










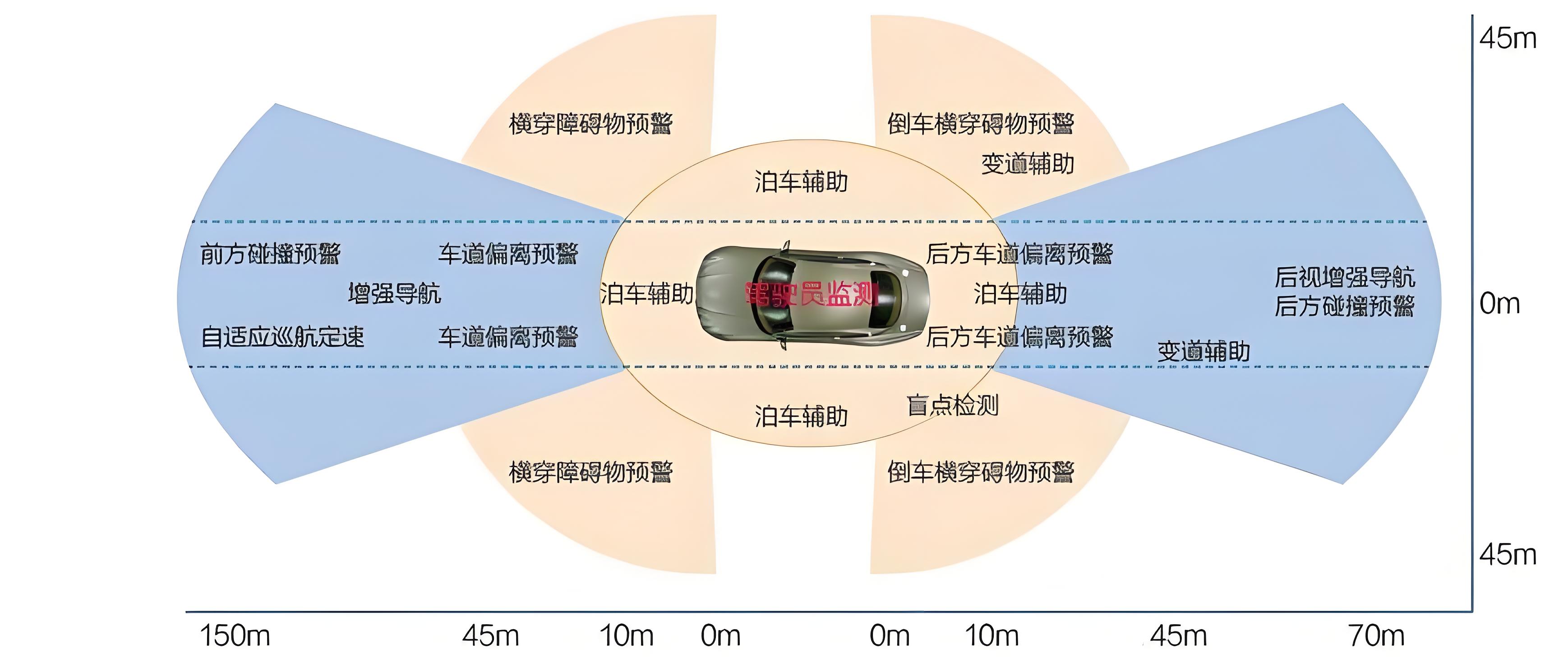
ADAS 高级驾驶辅助系统(Advanced Driving Assistance System)是利用安装在车上的各式各样传感器(毫米波雷达、激光雷达、单\双目摄像头以及卫星导航),在汽车行驶过程中随时来感应周围的环境,收集数据,进行静态、动态物体的辨识、侦测与追踪,并结合导航地图数据,进行系统的运算与分析,从而预先让驾驶者察觉到可能发生的危险,有效增加汽车驾驶的舒适性和安全性
1. ADAS(高级驾驶辅助系统,Advanced Driver Assistance System)
定义:
ADAS 是通过传感器、摄像头、雷达等技术实现的辅助驾驶功能集合,旨在提升驾驶安全性和舒适性,但需驾驶员全程监控。
基础功能:
-
ACC(自适应巡航控制):自动调整车速保持与前车距离。
-
LKA(车道保持辅助):自动纠正方向盘以维持车道内行驶。
-
AEB(自动紧急制动):检测碰撞风险并主动刹车。
-
BSD(盲点监测):监测盲区车辆并提醒驾驶员。
进阶功能:
- TJA(交通拥堵辅助):低速下自动跟车和车道居中。
- IPA(智能泊车辅助):自动识别车位并完成泊车。
技术架构:
- 传感器:摄像头、毫米波雷达、超声波雷达。
- 计算平台:低算力ECU(如Mobileye EyeQ系列)。
- 算法:基于规则的传统控制算法,依赖预编程逻辑。
2. NOA(导航辅助驾驶,Navigate on Autopilot)
定义:
NOA 是特斯拉推出的高阶辅助驾驶功能,可在高速公路或快速路上实现从入口到出口的自动导航驾驶,需驾驶员监督。
高速NOA:
- 自动变道超车、匝道汇入/汇出。
- 根据导航路线切换车道。
交互功能:
- 驾驶员确认变道(部分版本支持自动执行)。
- 交通灯识别(部分城市道路延伸)
技术架构:
- 传感器:纯视觉方案(8-12个摄像头)。
- 计算平台:自研FSD芯片(HW3.0/HW4.0)。
- 算法:BEV(鸟瞰图)+ Transformer神经网络,依赖高精度地图(部分场景)。
3. NOP(领航辅助驾驶,Navigate on Pilot)
定义:
NOP 是蔚来汽车推出的导航辅助驾驶系统,覆盖高速和部分城市快速路,允许车辆自动完成车道选择、超车和进出匝道。
高速NOP:
- 自动超车、避让慢车。
- 匝道智能调速(根据曲率调整车速)。
- 城市NOP(部分版本):
- 无保护左转、复杂路口通行。
- 施工路段临时绕行。
技术架构:
- 传感器:1颗激光雷达(如Innovusion)、多摄像头、毫米波雷达。
- 计算平台:NVIDIA Orin-X芯片(1016 TOPS)。
- 算法:多模态融合感知(激光雷达+视觉),高精地图依赖度较高。
4. 全场景智驾(Full-scenario Autonomous Driving)
定义:
覆盖城市、高速、泊车等全场景的高阶自动驾驶功能,目标是实现“端到端”自动驾驶,驾驶员仅需在系统请求时接管。
全场景覆盖:
- 城市道路:无保护左转、行人避让、加塞处理。
- 高速公路:自动变道、超车、进出服务区。
- 停车场:跨楼层记忆泊车、召唤功能。
极端场景处理:
- 临时施工绕行、夜间逆光行驶、暴雨天气通行。
技术架构:
- 传感器:多激光雷达(如速腾聚创M1)、4D毫米波雷达、高分辨率摄像头。
- 计算平台:高算力域控制器(如华为MDC 810,400+ TOPS)。
- 算法:端到端AI模型(如BEV+Transformer+Occupancy Network),无图化技术。
技术架构演进路径
ADAS:
核心:分散式ECU,功能独立(如AEB、ACC各由单独模块控制)。
局限:场景碎片化,无法处理复杂交互。
NOA/NOP:
核心:集中式域控制器,多传感器融合,依赖高精地图。
突破:实现路径连续规划,但仍需高精地图支持。
全场景智驾:
核心:无图化+端到端AI,通过Occupancy Network动态建模环境。
趋势:摆脱高精地图,依赖实时感知与AI泛化能力。
区别:

总结
ADAS:安全辅助基石,功能独立但场景受限。
NOA/NOP:高阶导航辅助,依赖特定场景与地图。
全场景智驾:技术终极形态,需突破长尾场景与成本瓶颈。
行业方向:从“功能叠加”转向“场景贯通”,最终通过数据闭环与AI迭代实现完全自动驾驶。


















 920
920

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











