






理解系统的输入u(t)【Mi、ɸi】、输出x(t)【M0、ɸ0】、传递函数G(s),三者的关系。一阶线性时不变系统
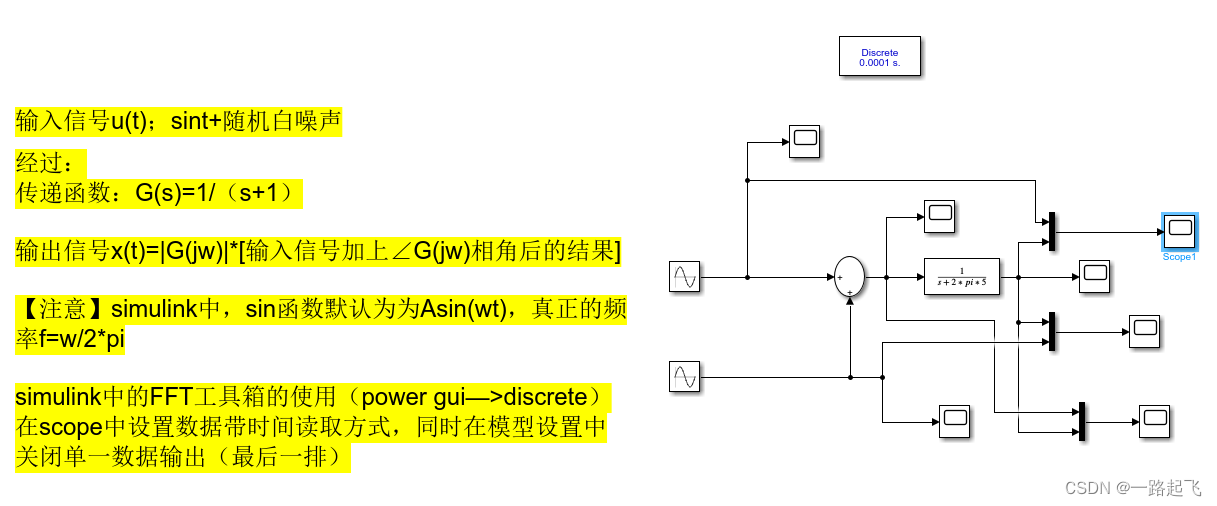
振幅响应;M0/Mi=|G(jw)| 【为传递函数G(jw)在复平面的模】
频率响应:ɸ0-ɸi=∠G(jw) 【为传递函数G(jw)在复平面的角度】
eg.若输入信号u(t)=Mi*sin(wt+ɸi),通过传递函数【G(s)为已知】的计算,可以得到输出信号
x(t)=M0*sin(wt+ɸ0)=Mi*|G(jw)|*sin(w*t+ɸi+∠G(jw))
理解系统的输入u(t)【Mi、ɸi】、输出x(t)【M0、ɸ0】、传递函数G(s),三者的关系。一阶线性时不变系统
振幅响应;M0/Mi=|G(jw)| 【为传递函数G(jw)在复平面的模】
频率响应:ɸ0-ɸi=∠G(jw) 【为传递函数G(jw)在复平面的角度】
eg.若输入信号u(t)=Mi*sin(wt+ɸi),通过传递函数【G(s)为已知】的计算,可以得到输出信号
x(t)=M0*sin(wt+ɸ0)=Mi*|G(jw)|*sin(w*t+ɸi+∠G(jw))
 1万+
5069
7250
1万+
5069
7250











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























