







 这篇博客介绍了如何在MATLAB的Simscape环境中创建一个多体模型,特别是构建一个单连杆模型。从研究模型系统到实体建模,再到组装多体系统和指定动态变量,详细讲解了每个步骤。此外,还阐述了如何准备模型,启动新模型,以及通过Simscape Multibody模块库选择所需模块。最后,通过逐步指导创建、参数设置和模型可视化,帮助读者理解单连杆模型的建模过程。
这篇博客介绍了如何在MATLAB的Simscape环境中创建一个多体模型,特别是构建一个单连杆模型。从研究模型系统到实体建模,再到组装多体系统和指定动态变量,详细讲解了每个步骤。此外,还阐述了如何准备模型,启动新模型,以及通过Simscape Multibody模块库选择所需模块。最后,通过逐步指导创建、参数设置和模型可视化,帮助读者理解单连杆模型的建模过程。
一、创建多体模型
- 步骤一:研究模型的系统。确定要在模型中合并的相关主体、关节和约束条件。考虑作用于物体之间或直接作用在关节处的力和扭矩。
- 步骤二:对实体建模。指定各实体的属性。 将坐标系添加到实体,以便可以连接关节和约束、施加力和扭矩以及感知运动。
- 步骤三:组装多体系统。通过关节成对地连接实体。通过齿轮和其他运动学约束来约束实体的运动。
- 步骤四:指定并感知动态变量。模拟外部载荷、实体之间的相互作用和联合驱动输入。感知力、力矩和运动变量作为时间的函数。
二、创建模型准备工作
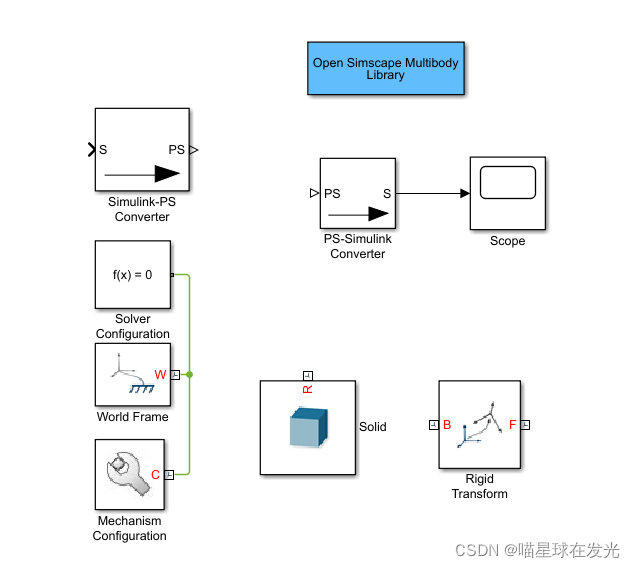
可以直接通过在MATLAB命令提示符中输入smnew,启动一个新的Simscape Multibody模型。smnew函数打开一个带有常用模块和最佳性能的变步长自动求解器的Simscape Multibody模型模板。下图显示了该模板。
>>smnew
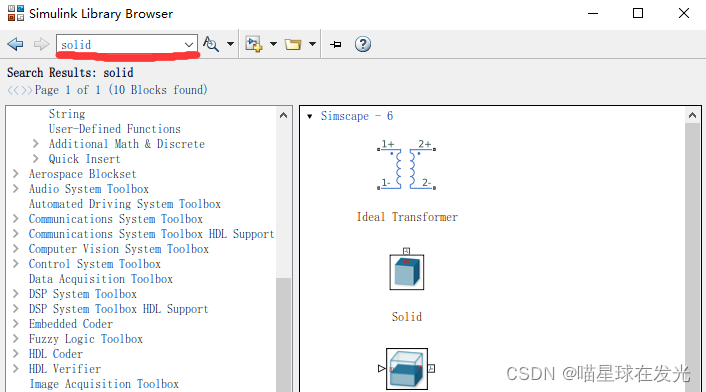
还可以通过直接在MATLAB命令提示符中输入sm_lib打开Simscape Multibody模块库。浏览该模块库来给你的模型选择所需的模块。或者,在Simulink Model window中输入模块名,并从搜索结果中选择匹配项。
>>sm_lib
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 4988
4988

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











