







 本文档是一篇关于Simscape Multibody的入门教程,详细介绍了如何创建和仿真一个简单的单摆模型。教程涵盖从创建模型、指定重力、设置初始位置到配置求解器和进行仿真的全过程,旨在帮助读者理解如何使用Simscape Multibody进行机械系统建模。
本文档是一篇关于Simscape Multibody的入门教程,详细介绍了如何创建和仿真一个简单的单摆模型。教程涵盖从创建模型、指定重力、设置初始位置到配置求解器和进行仿真的全过程,旨在帮助读者理解如何使用Simscape Multibody进行机械系统建模。
前言
`本人研究生期间正在做机器人轨迹跟踪方向,希望能通过使用Simscape Multibody来做机械臂轨迹跟踪,并用PID或其他方法对机械臂轨迹误差进行修正,因此根据官方文件自学Simscape Multibody,对文档进行翻译,删减,保留本人操作过程来记录学习过程。但由于本人水平有限,文章可能某些地方存在问题,请各位评论指正。
一、创建单摆模型
1.教程概述
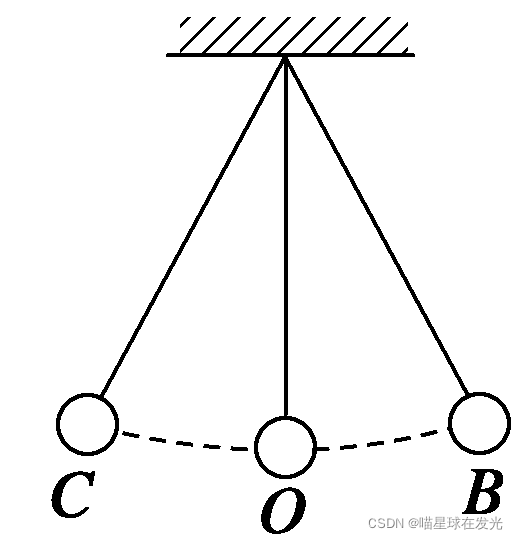
钟摆是最简单的机械系统。 该系统包含两个刚体,一个连杆和一个固定枢轴,通过转动关节连接。 在本教程中,将使用上一篇单连杆模型创建的自定义模块对钟摆进行建模和仿真。 Revolute Joint 模块提供连杆和世界坐标系之间的旋转自由度。
2.构建模型
1.在MATLAB命令行输入smnew。打开Simscape Multibody模块库和具有常用模块的模板。
2. 删除Simulink-PS Converter, PS-Simulink Converter, Scope,和 Rigid Transform模块。
3. 将单连杆模型中创建的子系统拖动到该模型中,命名为Simple Link。
4. 在 Simscape >Multibody > Joints库中找到Revolute Joint模块并将其拖动到模
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2639
2639

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











