






前言
最近公司因为项目方案的原因,选择了apm固件,当然硬件还是我熟悉的pix2.4.8,不过是改良版的。之前从来没有用过apm,用的都是px4,地面站也是qgc,不过在接触了一段时间后,意外的发现mission planner还挺好用,不过我发现apm的一些额外功能通过地面站参数设置来实现确实很方便,怪不得在航模圈受众很广,不过如果要用到上位机来跑一些算法,底层飞控的固件还是用px4更简便一些。
地面站
接触过pix飞控,一般都有一个默认的组合,px4固件+qgc地面站和apm固件+mission planner地面站,因为这两款固件当初分别是两个团队在开发,所以在开发上也有一些地面站的选择问题。地面站的下载安装就不介绍了,非常简单,去官网下载可执行文件后,一路点next安装就行。
固件烧录
下好地面站后,固件的烧录是第一步,后面的操作都是基于你所选择的固件开始的。飞控通过USB线接到电脑上,首次安装会提自动联机安装驱动软件,例如APM时会是这样:
安装成功功后,打开设备管理器(APM时)如下
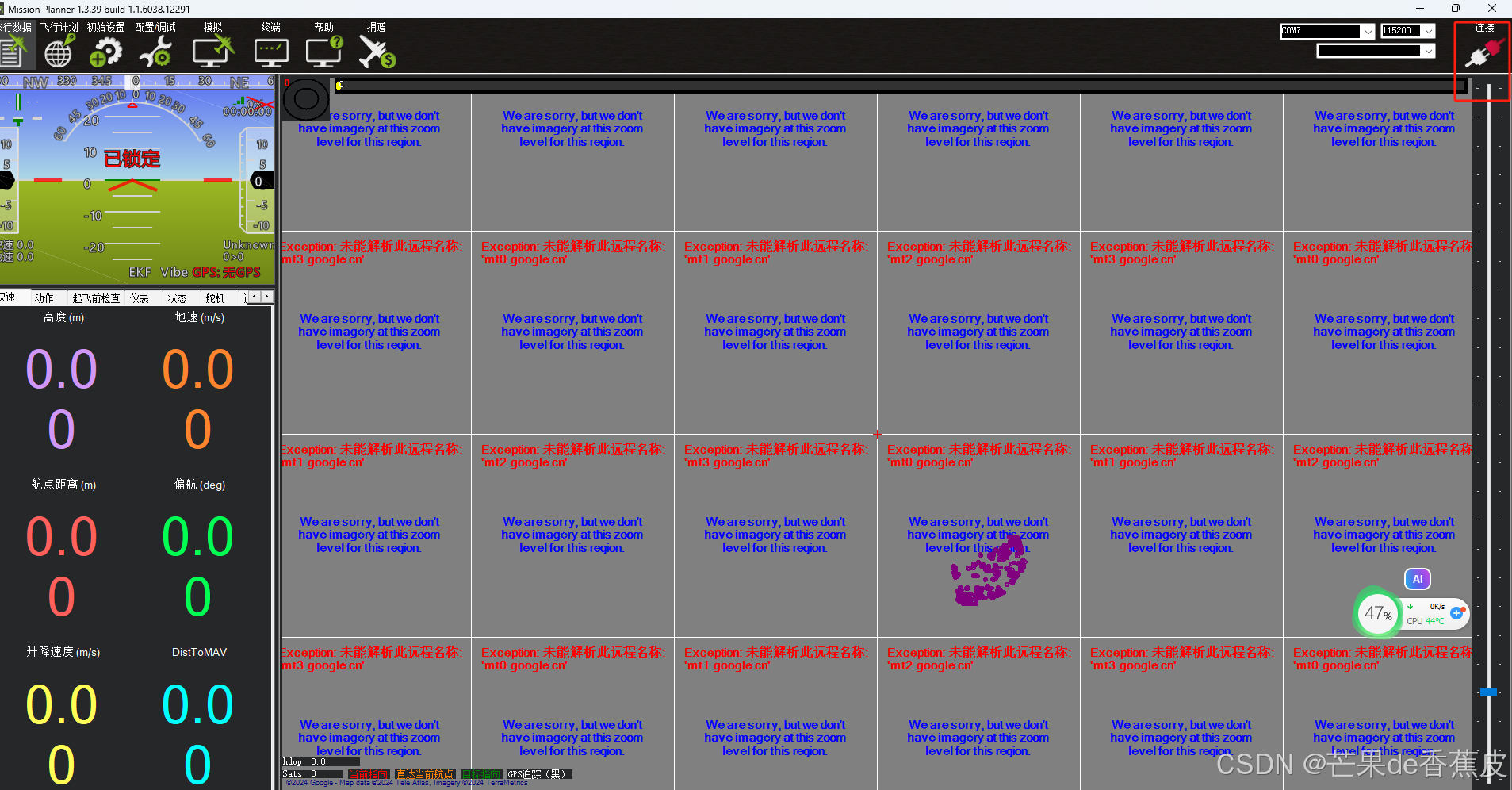
驱动安装完成后,打开地面站,会进入到下面这个页面 ,这里就和QGC不一样, 一般QGC我们接上飞控后会自动连接上,但是mission planner需要手动点击右上角的连接。但是刷固件的时候不要连!不要连!不要连!
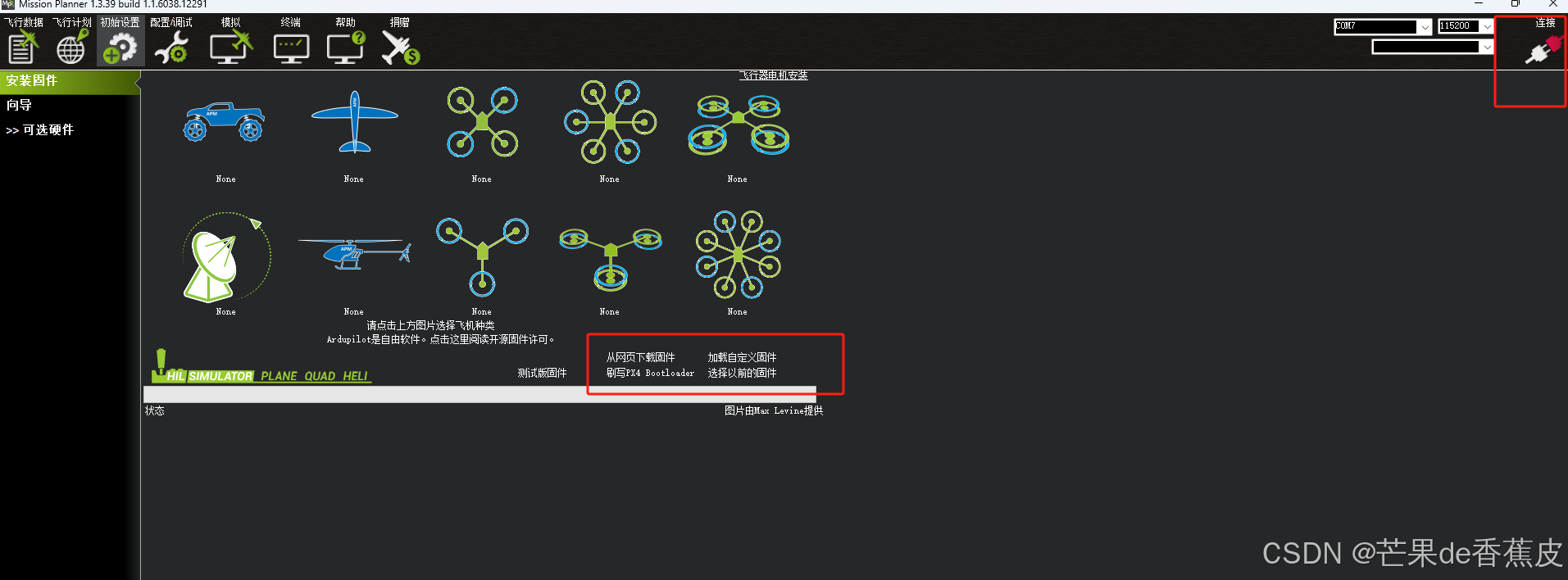
右上角要保持断状态,点击初始设置,安装固件,选择好机架类型后可以直接烧录固件,也可以选择烧录网上已经下载好的固件。烧录过程中,飞控的数据线一定不要拔,地面站提示安装成功后,也不要急着拔,等个几分钟。
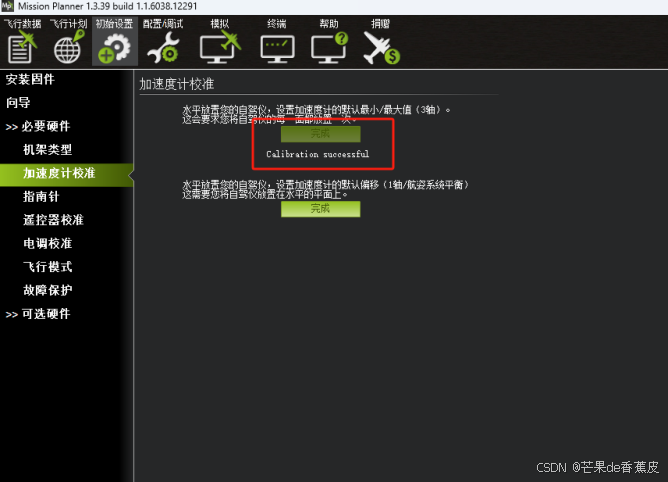
加速度计校准
点击右上角的连接按键,再点击初始设置,有一个加速度计校准,根据提示放置飞控,这一步可以等无人机组装完成后进行,步骤也简单,将机头对准正北方向(可以用手机来找北方向,机头对准即可),然后依次正方,左倾,右倾,机头朝下,机头朝上,机身倒放进行校准。
遥控器校准
将接收机插到飞控上,对频成功后,点击遥控器校准,推动左手油门摇杆,观察地面站是否有变化,然后点击校准,会出线一些红线,依次把摇杆推到最低,再推到最高,然后其他的遥控器通道也测试一下,所有的测试完成后,点击完成。

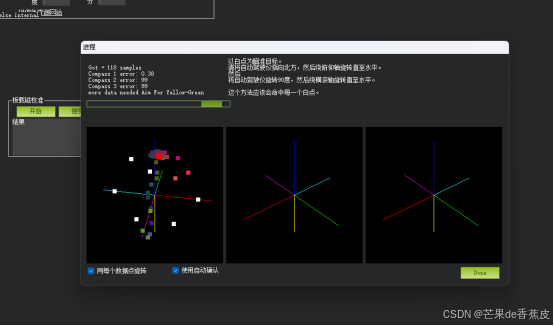
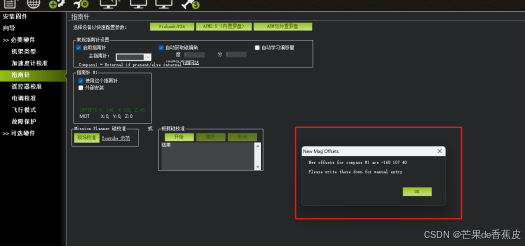
磁罗盘校准
这一步也不麻烦,建议整机组装好以后,将无人机朝着一个方向旋转,白色方块都消失了,校准就完成了,消失不了可以换一个方向试试。
飞行模式设置
这一步就还是常用的自稳、悬停、降落模式,我一般也就这三个,用遥控器的五通道来控制。根据习惯自行选择。

参数设置
老实说,这一步,我之前用QGC都没怎么弄,一般来说,选好合适的机架后,pix刷的固件算是比较稳定的了,加上GPS悬停应该是没有什么问题(比较也是几百块钱的飞控呢)。但是mission planner地面站还是提供了许多pid的参数设置的,这次在航模大佬的帮助下也是设置了一下,根据需求来吧,基本参数也够用了,修改完参数后要点击写入参数,才会在飞控中设置成功。
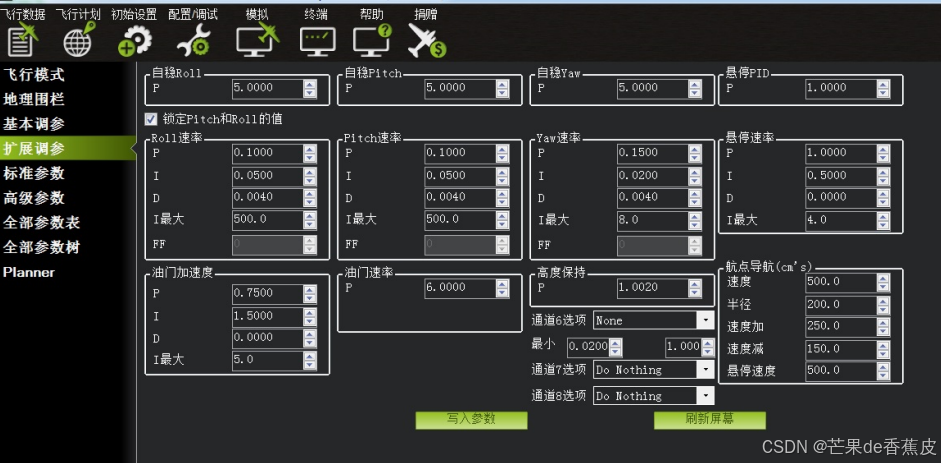
还有一些其他参数(全部参数表)的作用我就不一一介绍,根据自己实际项目的需要来调整,参数实在是太多了。加舵机,加云台,设置点击怠速,pwm输出口等等,百度搜索,大部分需要都能满足。

















 688
688

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









