







自动驾驶仿真调研
一、自动驾驶技术栈都有哪些?

二、为什么需要仿真?
- 随着现在深度学习的兴起,仿真在自动驾驶领域有了新的用武之地。自动驾驶平台通过仿真采集数据,可以把训练时间大大提高,远远超出路测的时间,加快模型迭代速度。先利用集群训练模型,然后再到实际的路测中去检验,采用数据驱动的方式来进行自动驾驶研究。
- 验证新的算法,仿真通过软件模拟来发现和复现问题,而不需要真实的环境和硬件,可以极大的节省成本和时间。
三、如何进行仿真?
- 要模拟车所在的环境,就得把真实世界投影到虚拟世界,并且需要构造真实世界的物理规律。
- 把自动驾驶中的场景复制到游戏世界,然后模拟自动驾驶中各种传感器采集游戏世界中的数据。
四、有哪些主流的仿真软件?
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-PBtnRYE8-1628497591862)(/Users/zengjiawei/Library/Application%20Support/typora-user-images/image-20210806154618399.png)]
五、仿真模拟的是自动驾驶的哪些部分?
- 传感器数据
- 摄像头深度信息
- 摄像头场景分割
- 摄像头长短焦
- Lidar点云
- Radar毫米波
- Gps信息
- 真实世界物理规律
- 碰撞检测
- 光线和天气变化
- 汽车动力学模型
- 真实世界地图
- 地形地貌
- 道路交通
- 交通标志
- 行人等各种因素
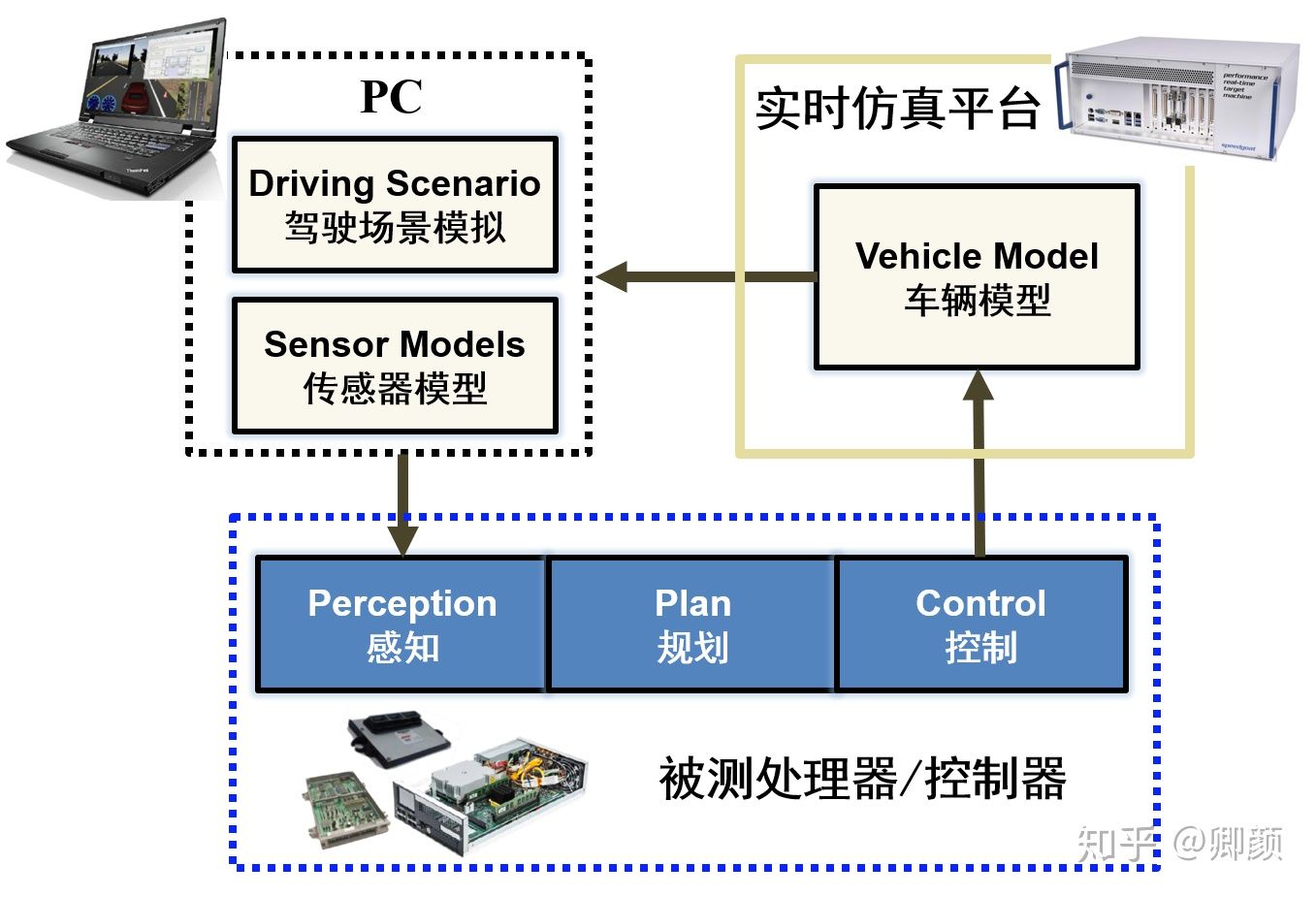
六、目前自动驾驶仿真基础实现是怎样的?
目前主流的实现方式是通过游戏引擎来模拟真实环境,通过CarSim等软件构建汽车的动力学模型来实现自动驾驶仿真。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 6695
6695











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









