










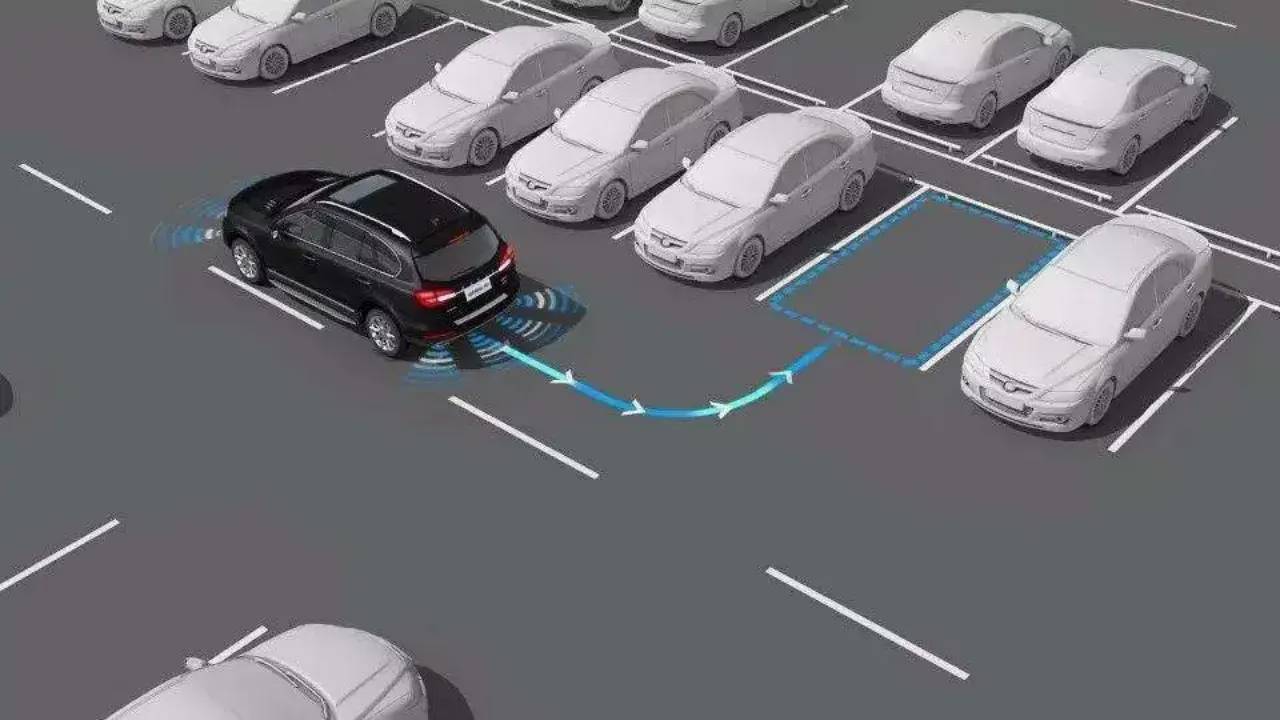
1. 自动泊车(APA)
定义:自己帮你停进车位(比如侧方、垂直车位),但需要你坐在车里监控。
怎么用:开到车位附近,按下按钮,车自己打方向盘、倒车入库。
场景:商场标准车位、狭窄车位(新手友好)
代表车型:比亚迪汉、丰田凯美瑞
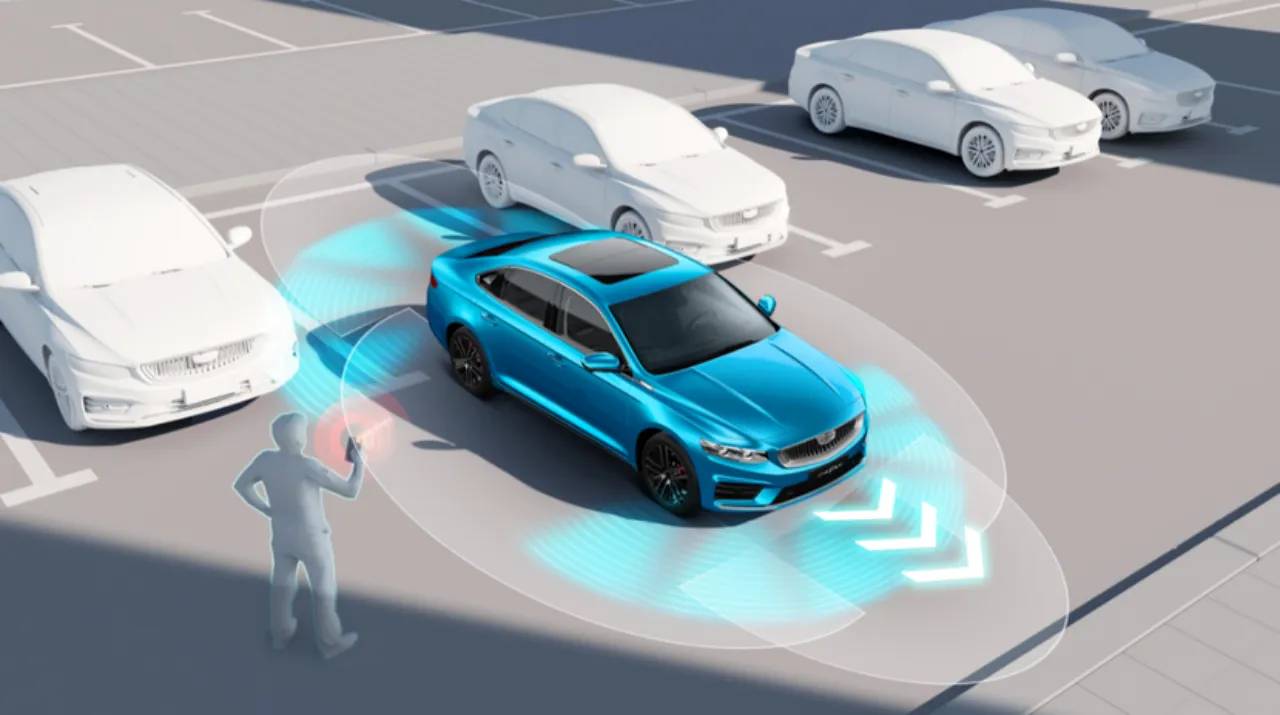
2. 遥控泊车(RPA)
定义:用手机或钥匙遥控车辆前进/后退,人在车外操作。
怎么用:车停太挤开不了门?掏出手机按住方向键,车自己挪出来。
场景:车位太窄下不了车、雨天不想淋湿。
代表车型:特斯拉Model 3(召唤模式)、宝马X5、吉利。
3. 记忆泊车(HPA)
定义:车记住你常走的停车路线(比如从家门口到地下车库),下次自动复现。
用法:第一次手动开到车位,车记录路线;之后开到起点,车自己按路线开到车位。
场景:固定路线停车(比如回家进地库)。
代表车型:小鹏G9(记忆路线最长1公里)、理想L9。

4. 代客泊车(VPA/VPD)
定义:车自己从停车场入口开到车位停好,还能远程召唤回来接你。
用法:到停车场门口直接下车走人,车自己找车位;回来时点手机,车开到出口等你。
场景:机场/商场停车场、不想走路找车位。
代表车型:问界M5(华为ADS 2.0)、奔驰EQS。

5, 区别

6,技术差异
6.1. 自动泊车
传感器:超声波雷达(倒车雷达)+ 摄像头。
原理:通过雷达探测障碍物距离,计算倒车轨迹(类似驾校教练教的“看后视镜倒车”)。
6.2 遥控泊车
传感器:超声波雷达 + 车载通信模块(蓝牙/4G)。
原理:手机发送指令,车按固定路径低速移动(速度一般<2km/h)。
6.3 记忆泊车
传感器:摄像头 + GPS + 惯性导航(IMU)。
原理:记录方向盘转角、车速、周围图像,复现路线(类似“自动驾驶录播”)。
6.4代客泊车
传感器:激光雷达 + 高精摄像头 + 停车场地图。
原理:车自己建图(SLAM技术)+ 动态避障,像扫地机器人一样规划路径。
7.优缺点



















 752
752

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











