3, 2]
]
},
"layer1": {
"block_name": "fused_ib",
"num_blocks": 1,
"block_specs": [
[24, 48, 2, 4.0, True]
]
},
"layer2": {
"block_name": "uib",
"num_blocks": 2,
"block_specs": [
[48, 96, 3, 5, True, 2, 4],
[96, 96, 3, 3, True, 1, 4]
]
},
"layer3": {
"block_name": "uib",
"num_blocks": 11,
"block_specs": [
[96, 192, 3, 5, True, 2, 4],
[192, 192, 3, 3, True, 1, 4],
[192, 192, 3, 3, True, 1, 4],
[192, 192, 3, 3, True, 1, 4],
[192, 192, 3, 5, True, 1, 4],
[192, 192, 5, 3, True, 1, 4],
[192, 192, 5, 3, True, 1, 4],
[192, 192, 5, 3, True, 1, 4],
[192, 192, 5, 3, True, 1, 4],
[192, 192, 5, 3, True, 1, 4],
[192, 192, 3, 0, True, 1, 4]
]
},
"layer4": {
"block_name": "uib",
"num_blocks": 13,
"block_specs": [
[192, 512, 5, 5, True, 2, 4],
[512, 512, 5, 5, True, 1, 4],
[512, 512, 5, 5, True, 1, 4],
[512, 512, 5, 5, True, 1, 4],
[512, 512, 5, 0, True, 1, 4],
[512, 512, 5, 3, True, 1, 4],
[512, 512, 5, 0, True, 1, 4],
[512, 512, 5, 0, True, 1, 4],
[512, 512, 5, 3, True, 1, 4],
[512, 512, 5, 5, True, 1, 4],
[512, 512, 5, 0, True, 1, 4],
[512, 512, 5, 0, True, 1, 4],
[512, 512, 5, 0, True, 1, 4]
]
},
"layer5": {
"block_name": "convbn",
"num_blocks": 2,
"block_specs": [
[512, 960, 1, 1],
[960, 1280, 1, 1]
]
}
}
MNV4HybridConvMedium_BLOCK_SPECS = {
}
MNV4HybridConvLarge_BLOCK_SPECS = {
}
MODEL_SPECS = {
"MobileNetV4ConvSmall": MNV4ConvSmall_BLOCK_SPECS,
"MobileNetV4ConvMedium": MNV4ConvMedium_BLOCK_SPECS,
"MobileNetV4ConvLarge": MNV4ConvLarge_BLOCK_SPECS,
"MobileNetV4HybridMedium": MNV4HybridConvMedium_BLOCK_SPECS,
"MobileNetV4HybridLarge": MNV4HybridConvLarge_BLOCK_SPECS,
}
def make_divisible(
value: float,
divisor: int,
min_value: Optional[float] = None,
round_down_protect: bool = True,
) -> int:
"""
This function is copied from here
"https://github.com/tensorflow/models/blob/master/official/vision/modeling/layers/nn_layers.py"
This is to ensure that all layers have channels that are divisible by 8.
Args:
value: A `float` of original value.
divisor: An `int` of the divisor that need to be checked upon.
min_value: A `float` of minimum value threshold.
round_down_protect: A `bool` indicating whether round down more than 10%
will be allowed.
Returns:
The adjusted value in `int` that is divisible against divisor.
"""
if min_value is None:
min_value = divisor
new_value = max(min_value, int(value + divisor / 2) // divisor * divisor)
# Make sure that round down does not go down by more than 10%.
if round_down_protect and new_value < 0.9 * value:
new_value += divisor
return int(new_value)
def conv_2d(inp, oup, kernel_size=3, stride=1, groups=1, bias=False, norm=True, act=True):
conv = nn.Sequential()
padding = (kernel_size - 1) // 2
conv.add_module('conv', nn.Conv2d(inp, oup, kernel_size, stride, padding, bias=bias, groups=groups))
if norm:
conv.add_module('BatchNorm2d', nn.BatchNorm2d(oup))
if act:
conv.add_module('Activation', nn.ReLU6())
return conv
class InvertedResidual(nn.Module):
def __init__(self, inp, oup, stride, expand_ratio, act=False):
super(InvertedResidual, self).__init__()
self.stride = stride
assert stride in [1, 2]
hidden_dim = int(round(inp * expand_ratio))
self.block = nn.Sequential()
if expand_ratio != 1:
self.block.add_module('exp_1x1', conv_2d(inp, hidden_dim, kernel_size=1, stride=1))
self.block.add_module('conv_3x3', conv_2d(hidden_dim, hidden_dim, kernel_size=3, stride=stride, groups=hidden_dim))
self.block.add_module('red_1x1', conv_2d(hidden_dim, oup, kernel_size=1, stride=1, act=act))
self.use_res_connect = self.stride == 1 and inp == oup
def forward(self, x):
if self.use_res_connect:
return x + self.block(x)
else:
return self.block(x)
class UniversalInvertedBottleneckBlock(nn.Module):
def __init__(self,
inp,
oup,
start_dw_kernel_size,
middle_dw_kernel_size,
middle_dw_downsample,
stride,
expand_ratio
):
super().__init__()
# Starting depthwise conv.
self.start_dw_kernel_size = start_dw_kernel_size
if self.start_dw_kernel_size:
stride_ = stride if not middle_dw_downsample else 1
self._start_dw_ = conv_2d(inp, inp, kernel_size=start_dw_kernel_size, stride=stride_, groups=inp, act=False)
# Expansion with 1x1 convs.
expand_filters = make_divisible(inp * expand_ratio, 8)
self._expand_conv = conv_2d(inp, expand_filters, kernel_size=1)
# Middle depthwise conv.
self.middle_dw_kernel_size = middle_dw_kernel_size
if self.middle_dw_kernel_size:
stride_ = stride if middle_dw_downsample else 1
self._middle_dw = conv_2d(expand_filters, expand_filters, kernel_size=middle_dw_kernel_size, stride=stride_, groups=expand_filters)
# Projection with 1x1 convs.
self._proj_conv = conv_2d(expand_filters, oup, kernel_size=1, stride=1, act=False)
# Ending depthwise conv.
# this not used
# _end_dw_kernel_size = 0
# self._end_dw = conv_2d(oup, oup, kernel_size=_end_dw_kernel_size, stride=stride, groups=inp, act=False)
def forward(self, x):
if self.start_dw_kernel_size:
x = self._start_dw_(x)
# print("_start_dw_", x.shape)
x = self._expand_conv(x)
# print("_expand_conv", x.shape)
if self.middle_dw_kernel_size:
x = self._middle_dw(x)
# print("_middle_dw", x.shape)
x = self._proj_conv(x)
# print("_proj_conv", x.shape)
return x
def build_blocks(layer_spec):
if not layer_spec.get('block_name'):
return nn.Sequential()
block_names = layer_spec['block_name']
layers = nn.Sequential()
if block_names == "convbn":
schema_ = ['inp', 'oup', 'kernel_size', 'stride']
args = {}
for i in range(layer_spec['num_blocks']):
args = dict(zip(schema_, layer_spec['block_specs'][i]))
layers.add_module(f"convbn_{i}", conv_2d(**args))
elif block_names == "uib":
schema_ = ['inp', 'oup', 'start_dw_kernel_size', 'middle_dw_kernel_size', 'middle_dw_downsample', 'stride', 'expand_ratio']
args = {}
for i in range(layer_spec['num_blocks']):
args = dict(zip(schema_, layer_spec['block_specs'][i]))
layers.add_module(f"uib_{i}", UniversalInvertedBottleneckBlock(**args))
elif block_names == "fused_ib":
schema_ = ['inp', 'oup', 'stride', 'expand_ratio', 'act']
args = {}
for i in range(layer_spec['num_blocks']):
args = dict(zip(schema_, layer_spec['block_specs'][i]))
layers.add_module(f"fused_ib_{i}", InvertedResidual(**args))
else:
raise NotImplementedError
return layers
class MobileNetV4(nn.Module):
def __init__(self, model):
# MobileNetV4ConvSmall MobileNetV4ConvMedium MobileNetV4ConvLarge
# MobileNetV4HybridMedium MobileNetV4HybridLarge
"""Params to initiate MobilenNetV4
Args:
model : support 5 types of models as indicated in
"https://github.com/tensorflow/models/blob/master/official/vision/modeling/backbones/mobilenet.py"
"""
super().__init__()
assert model in MODEL_SPECS.keys()
self.model = model
self.spec = MODEL_SPECS[self.model]
# conv0
self.conv0 = build_blocks(self.spec['conv0'])
# layer1
self.layer1 = build_blocks(self.spec['layer1'])
# layer2
self.layer2 = build_blocks(self.spec['layer2'])
# layer3
self.layer3 = build_blocks(self.spec['layer3'])
# layer4
self.layer4 = build_blocks(self.spec['layer4'])
# layer5
self.layer5 = build_blocks(self.spec['layer5'])
self.features = nn.ModuleList([self.conv0, self.layer1, self.layer2, self.layer3, self.layer4, self.layer5])
self.channel = [i.size(1) for i in self.forward(torch.randn(1, 3, 640, 640))]
def forward(self, x):
input_size = x.size(2)
scale = [4, 8, 16, 32]
features = [None, None, None, None]
for f in self.features:
x = f(x)
if input_size // x.size(2) in scale:
features[scale.index(input_size // x.size(2))] = x
return features
def MobileNetV4ConvSmall():
model = MobileNetV4('MobileNetV4ConvSmall')
return model
def MobileNetV4ConvMedium():
model = MobileNetV4('MobileNetV4ConvMedium')
return model
def MobileNetV4ConvLarge():
model = MobileNetV4('MobileNetV4ConvLarge')
return model
def MobileNetV4HybridMedium():
model = MobileNetV4('MobileNetV4HybridMedium')
return model
def MobileNetV4HybridLarge():
model = MobileNetV4('MobileNetV4HybridLarge')
return model
2.2 新增 yaml文件
在下/yolov5/models下新建文件 **yolov5_MobileNetv4.yaml**并将下面代码复制进去
# YOLOv5 🚀 by Ultralytics, AGPL-3.0 license
# Parameters
nc: 80 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
# YOLOv5 v6.0 backbone
backbone:
# [from, number, module, args]
[[-1, 1, MobileNetV4ConvSmall, []],#4
[-1, 1, SPPF, [1024, 5]], # 5
]
# YOLOv5 v6.0 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 3], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 9
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 2], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 13 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 16 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 5], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 19 (P5/32-large)
[[13, 16, 19], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
2.3 注册模块
替换yolo.py的parse_model函数
def parse_model(d, ch): # model_dict, input_channels(3)
# Parse a YOLOv5 model.yaml dictionary
LOGGER.info(f"\n{'':>3}{'from':>18}{'n':>3}{'params':>10} {'module':<40}{'arguments':<30}")
anchors, nc, gd, gw, act = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple'], d.get('activation')
if act:
Conv.default_act = eval(act) # redefine default activation, i.e. Conv.default_act = nn.SiLU()
LOGGER.info(f"{colorstr('activation:')} {act}") # print
na = (len(anchors[0]) // 2) if isinstance(anchors, list) else anchors # number of anchors
no = na * (nc + 5) # number of outputs = anchors * (classes + 5)
is_backbone = False
layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out
for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, args
try:
t = m
m = eval(m) if isinstance(m, str) else m # eval strings
except:
pass
for j, a in enumerate(args):
with contextlib.suppress(NameError):
try:
args[j] = eval(a) if isinstance(a, str) else a # eval strings
except:
args[j] = a
n = n_ = max(round(n * gd), 1) if n > 1 else n # depth gain
if m in {
Conv, GhostConv, Bottleneck, GhostBottleneck, SPP, SPPF, DWConv, MixConv2d, Focus, CrossConv,
BottleneckCSP, C3, C3TR, C3SPP, C3Ghost, nn.ConvTranspose2d, DWConvTranspose2d, C3x}:
c1, c2 = ch[f], args[0]
if c2 != no: # if not output
c2 = make_divisible(c2 * gw, 8)
args = [c1, c2, *args[1:]]
if m in {BottleneckCSP, C3, C3TR, C3Ghost, C3x}:
args.insert(2, n) # number of repeats
n = 1
elif m is nn.BatchNorm2d:
args = [ch[f]]
elif m is Concat:
c2 = sum(ch[x] for x in f)
# TODO: channel, gw, gd
elif m in {Detect, Segment}:
args.append([ch[x] for x in f])
if isinstance(args[1], int): # number of anchors
args[1] = [list(range(args[1] * 2))] * len(f)
if m is Segment:
args[3] = make_divisible(args[3] * gw, 8)
elif m is Contract:
c2 = ch[f] * args[0] ** 2
elif m is Expand:
c2 = ch[f] // args[0] ** 2
elif isinstance(m, str):
t = m
m = timm.create_model(m, pretrained=args[0], features_only=True)
c2 = m.feature_info.channels()
elif m in {MobileNetV4ConvSmall}:
m = m(*args)
c2 = m.channel
else:
c2 = ch[f]
if isinstance(c2, list):
is_backbone = True
m_ = m
m_.backbone = True
else:
m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module
t = str(m)[8:-2].replace('__main__.', '') # module type
np = sum(x.numel() for x in m_.parameters()) # number params
m_.i, m_.f, m_.type, m_.np = i + 4 if is_backbone else i, f, t, np # attach index, 'from' index, type, number params
LOGGER.info(f'{i:>3}{str(f):>18}{n_:>3}{np:10.0f} {t:<40}{str(args):<30}') # print
save.extend(x % (i + 4 if is_backbone else i) for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
layers.append(m_)
if i == 0:
ch = []
if isinstance(c2, list):
ch.extend(c2)
for _ in range(5 - len(ch)):
ch.insert(0, 0)
else:
ch.append(c2)
return nn.Sequential(*layers), sorted(save)
2.4 替换函数
替换yolo.py的_forward_once函数
def _forward_once(self, x, profile=False, visualize=False):
y, dt = [], [] # outputs
for m in self.model:
if m.f != -1: # if not from previous layer
x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
if profile:
self._profile_one_layer(m, x, dt)
if hasattr(m, 'backbone'):
x = m(x)
for _ in range(5 - len(x)):
x.insert(0, None)
for i_idx, i in enumerate(x):
if i_idx in self.save:
y.append(i)
else:
y.append(None)
x = x[-1]
else:
x = m(x) # run
y.append(x if m.i in self.save else None) # save output
if visualize:
feature_visualization(x, m.type, m.i, save_dir=visualize)
return x
2.5 执行程序
- 自行替换
--data数据集,cfg/classification.yaml - 自行替换
--weights模型权重, weights/yolov5s.pt
nohup python train.py --batch-size 16 --epochs 200 --cfg models/yolov5_mobilenetv4.yaml --data cfg/classification.yaml --weights weights/yolov5s.pt --device 0 > myout.file 2>&1 &
2.6 完整代码
三、目标检测系列文章
- YOLOv5s网络模型讲解(一看就会)
- 生活垃圾数据集(YOLO版)
- YOLOv5如何训练自己的数据集
- 双向控制舵机(树莓派版)
- 树莓派部署YOLOv5目标检测(详细篇)
- YOLO_Tracking 实践 (环境搭建 & 案例测试)
- 目标检测:数据集划分 & XML数据集转YOLO标签
- DeepSort行人车辆识别系统(实现目标检测+跟踪+统计)
- YOLOv5参数大全(parse_opt篇)
- YOLOv5改进(一)-- 轻量化YOLOv5s模型
- YOLOv5改进(二)-- 目标检测优化点(添加小目标头检测)
- YOLOv5改进(三)-- 引进Focaler-IoU损失函数
- YOLOv5改进(四)–轻量化模型ShuffleNetv2
- YOLOv5改进(五)-- 轻量化模型MobileNetv3
- YOLOv5改进(六)–引入YOLOv8中C2F模块
- YOLOv5改进(七)–改进损失函数EIoU、Alpha-IoU、SIoU、Focal-EIOU
- YOLOv5改进(八)–引入Soft-NMS非极大值抑制
- YOLOv5改进(九)–引入BiFPN模块
- 基于YOLOv10的车辆统计跟踪与车速计算应用
- 初探 YOLOv8(训练参数解析)
- YOLOv8不同模型对比和onnx部署详解
- 如何利用YOLOv8训练自己的数据集 && 3种加载模型场景讲解
- YOLOv8改进(一)-- 轻量化模型ShuffleNetV2
- 如何使用Labelimg查看已经标注好的YOLO数据集标注情况
- YOLOv5、YOLOv6、YOLOv7、YOLOv8、YOLOv9、YOLOv10、YOLOv11、YOLOv12的网络结构图

















 4866
4866

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









