







平面连杆机构
所有运动副均为转动副的平面四杆机构称为铰链四杆机构
与机架相连的为连架杆,连接连架杆的杆为连杆
若组成转动副的两构件做整周相对运动,则称改转动副为整转副,否则称为摆转副
铰链四杆机构分三种基本形式:
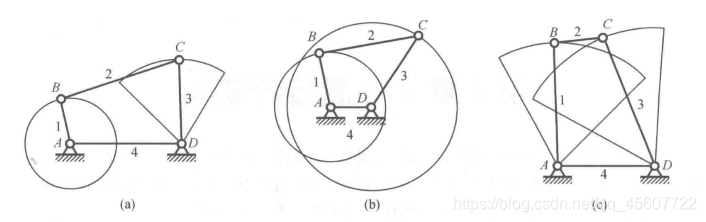
- 曲柄摇杆机构(如图a)
- 双曲柄机构(如图b)
- 双摇杆机构(如图c)
平面四杆机构有曲柄的条件
1 连架杆和机架,其中之一为最短
2 最短构件与最长构件的长度之和小于或等于其余两构件长度之和
平面四杆机构有整转副的条件
1 偏置为0时,连杆长度大于等于曲柄且导路足够长
2 偏置不为0时,连杆长度大于等于曲柄长度加上偏距且导路足够长。
推论
某平面四杆机构,当满足L(最短与最长杆之和) < L(其余两杆之和) 时,该机构的情况
- 最短杆是连架杆,该机构是曲柄摇杆机构
- 最短杆是机架,该机构是双曲柄机构
- 最短杆是连杆,该机构是双摇杆机构。
当L(最短与最长杆之和) > L(其余两杆之和) 时,该机构是双摇杆机构,同时机构没有整转副。
急回特性
极位夹角:对应从动杆的两个极限位置,主动件两个相应位置 其一的反向延长线与另一极限位置所夹锐角θ。
θ不等于0时,有急回特性。
行程速比系数K,K= V回/V工=(180°+θ)/(180°-θ)
压力角α
压力角α从动杆受力点的力作用线与该点速度方向线所夹的锐角
传动角γ是压力角的余角
死点是连杆与从动件共线的位置(α=90°,γ=0),
本文只是个简略的复习笔记,仅供参考

















 3228
3228

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









