







 本文介绍了如何在网页端查看惯导状态,包括组合导航状态值和使用rostopicecho/chcnav/devpvt接口。此外,还详细阐述了惯导设备的配置和标定步骤,如车辆与设备坐标系设定,以及标定过程中对车速、道路环境的要求。
本文介绍了如何在网页端查看惯导状态,包括组合导航状态值和使用rostopicecho/chcnav/devpvt接口。此外,还详细阐述了惯导设备的配置和标定步骤,如车辆与设备坐标系设定,以及标定过程中对车速、道路环境的要求。
一、查看惯导状态
方法:
- 网页端
- 终端
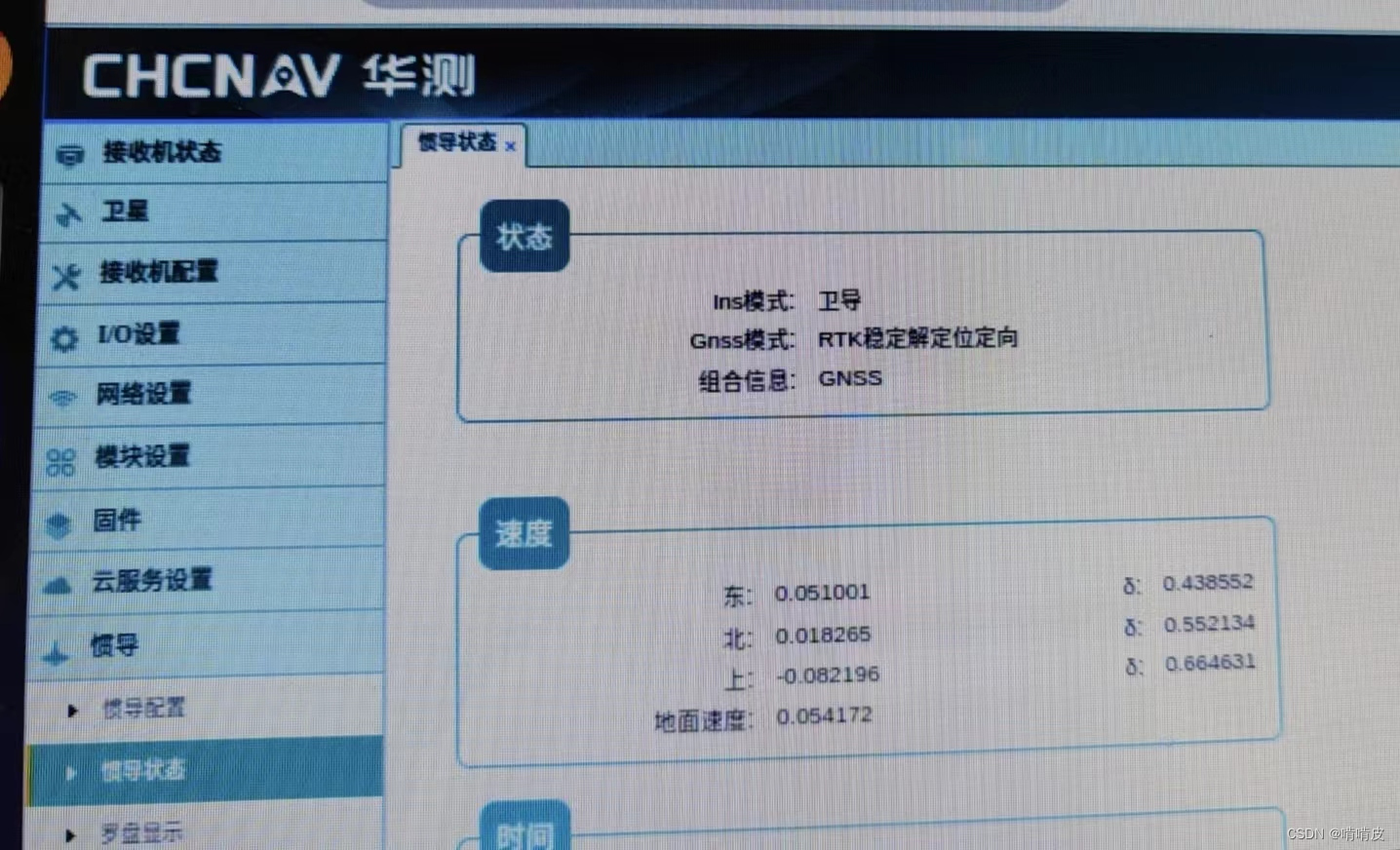
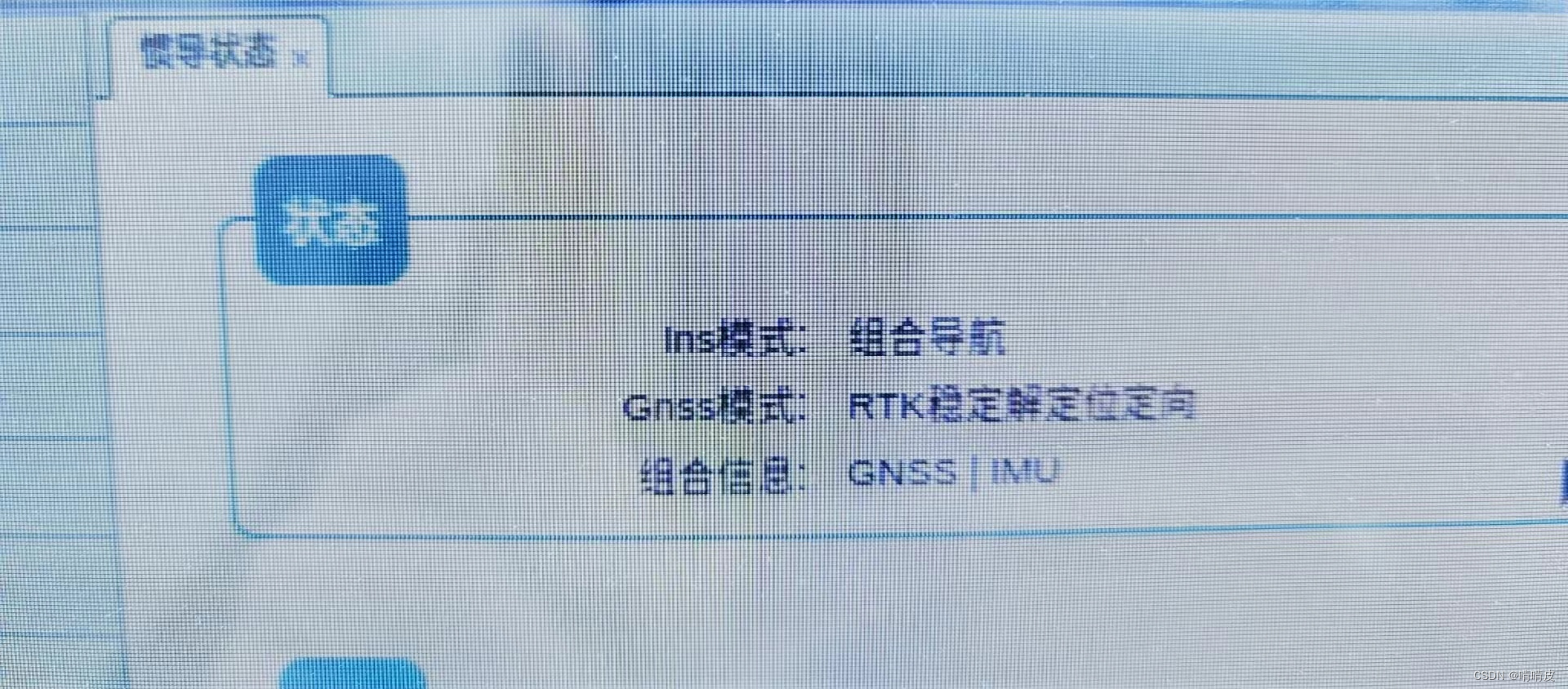
1.网页端
2.终端
通过订阅话题:
rostopic echo /chcnav/devpvt
stat: [1, 6]
状态值说明:

组合导航状态值:[2,4],即组合导航模式,RTK稳定解定位定向
二、配置及标定
具体内容可见:
提取码:zew4
标定说明:车辆坐标系固定为前y,右x,上z,设备坐标系根据具体需要放置;跑车时要求:车速>=0.5m/s,且有加速减速过程,道路为开阔的口字形,顺时针逆时针都要跑,标定时长为三到五分钟。


















 2108
2108

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











