






一般是在solidworks 画好图纸导出urdf 再导入到matlab中。但是,我不会用solidworks 。。。。
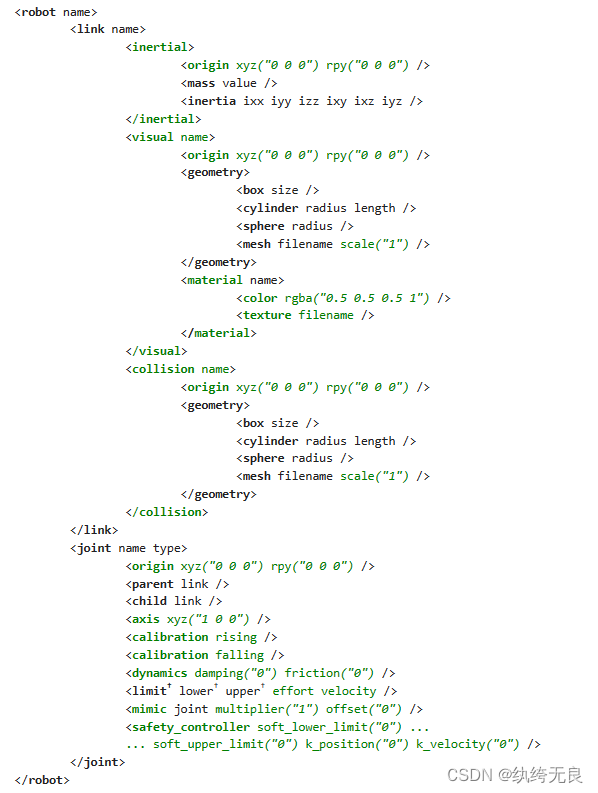
只能手搓urdf ,从官网看到的urdf文件基本内容,绿色的是可选项。
-
第一个link默认是base,与世界坐标系相连,其上表面是地面
-
每个link的frame 位于连杆中心,其大小和方向相对于上一个link的末端而言的
-
每个joint的位置相对于上一个joint而言的,方向按照世界坐标系方向
(感觉好奇怪啊。。。。但是建出来的效果确实符合上边的规则)
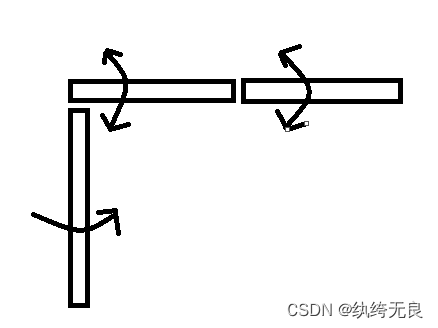
下面是一个三关节模型urdf例子
<robot name = "dof3">
<!-- links section -->>
<link name = "base">
<inertial>
<origin xyz = "0 0 0" />
<mass value = "0.5" />
<inertia ixx = "0.5" iyy = "0.5" izz = "0.5"
ixy = "0" ixz = "0" iyz = "0" />
</inertial>
<visual>
<origin xyz = "0 0 0" />
<geometry>
<box size = "0.5 0.5 0.05" />
</geometry>
<material name = "gray A">
<color rgba = "0.1 0.1 0.1 1" />
</material>
</visual>
</link>
<link name = "link 1">
<inertial>
<origin xyz = "0 0 0.1" rpy= "0 0 0"/>
<mass value = "0.5" />
<inertia ixx = "0.5" iyy = "0.5" izz = "0.5"
ixy = "0" ixz = "0" iyz = "0" />
</inertial>
<visual>
<origin xyz = "0 0 0.1" rpy="0 0 0"/>
<geometry>
<cylinder radius = "0.04" length = "0.2" />
</geometry>
<material name = "gray B">
<color rgba = "0.3 0.3 0.3 1" />
</material>
</visual>
</link>
<link name = "link 2">
<inertial>
<origin xyz = "0 0.1 0" rpy = "1.57 0 0 "/>
<mass value = "0.5" />
<inertia ixx = "0.5" iyy = "0.5" izz = "0.5"
ixy = "0" ixz = "0" iyz = "0" />
</inertial>
<visual>
<origin xyz = "0 0.1 0" rpy = "1.57 0 0" />
<geometry>
<cylinder radius = "0.04" length = "0.2" />
</geometry>
<material name = "gray C">
<color rgba = "0.5 0.5 0.5 1" />
</material>
</visual>
</link>
<link name = "link 3">
<inertial>
<origin xyz = "0 0.1 0" rpy = "1.57 0 0 "/>
<mass value = "0.5" />
<inertia ixx = "0.5" iyy = "0.5" izz = "0.5"
ixy = "0" ixz = "0" iyz = "0" />
</inertial>
<visual>
<origin xyz = "0 0.1 0" rpy = "1.57 0 0" />
<geometry>
<cylinder radius = "0.04" length = "0.2" />
</geometry>
<material name = "gray C">
<color rgba = "0.5 0.5 0.5 1" />
</material>
</visual>
</link>
<!-- joints section -->>
<joint name = "joint A" type = "continuous">
<parent link = "base" />
<child link = "link 1" />
<origin xyz = "0 0 0" />
<axis xyz = "0 0 1" />
</joint>
<joint name = "joint B" type = "continuous">
<parent link = "link 1" />
<child link = "link 2" />
<origin xyz = "0 0 0.2" />
<axis xyz = "1 0 0" />
<dynamics damping ="0.002" />
</joint>
<joint name = "joint C" type = "continuous">
<parent link = "link 2" />
<child link = "link 3" />
<origin xyz = "0 0.2 0" />
<axis xyz = "1 0 0" />
<dynamics damping ="0.002" />
</joint>
</robot>
效果:
导入:
robot= importrobot('dof3.urdf');
robot.Gravity = [0,0,-9.81];
robot.DataFormat = 'column';
q=[0,0,pi/2]'
show(robot,q)
注:需要最后接一个小小的虚杆,求运动学的时候需要用到
p_tform = getTransform(robot,q0,'linkEnd')
%linkEnd 是最后虚杆的fram, 意思是 虚杆frame相对世界坐标系的转换矩阵















 1630
1630











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









