






训练方法
Anaconda训练
先裝好anaconda
创建3DGS的conda环境
conda env create --file environment.yml
在bashrc中加入cuda环境
export PATH=/usr/local/cuda-11.6/bin:$PATH
export LD_LIBRARY_PATH=/usr/local/cuda-11.6/lib64:$LD_LIBRARY_PATH
下载数据
按需下载 T&T+DB COLMAP (650MB) | Pre-trained Models (14 GB) | Viewers for Windows (60MB) | Evaluation Images (7 GB) 等数据。
T&T+DB COLMAP (650MB) :包含了4个场景的图片,并已经通过convert.py进行colmap转换。可以直接用来做train.py训练测试。
Pre-trained Models (14 GB):论文中提到的各种场景的预训练模型。可以通过viewer查看效果
Viewers for Windows (60MB):作者已经编译好的SIBR点云查看工具,不需要按照教程再编译。
Evaluation Images (7 GB) :这是项目训练过程中,同一批数据在不同的算法之下训练出来的场景数据对比图片。
colmap下载(如需使用自己的图片训练):可以从照片集合中进行三维重建,可以识别运动结构 (Structure-from-Motion, SfM)、也可以进行多视图立体 (Multi-View Stereo, MVS)构建。
ImageMagick下载(如需针对自己的图片进行裁剪)。
开始训练
使用刚才下载的T&T+DB COLMAP (650MB) 进行训练测试,验证环境是否正常。
运行以下代码
# 示例代码
python train.py -s <path to COLMAP or NeRF Synthetic dataset> --iterations #迭代次数
# 实际代码
python train.py -s ./DataSet/tandt_db/db/playroom/ --iterations 6000
注意:如果不指定输出目录,默认存储在项目根的output文件中
利用docker容器训练
dockerhub查看需要的镜像
拉取镜像
docker pull zzhopezhou/3dgs:1.1
创建容器
docker run -it --name 3dgs --gpus all -v /home/leador/Dongliiy:/home/leador/Dongliiy c627639e3920 /bin/bash
开始训练
运行以下代码
# 示例代码
python train.py -s <path to COLMAP or NeRF Synthetic dataset> --iterations #迭代次数
# 实际代码
python train.py -s ./DataSet/tandt_db/db/playroom/ --iterations 6000
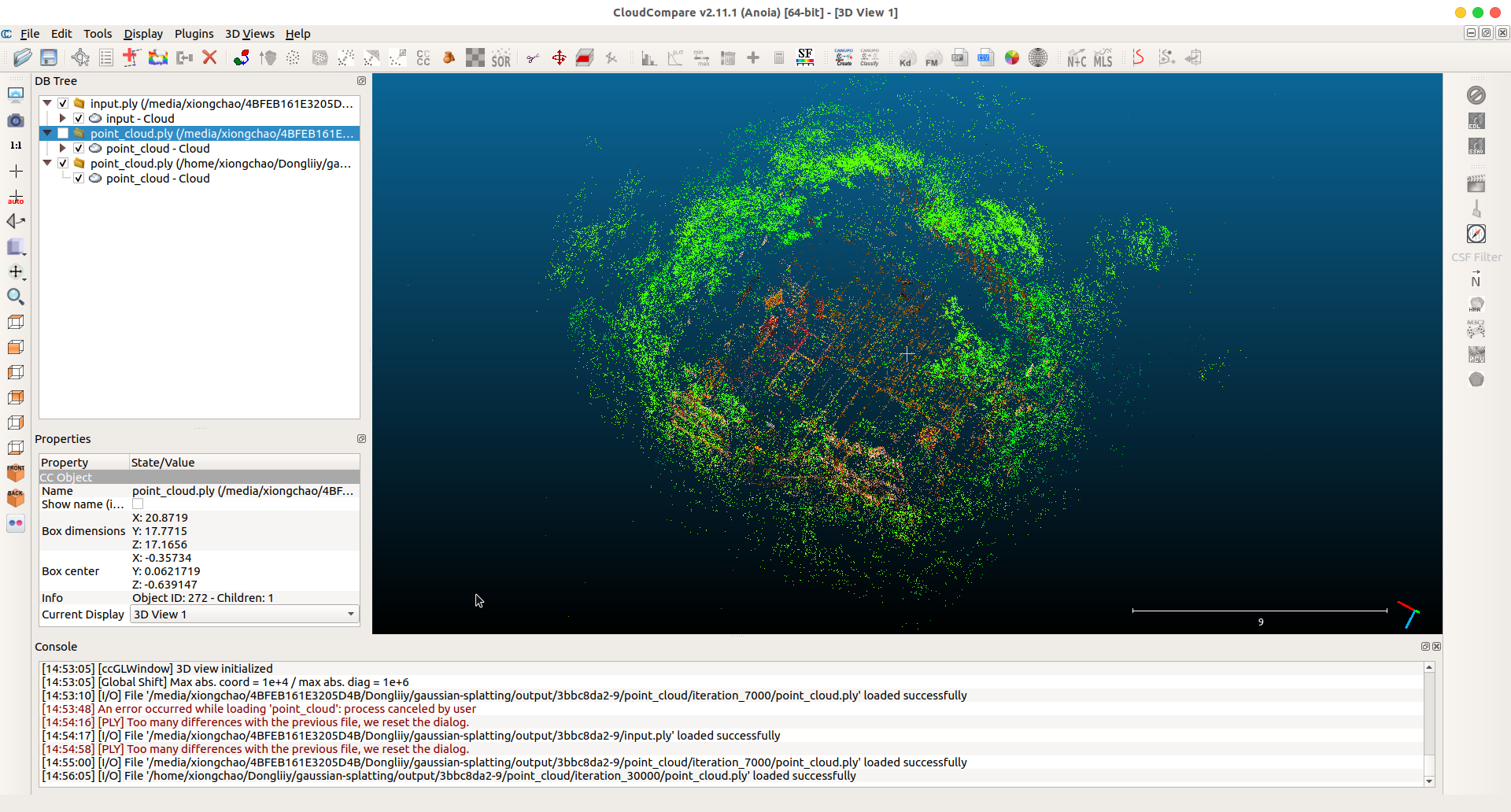
查看结果
Cloudcompare查看点云
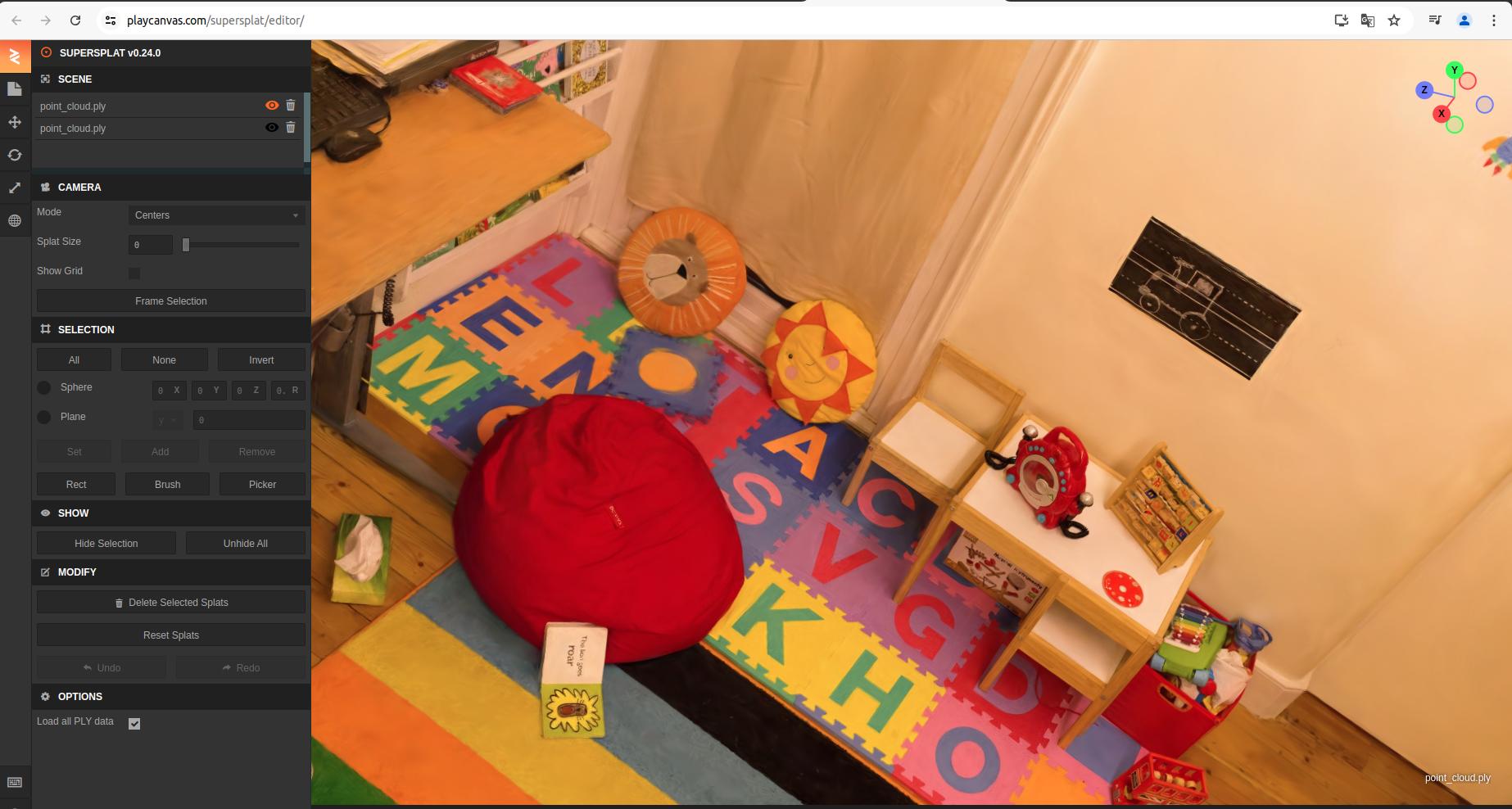
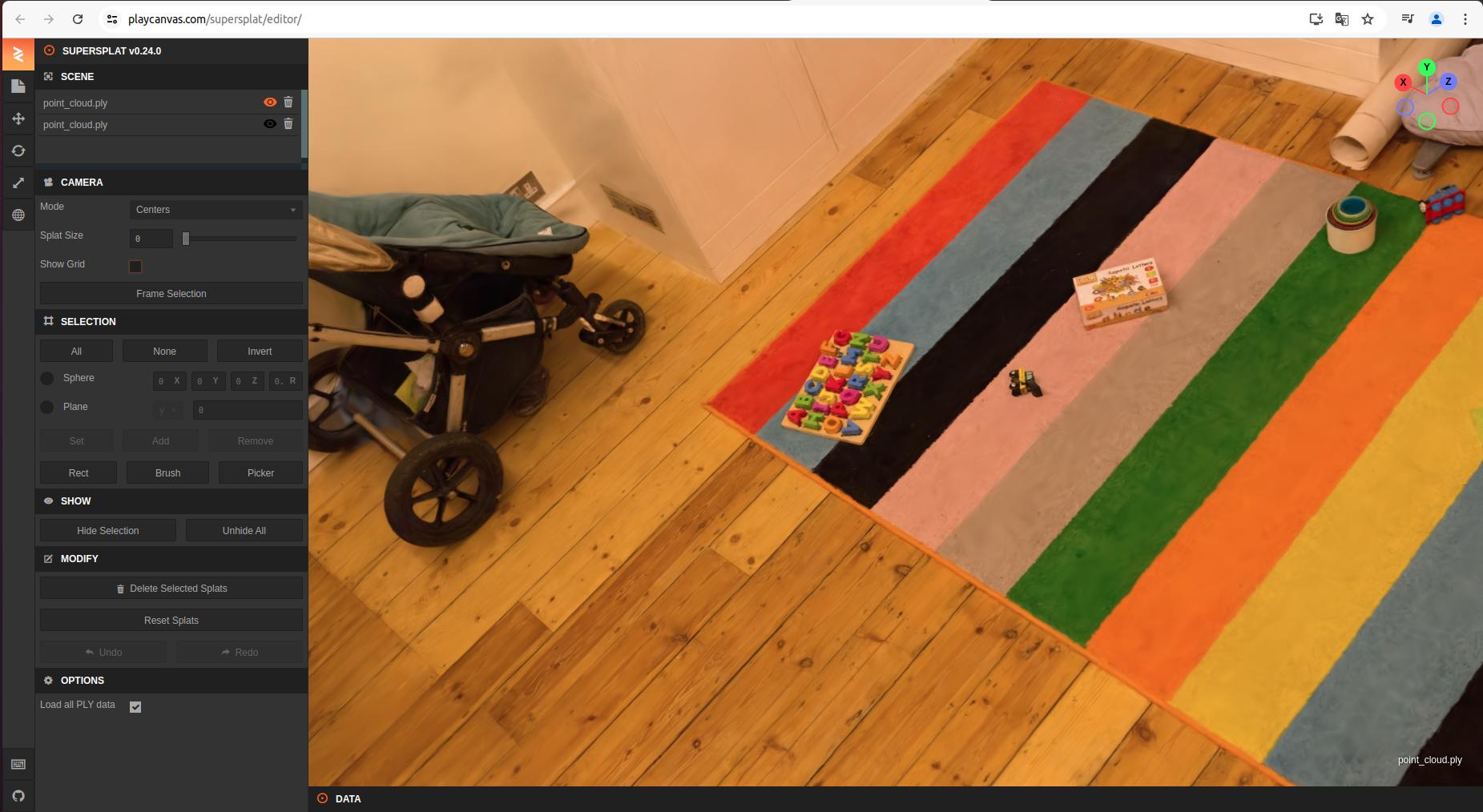
 在线点云查看网站:
在线点云查看网站:
https://playcanvas.com/supersplat/editor/



















 565
565

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









