







项目:基于 ZYNQ 的 IMX2221 摄像头实时视频流采集传输
章节:IMX222 1080P接收像素的工程代码(四)
本章目的:接受像素代码编写。
在这强烈推荐尤老师V3学院的FPGA教学班:尤老师微信:laokai-yoyo
// -----------------------------------------------------------------------------
// 2022-2030
// -----------------------------------------------------------------------------
// Author : jiangaihui
// -----------------------------------------------------------------------------
module gen_sync(
input wire clk,
input wire rst,
input wire [7:0] bayer,
output wire vsync,
output wire hsync,
output wire [7:0] pixel
);
//-------------------------------------------------------------------------------------------------------------------//
//------------------------------------------Parameter define---------------------------------------------------------//
//-------------------------------------------------------------------------------------------------------------------//
parameter INVSAV =32'hff0000ab;
parameter INVEAV =32'hff0000B6;
parameter VSAV =32'hff000080;
parameter VEAV =32'hff00009d;
parameter WAIT_INVLINE = 5'b0_0001;
parameter WAIT_VLINE = 5'b0_0010;
parameter VSYNC_TIME = 5'b0_0100;
parameter WAIT24_VLINE = 5'b0_1000;
parameter ACTIVE_LINE = 5'b1_0000;
parameter IGNOR_EAVNUM = 24-1;
parameter HCNTMAX = 1920-1+48;
parameter VCNTMAX = 1080-1;
parameter VCNTSTART = 47;
reg [4:0] state;
reg [31:0] shift_reg;
reg invline_flag;
reg vline_flag;
reg invline_sav,invline_eav,vline_sav,vline_eav;
reg [4:0] ignored_line_cnt;
reg [12:0] hcnt,vcnt;
reg vsync_flag;
reg hsync_flag;
//-------------------------------------------------------------------------------------------------------------------//
//------------------------------------------Assign wire--------------------------------------------------------------//
//-------------------------------------------------------------------------------------------------------------------//
assign vsync= vsync_flag;
assign hsync= hsync_flag;
assign pixel= shift_reg[7:0];
//-------------------------------------------------------------------------------------------------------------------//
//--------------------------------------------RTL logic--------------------------------------------------------------//
//-------------------------------------------------------------------------------------------------------------------//
always @(posedge clk) begin
shift_reg <= {shift_reg[23:0],bayer};
end
always @(posedge clk or posedge rst) begin
if (rst == 1'b1) begin
invline_flag <= 1'b0;
end
else if (shift_reg == INVSAV) begin
invline_flag <= 1'b1;
end
else if(shift_reg ==INVEAV) begin
invline_flag <= 1'b0;
end
end
always@(*) begin
if(shift_reg == INVSAV) begin
invline_sav <= 1'b1;
end
else begin
invline_sav <= 1'b0;
end
end
always@(*) begin
if(shift_reg == INVEAV) begin
invline_eav <= 1'b1;
end
else begin
invline_eav <= 1'b0;
end
end
always @(posedge clk or posedge rst) begin
if (rst == 1'b1) begin
vline_flag <= 1'b0;
end
else if (shift_reg == VSAV) begin
vline_flag <= 1'b1;
end
else if(shift_reg ==VEAV) begin
vline_flag <= 1'b0;
end
end
always@(*) begin
if(shift_reg == VSAV) begin
vline_sav <= 1'b1;
end
else begin
vline_sav <= 1'b0;
end
end
always@(*) begin
if(shift_reg == VEAV) begin
vline_eav <= 1'b1;
end
else begin
vline_eav <= 1'b0;
end
end
always @(posedge clk or posedge rst) begin
if (rst == 1'b1) begin
state <= WAIT_INVLINE;
end
else case(state)
WAIT_INVLINE : begin
if(invline_flag == 1'b1) begin
state <= WAIT_VLINE;
end
end
WAIT_VLINE : begin
if(vline_flag == 1'b1) begin
state <= VSYNC_TIME;
end
end
VSYNC_TIME :begin
if(vline_eav) begin
state <= WAIT24_VLINE;
end
end
WAIT24_VLINE : begin
if (ignored_line_cnt == IGNOR_EAVNUM && vline_eav == 1'b1) begin
state <= ACTIVE_LINE;
end
end
ACTIVE_LINE : begin
if(hcnt == HCNTMAX && vcnt == VCNTMAX) begin
state <= WAIT_INVLINE;
end
end
default : begin
state <= WAIT_INVLINE;
end
endcase
end
always @(posedge clk or posedge rst) begin
if (rst == 1'b1) begin
vsync_flag <= 1'b0;
end
else if (state == WAIT_VLINE && vline_flag == 1'b1) begin
vsync_flag <= 1'b1;
end
else if(vline_eav == 1'b1 && state == VSYNC_TIME) begin
vsync_flag <= 1'b0;
end
end
always @(posedge clk or posedge rst) begin
if (rst == 1'b1) begin
ignored_line_cnt <='d0;
end
else if (state == WAIT24_VLINE && vline_eav == 1'b1) begin
ignored_line_cnt <= ignored_line_cnt + 1'b1;
end
else if (state != WAIT24_VLINE) begin
ignored_line_cnt <='d0;
end
end
always @(posedge clk or posedge rst) begin
if (rst == 1'b1) begin
hcnt <= 'd0;
end
else if(state != ACTIVE_LINE)begin
hcnt <='d0;
end
else if(state == ACTIVE_LINE && vline_eav == 1'b1)begin
hcnt <='d0;
end
else if (state == ACTIVE_LINE && vline_flag == 1'b1) begin
hcnt <= hcnt + 1'b1;
end
end
always @(posedge clk or posedge rst) begin
if (rst == 1'b1) begin
vcnt <= 'd0;
end
else if(state != ACTIVE_LINE) begin
vcnt <='d0;
end
else if (state == ACTIVE_LINE && vline_eav == 1'b1) begin
vcnt <= vcnt + 1'b1;
end
end
//hsync_flag
always @(posedge clk or posedge rst) begin
if (rst == 1'b1) begin
hsync_flag <= 1'b0;
end
else if (state == ACTIVE_LINE && hcnt == VCNTSTART) begin
hsync_flag <= 1'b1;
end
else if (state == ACTIVE_LINE && hcnt == HCNTMAX) begin
hsync_flag <= 1'b0;
end
end
endmodule
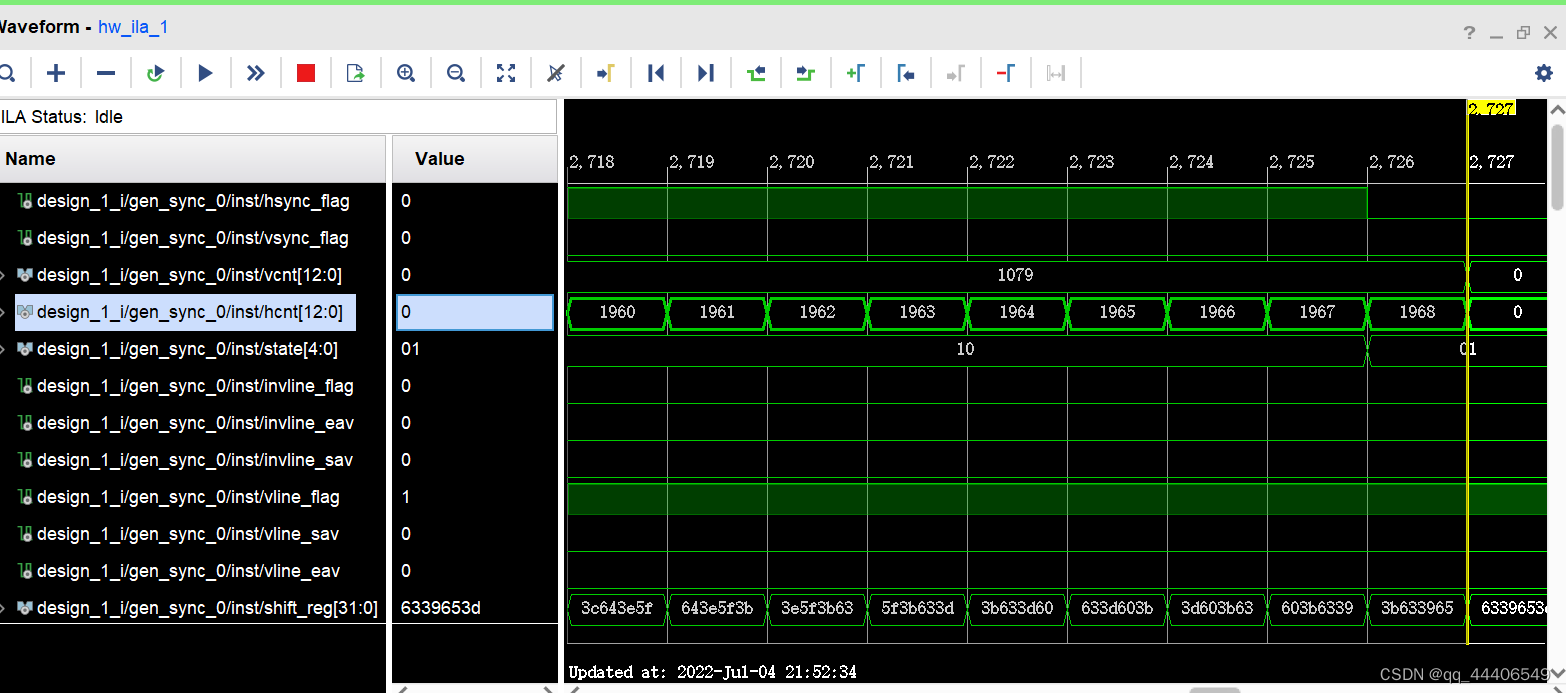
这一部分我通过ila去验证,抓取了每一个信号的变化情况,下面给一个最重要的吧,state 从 1000 到 00001 的状态跳转
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









