







 该教程详细介绍了如何将FS-i6X遥控器与FS-iA10B接收机设置为SBUS协议,以配合PX4飞控系统的10通道需求。首先,在遥控器上选择PPM输出模式和S.BUS串行总线,开启所有辅助通道。然后,正确连接接收机与飞控的信号线。最后,通过MissionPlanner软件确认接收机的10通道信号接收情况。
该教程详细介绍了如何将FS-i6X遥控器与FS-iA10B接收机设置为SBUS协议,以配合PX4飞控系统的10通道需求。首先,在遥控器上选择PPM输出模式和S.BUS串行总线,开启所有辅助通道。然后,正确连接接收机与飞控的信号线。最后,通过MissionPlanner软件确认接收机的10通道信号接收情况。
富斯遥控器FS-i6X拥有10通道输出,富斯接收机FS-iA10B拥有10通道输入,两者都有PWM/PPM/iBUS/SBUS协议,但是PPM和iBUS协议最高只支持8通道,而SBUS协议可以支持10通道甚至以上。
那么接下来以我的无人机为例,进行SBUS设置教程。
我的无人机飞控为PX4,遥控器为FS-i6X,接收机为FS-iA10B。
(1)设置遥控器:
长按OK键,进入设置界面。

左侧UP,DOWN选择,按下OK,进入系统菜单。

向下翻找,选择接收机设置。

再次向下翻找,选择输出模式。

输出选择PPM、串行总线选择S.BUS,长按CANCEL保存并退出。

在系统内,选择辅助开关设置。

将6个辅助通道全部打开,下方通道数设置为10,长按CANCEL保存并退出。

(2)接收机连线:
母对母3Pin杜邦线黑线为GND,红线为VCC,白线为信号线。一端连接i.BUS的SERVO接口,注意线序;另外一段连接PX4的RC端口,黑线在上,白线在下。


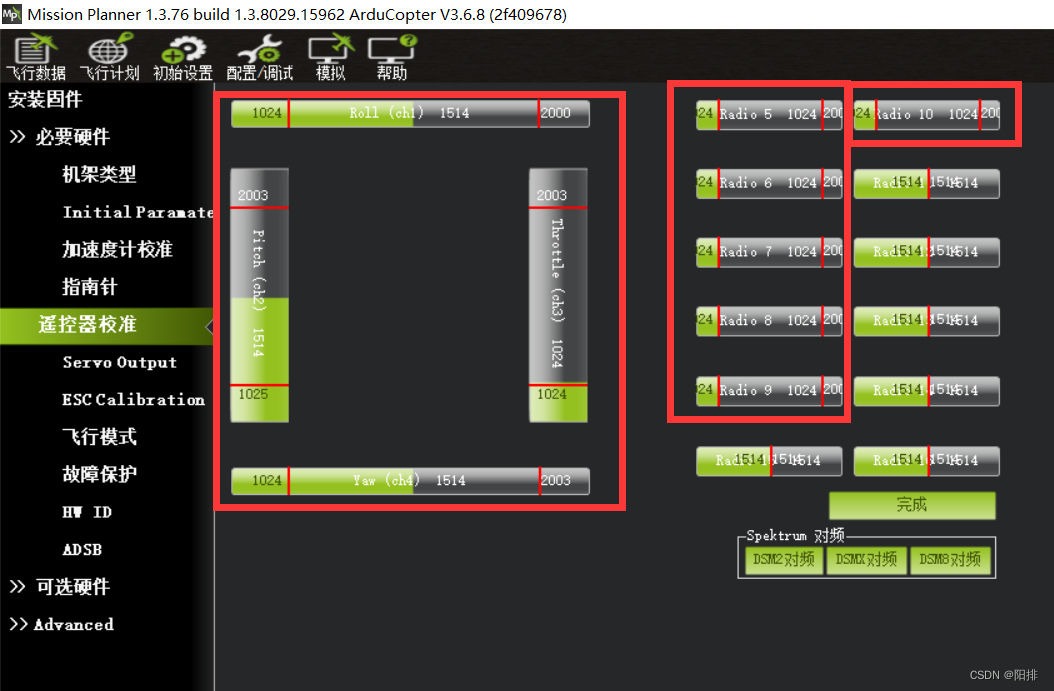
(3)使用MissionPlanner查看信号接收情况。
PX4使用USB线连接电脑,打开MissionPlanner,右上角连接无人机。
进入初始设置,必要硬件,遥控器校准,点击右下角的校准遥控器,点击OK,拨动一下遥控器摇杆和旋钮,就可以看到10个通道都有信号了。

















 710
710

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









