






0.1 麦克纳姆轮底盘示意图
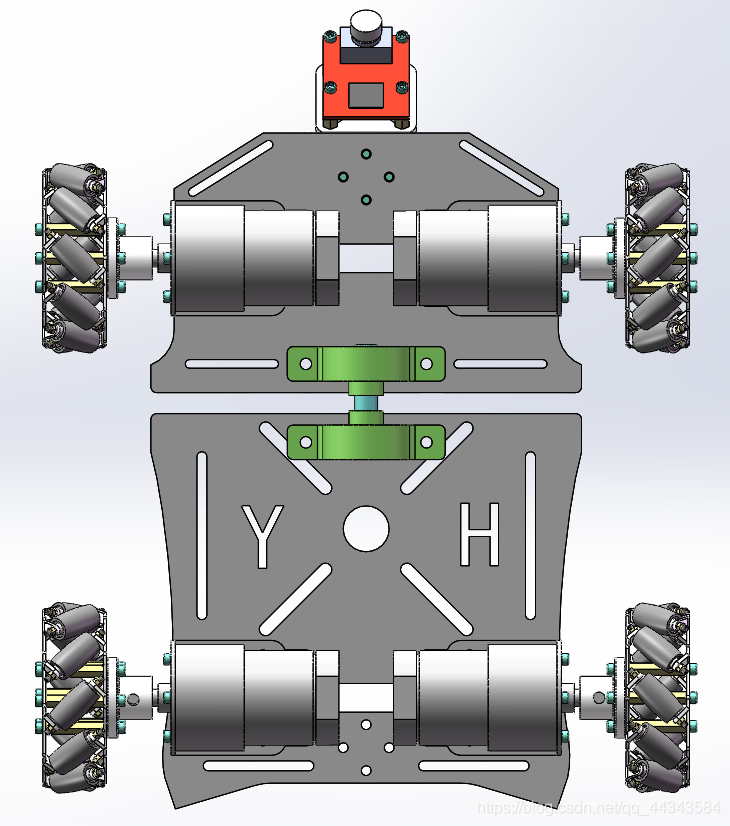
0.2 运动学逆解概念
-逆运动学是决定要达成所需要的姿势所要设置的关节可活动对象的参数的过程。
一、 底盘运动的分解
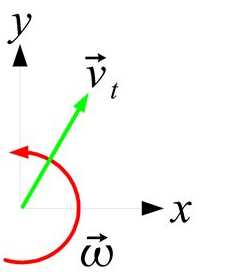
我们知道,刚体在平面内的运动可以分解为三个独立分量:X轴平动、Y轴平动、yaw 轴自转。如下图所示,底盘的运动也可以分解为三个量:
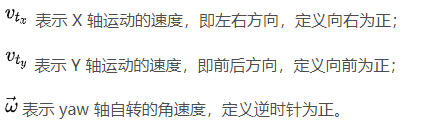
以上三个量一般都视为四个轮子的几何中心(矩形的对角线交点)的速度:
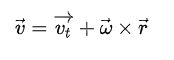
二、计算出轮子轴心位置的速度
定义:
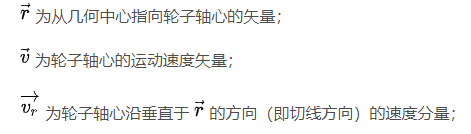
那么可以计算出:
分别计算 X、Y 轴的分量为:

0.1 麦克纳姆轮底盘示意图
0.2 运动学逆解概念
-逆运动学是决定要达成所需要的姿势所要设置的关节可活动对象的参数的过程。
一、 底盘运动的分解
我们知道,刚体在平面内的运动可以分解为三个独立分量:X轴平动、Y轴平动、yaw 轴自转。如下图所示,底盘的运动也可以分解为三个量:
以上三个量一般都视为四个轮子的几何中心(矩形的对角线交点)的速度:
二、计算出轮子轴心位置的速度
定义:
那么可以计算出:
分别计算 X、Y 轴的分量为:

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4603
4603





