









 本文通过Simulink搭建了一个惯性环节的电路,并配置线性分析点进行仿真,对比理论计算的传递函数。通过单位阶跃响应和伯德图,验证了Simulink得到的传递函数与理论值一致,强调了Simulink在复杂电路分析和控制系统设计中的实用性。
本文通过Simulink搭建了一个惯性环节的电路,并配置线性分析点进行仿真,对比理论计算的传递函数。通过单位阶跃响应和伯德图,验证了Simulink得到的传递函数与理论值一致,强调了Simulink在复杂电路分析和控制系统设计中的实用性。
目录
对于比较复杂的电路,由于寄生参数等一系列因素,导致计算传递函数困难,对于控制系统来说Simulink可以通过扫伯德图得到传递函数,对于电路来说Simulink也可以干同样的事,这里通过一个惯性环节的电路通过理论推导的传递函数和通过simulink得到的传递函数进行比较,两者传递函数一致,由此方法,可以方便以后的开发设计。
惯性环节
惯性环节的输出一开始并不与输入同步按比例变化,直到过渡过程结束,y(t)才能与x(t)保持比例。这就是惯性的反映。惯性环节的时间常数就是惯性大小的量度。凡是具有惯性环节特性的实际系统,都具有一个存储元件或称容量元件,进行物质或能量的存储,如电容、热容等。由于系统的阻力,流入或流出存储元件的物质或能量不可能为无穷大,存储量的变化必须经过一段时间才能完成,这就是惯性存在的原因。
电路图和传递函数



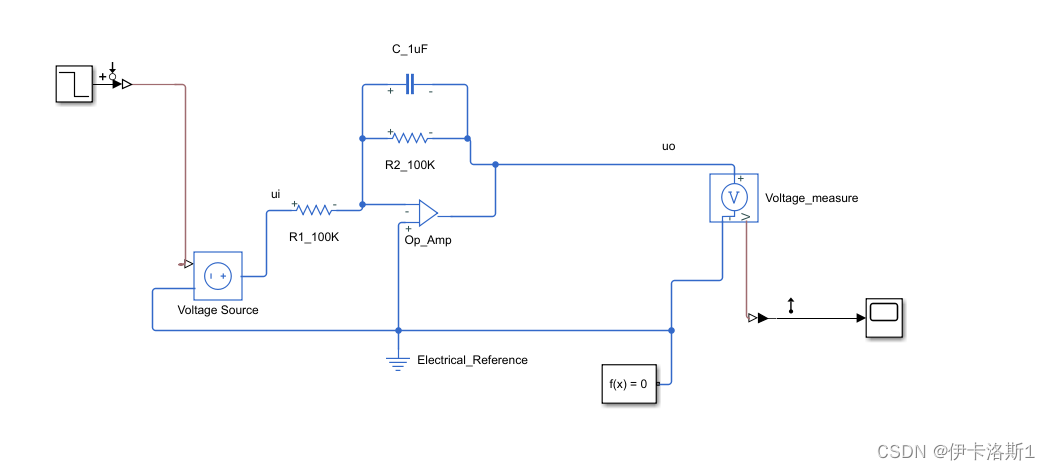
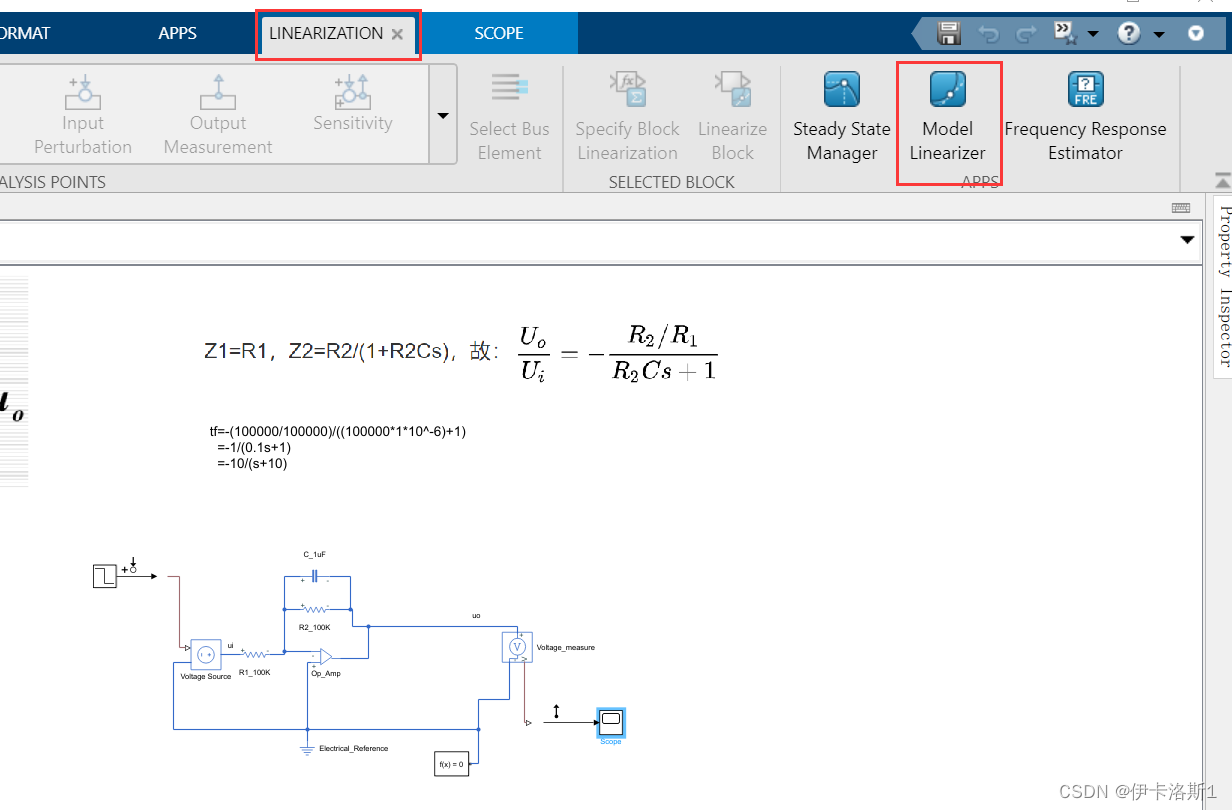
Simulink 搭建电路
如下,电路及参数已经标出
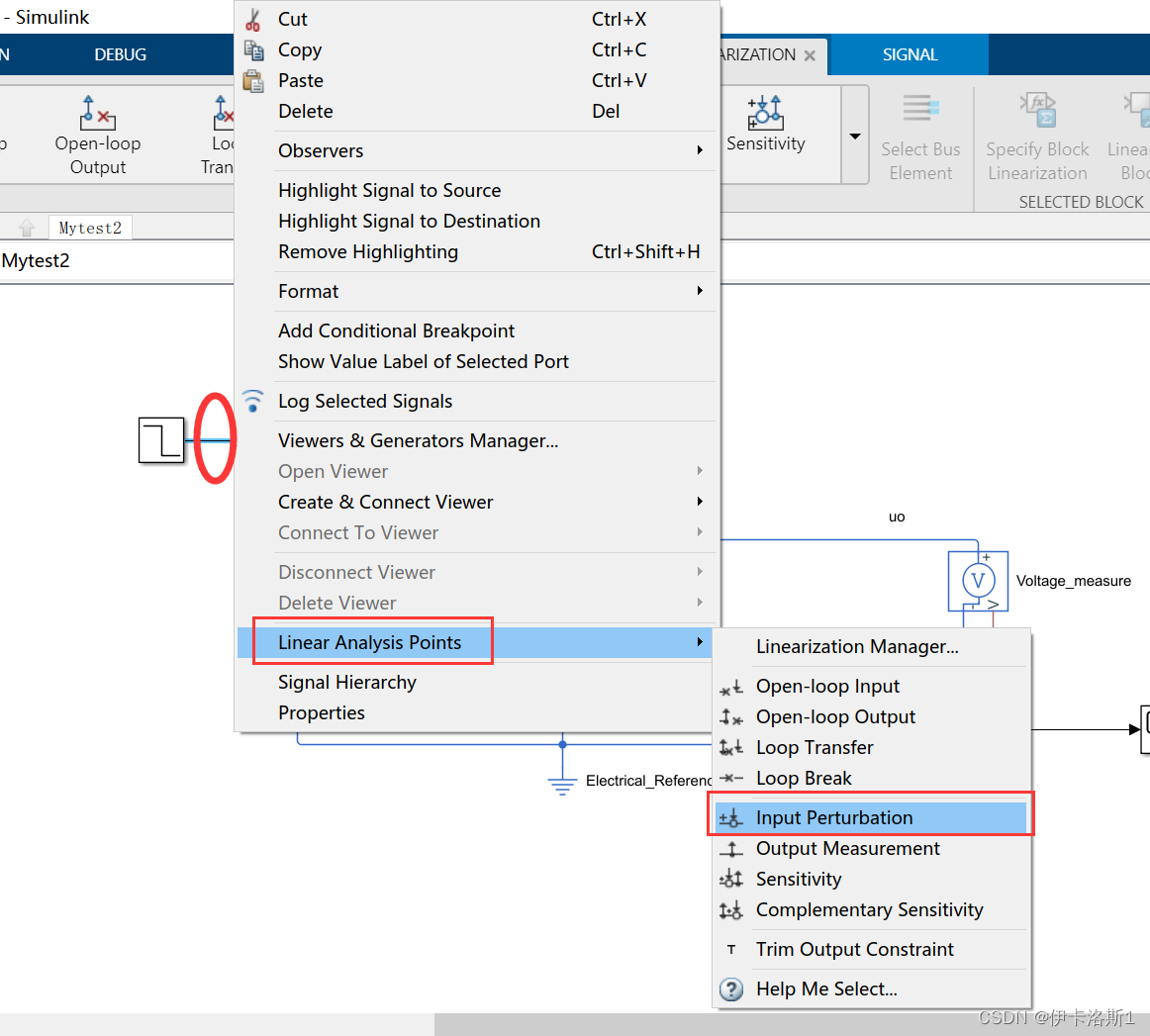
1.配置Liner analysis point
选中信号线设置输入点
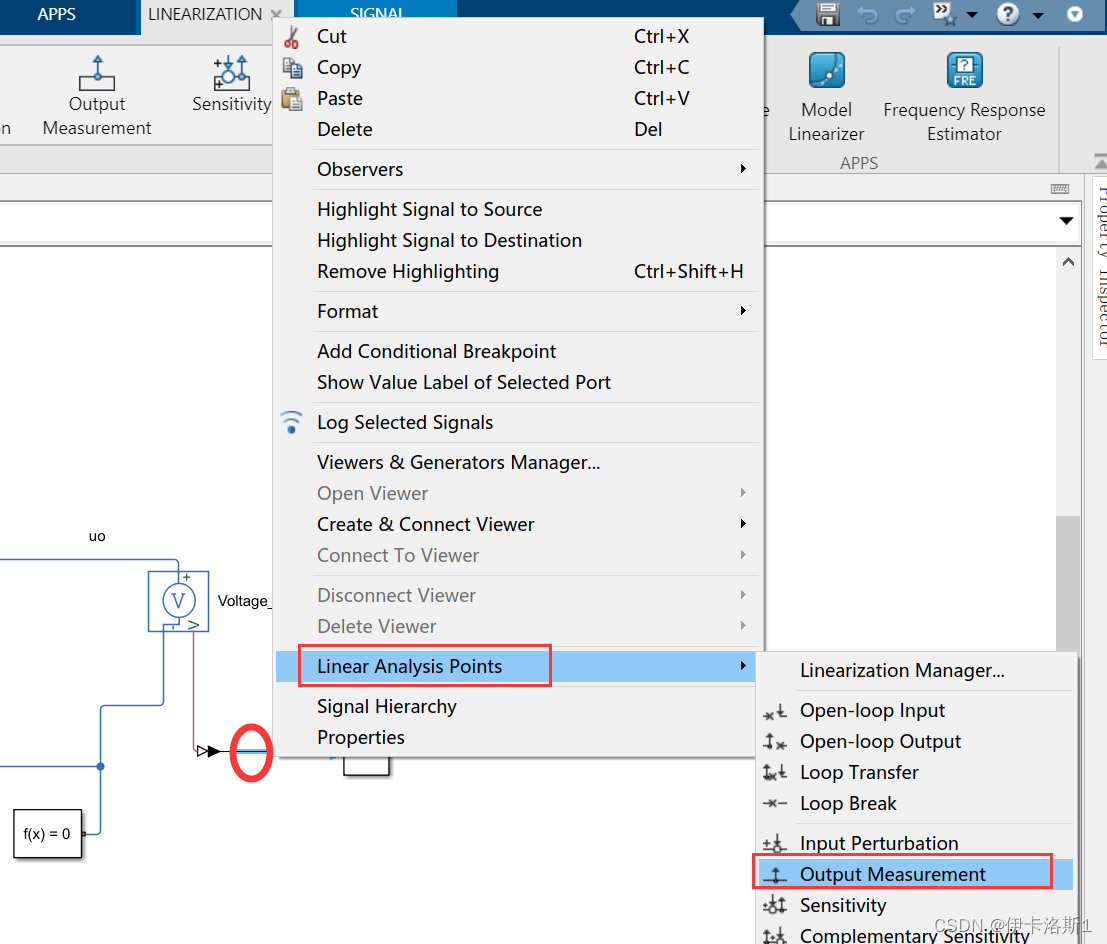
选中信号线设置输出点
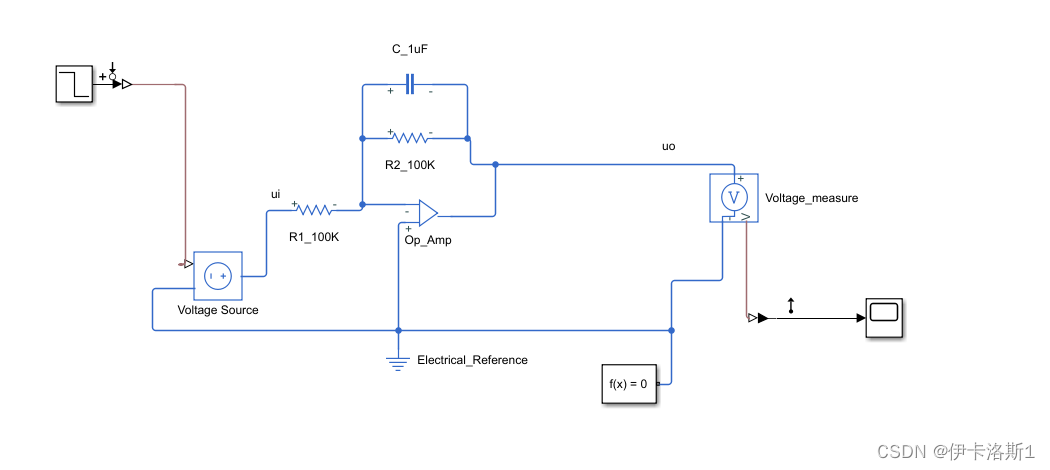
配置好后如下:
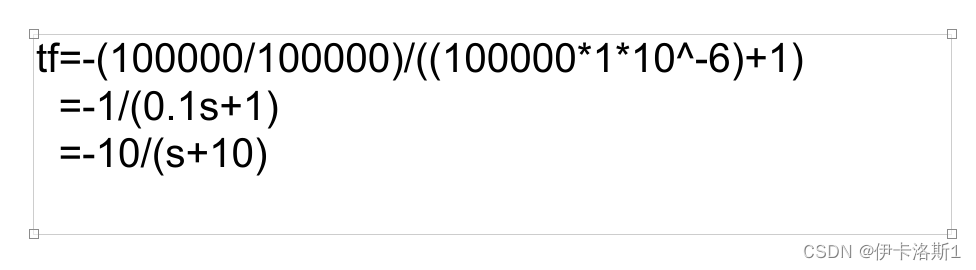
根据电路图,手动计算得到的传递函数如下:
2.仿真效果及传递函数生成
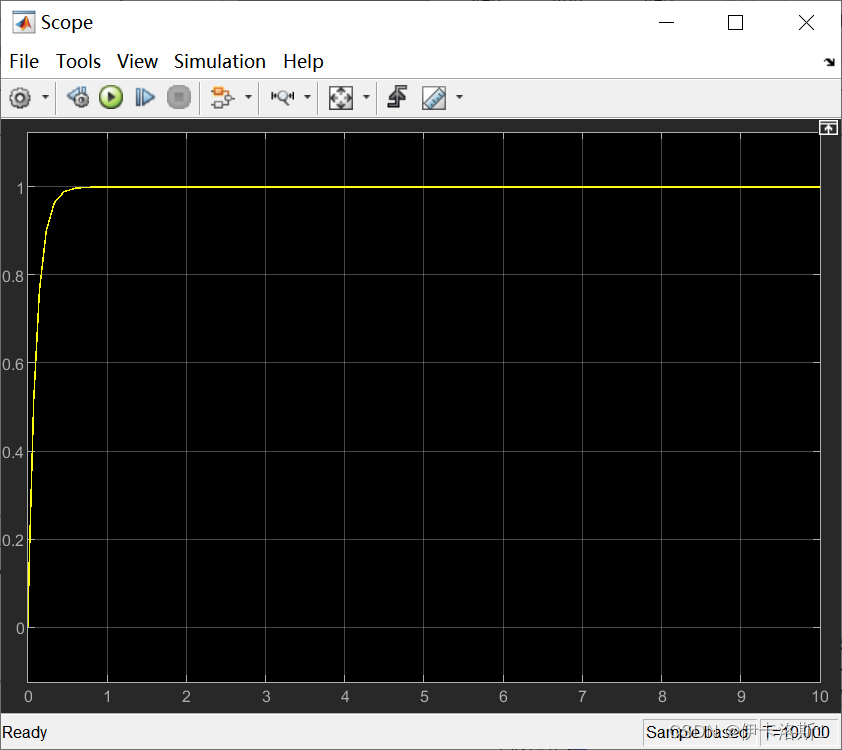
仿真响应
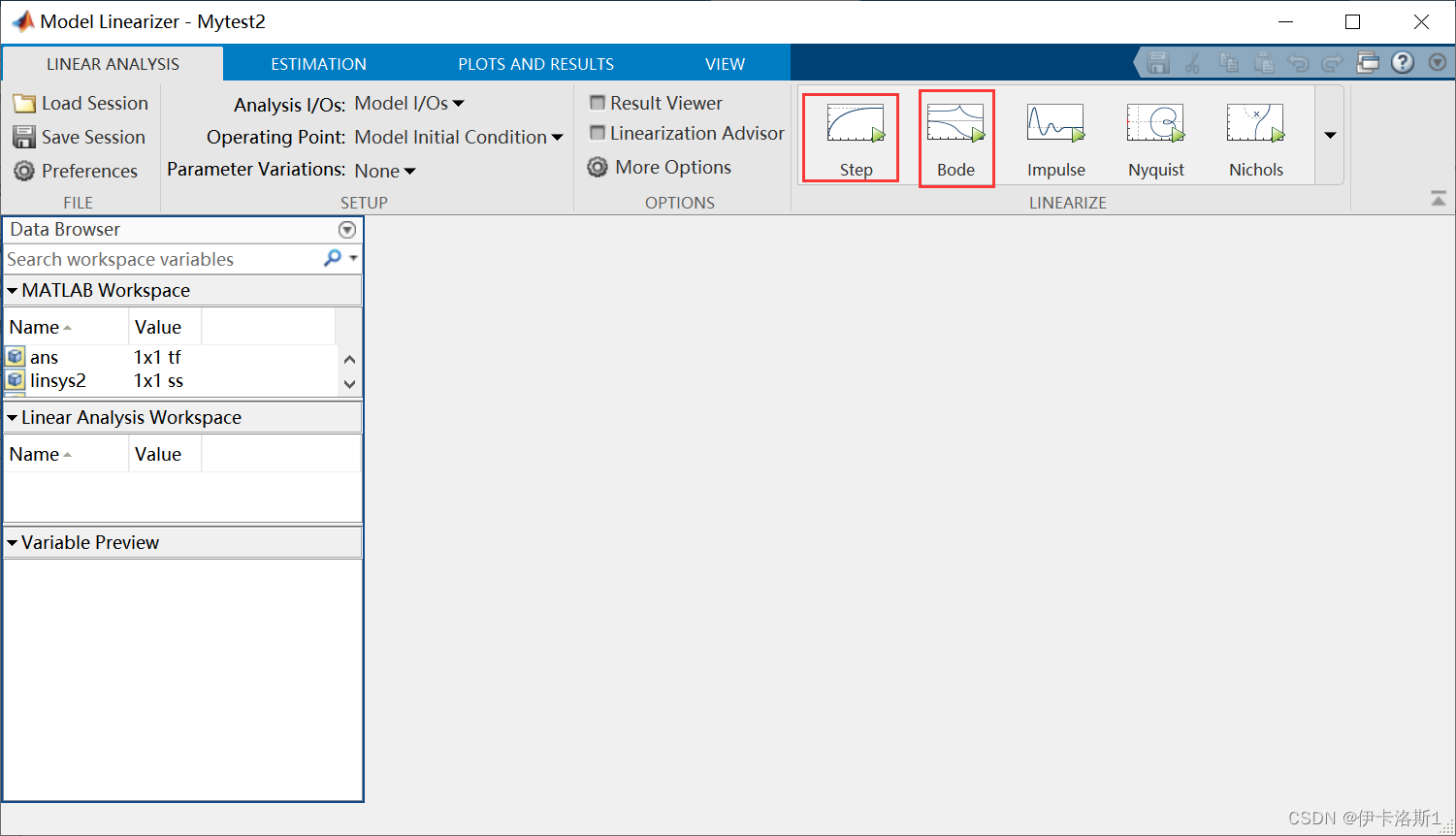
生成传递函数
step1:
step2:
点单位阶跃响应和伯德图
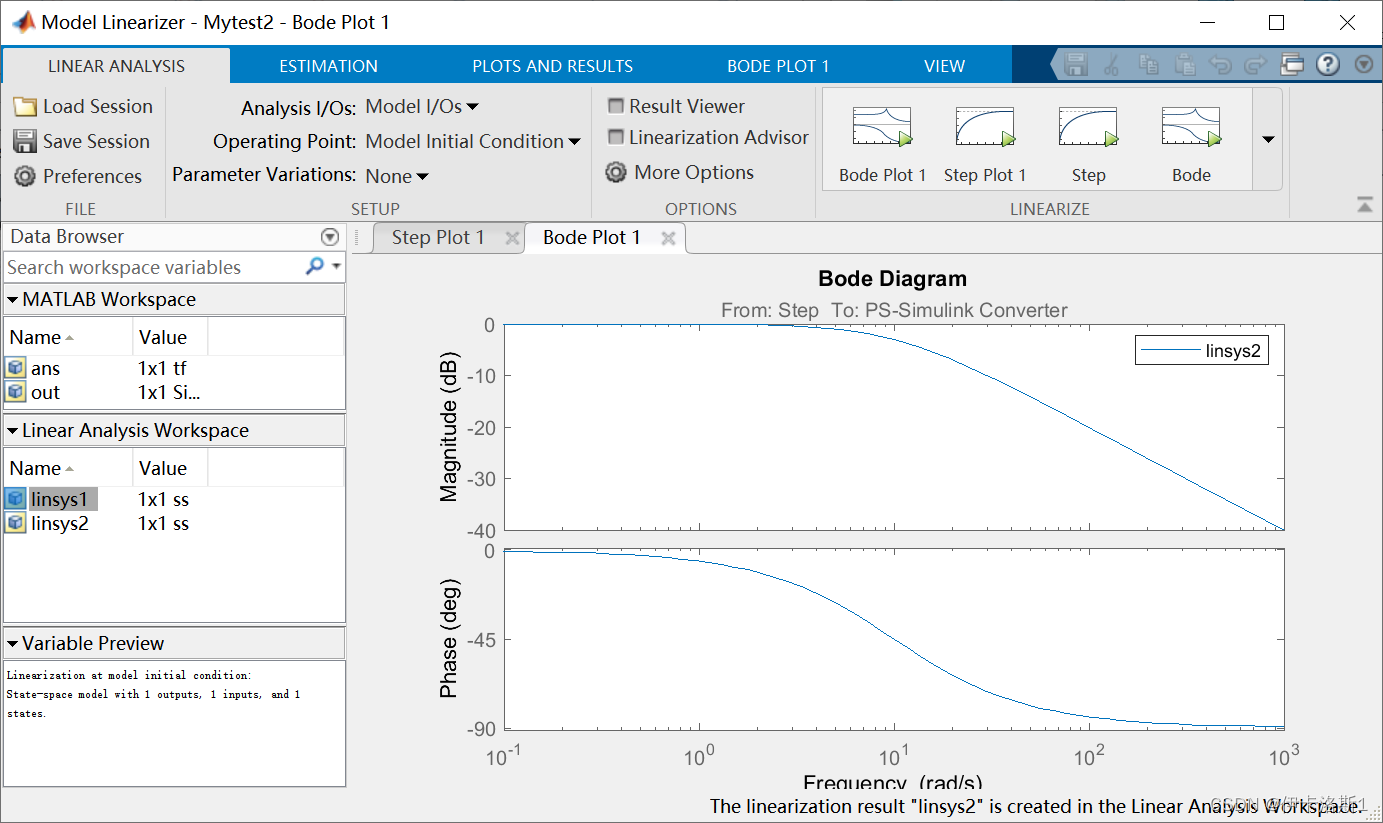
从伯德图和单位阶跃响应来看,搭建的电路和仿真效果一样
生成传递函数
把生成的Linsys拉到workspase
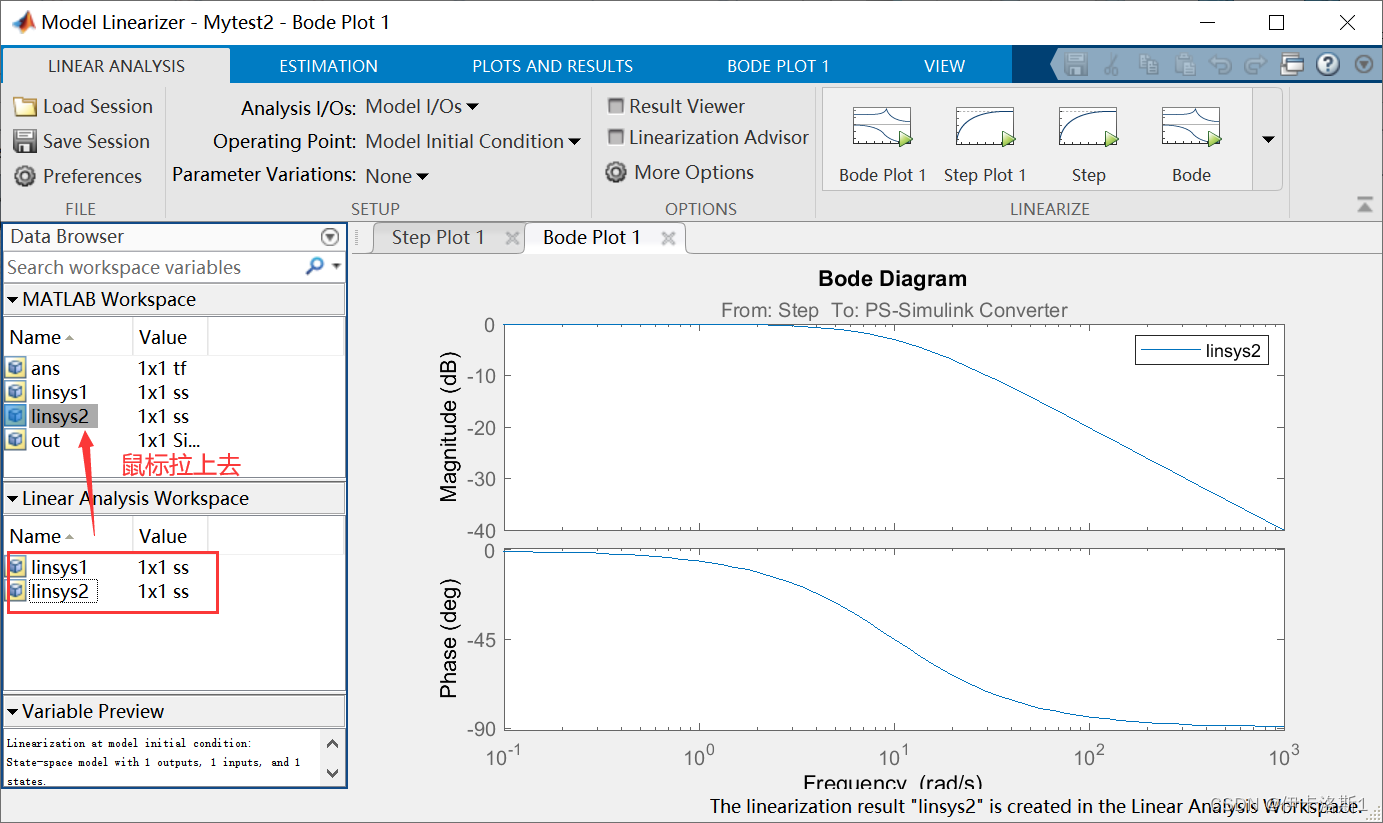
运行指令如下:

总结
通过这种方法可以辅助硬件的设计,硬件参数的验证等,在控制上也可以模拟负载等特性得到传递函数,再通过Simulink设计补偿器完成系统的环路设计等任务。是一个工程开发中比较方便的功能
模型放这里供参考:



















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











