







一、短时傅里叶变换的缺陷
窄窗口时间分辨率高、频率分辨率低;宽窗口时间分辨率低、频率分辨率高。
对于时变的非平稳信号,高频适合小窗口,低频适合大窗口。然而STFT的窗口是固定的,在一次STFT中宽度不会变化,所以STFT还是无法满足非稳态信号变化的频率的需求。
二、小波变换的优点
小波的优点,其实就是上面傅立叶缺点的解决:
对于加窗傅立叶变换让人头疼的就是窗口的大小问题,如果我们让窗口的大小可以改变,不就完美了吗?答案是肯定的,小波就是基于这个思路。但是不同的是,STFT是给信号加窗,分段做FFT;而小波变换并没有采用窗的思想,更没有做傅里叶变换。小波直接把傅里叶变换的基给换了—将无限长的三角函数基换成了有限长的会衰减的小波基。这样不仅能够获取频率,还可以定位到时间了。
这个基函数会伸缩、会平移(其实是两个正交基的分解)。缩得窄,对应高频;伸得宽,对应低频。然后这个基函数不断和信号做相乘。某一个尺度(宽窄)下乘出来的结果,就可以理解成信号所包含的当前尺度对应频率成分有多少。于是,基函数会在某些尺度下,与信号相乘得到一个很大的值,因为此时二者有一种重合关系。那么我们就知道信号包含该频率的成分的多少。如前边所说,小波做的改变就在于,将无限长的三角函数基换成了有限长的会衰减的小波基。
三、小波变换和傅里叶变换的比较
- 傅里叶变换的实质是把能量有限的信号 f ( t ) f(t) f(t)分解到以 e j ω t {e^{j\omega t}} ejωt为正交基的空间上去;小波变换的实质是把能量有限的信号 f ( t ) f(t) f(t)分解到以 W − j ( j = 1 , 2 , ⋯ , J ) W_{-j}(j=1,2,\cdots,J) W−j(j=1,2,⋯,J)和 V − j V_{-j} V−j所构成的空间上去。
- 傅里叶变换用到的基本函数只有 s i n ( ω t ) , c o s ( ω t ) , e j ω t sin(\omega t),cos(\omega t),e^{j\omega t} sin(ωt),cos(ωt),ejωt,具有唯一性;小波分析所用到的小波函数则不是唯一的,同一个工程问题用不同的小波函数进行分析有时结果相差甚远。小波函数的选用是小波分析应用到实际中的一个难点问题,也是分析研究的一个热点问题,目前往往是通过经验和不断的试验,将不同的分析结果进行对照分析来选择小波函数。
- 在频域中,傅里叶变换具有较好的局部化能力,特别是对于那些频率成分比较简单的确定性信号,傅里叶变换很容易把信号表示成各频率成分的叠加和的形式,但在时域中,傅里叶变换没有局部化能力,无法从信号 f ( t ) f(t) f(t)的傅里叶变换 F ( ω ) F(\omega) F(ω)中看出 f ( t ) f(t) f(t)在任一时间点附近的特性。
- 在小波分析中,尺度 α \alpha α越大相当于傅里叶变换中的 ω \omega ω值越小。
- 在短时傅里叶变换中,变换系数 G f ( ω , τ ) G_f(\omega,\tau) Gf(ω,τ)主要依赖于信号在时间窗内的情况,一旦时间窗函数确定,则分辨率也就固定了。而在小波变换中,变换系数 W T x ( α , τ ) WT_x(\alpha,\tau) WTx(α,τ)虽然也是依赖于信号在时间窗内的情况,但时间尺度是随尺度 α \alpha α的变化而变化的,所以小波变换具有时间局部分析的能力。
- 若用信号通过滤波器来解释,小波变换与短时傅里叶变换不同之处在于:对短时傅里叶变换来说,带通滤波器的带宽
Δ
ω
\Delta \omega
Δω与中心频率
ω
\omega
ω无关;相反,小波变换带通滤波器的带宽
Δ
ω
\Delta \omega
Δω则正比于中心频率
ω
\omega
ω,即
Q = Δ ω ω = C C 为 常 数 Q=\frac{\Delta \omega}{\omega}=C \qquad C为常数 Q=ωΔω=CC为常数
也就是说,这组滤波器具有品质因数恒定,即相对带宽恒定的特点,称之为等 Q Q Q结构。
四、小波变换的基础知识(Wavelet Transform,WT)
小波变换具有多分辨特性,也叫多尺度特性,可以由粗到精地逐步观察信号,也可以看成是用一组带通滤波器对信号作滤波。通过适当地选择尺度因子和平移因子,可得到一个伸缩窗,只要适当选择小波基,就可以使小波变换在时域和频域都具有表征信号局部特征的能力,有利于检测信号的瞬态和奇异点。
1. 连续小波变换(Continuous Wavelet Transform,CWT)
1.1 定义
将任意 L 2 ( R ) L^2(R) L2(R)空间(表示为可测量的、模平方可积分的一维函数空间)中的函数 z ( t ) z(t) z(t)在小波基 φ ( t ) \varphi(t) φ(t)下进行展开,称作函数 z ( t ) z(t) z(t)的连续小波变换(CWT),其表达式为
W T z ( a , b ) = < z ( t ) , φ a , b ( t ) > = 1 a ∫ R z ( t ) φ ( t − b a ) d t WT_z(a,b)=<z(t),\varphi_{a,b}(t)>=\frac{1}{\sqrt{a}}\int_Rz(t)\varphi(\frac{t-b}{a})\,dt WTz(a,b)=<z(t),φa,b(t)>=a1∫Rz(t)φ(at−b)dt
式中, a > 0 a>0 a>0,称为尺度因子(在某种意义下就是频率的概念),其作用是对小波基函数作伸缩, b b b反映位移,其值可正可负, a a a和 b b b都是连续的变量。
在不同尺度下小波的持续时间随值的增大而增宽,幅度则与 a \sqrt{a} a反比减少,但波的形状保持不变。
由连续小波变换的定义可知,小波变换同傅里叶变换一样,都是一种积分变换,称 W T z ( a , b ) WT_z(a,b) WTz(a,b)为小波变换系数。由于小波基不同于傅里叶基,因此小波变换与傅里叶变换有很大的不同,其中最重要的是,小波基具有尺度 a a a和平移 b b b两个参数。
根据时频分析的要求,构造的小波基函数 φ ( t ) \varphi(t) φ(t)应该满足以下条件:
- 本身是紧支撑的,即只有小的局部非零定义域,在窗口之外函数为零;(具有有限的持续时间和突变的频率和振幅)
- 本身是振荡的,具有波的性质,并且完全不含直流趋势成分,(在有限时间范围内平均值为0)即
Ψ ( 0 ) = ∫ − ∞ ∞ φ ( t ) d t = 0 \Psi(0)=\int_{-∞}^{∞}\varphi(t)\,dt=0 Ψ(0)=∫−∞∞φ(t)dt=0
式中 Ψ ( f ) \Psi(f) Ψ(f)是函数 φ ( t ) \varphi(t) φ(t)的傅里叶变换。 - 包含尺度参数
a
(
a
>
0
)
a(a>0)
a(a>0)和平移参数
b
b
b
a a a增大,则时窗伸展,频宽收缩,带宽变窄,中心频率降低,而频率分辨率增高; a a a减小则带宽增加,中心频率升高,时间分辨率增高而频率分辨率降低。这恰恰符合实际问题中高频信号持续时间短、低频信号持续时间长的自然规律。因此,同固定时窗的短时傅里叶变换相比,小波变换在时频分析领域具有不可比拟的优点。
如果采用的小波满足下式,则其反变换存在
C φ = ∫ R ∣ Ψ ( ω ) ∣ 2 ∣ ω ∣ d ω < ∞ C_\varphi=\int_R\frac{|\Psi(\omega)|^2}{|\omega|}\,d\omega<∞ Cφ=∫R∣ω∣∣Ψ(ω)∣2dω<∞
且连续小波变换的反变换表达式为
x ( t ) = 1 ∫ 0 ∞ ∣ Ψ ( a ω ) ∣ a d ω ∫ 0 ∞ d a a 2 ∫ − ∞ ∞ W T z ( a , b ) 1 a φ ( t − b a ) d b x(t)=\frac{1}{\int_{0}^{∞}\frac{|\Psi(a\omega)|}{a}\,d\omega}\int_{0}^{∞}\frac{da}{a^2}\int_{-∞}^{∞}WT_z(a,b)\frac{1}{\sqrt{a}}\varphi(\frac{t-b}{a})\,db x(t)=∫0∞a∣Ψ(aω)∣dω1∫0∞a2da∫−∞∞WTz(a,b)a1φ(at−b)db
1.2 基本性质
连续小波变换是一种线性变换,具有以下性质:
性质1:叠加性
假设 x ( t ) , y ( t ) ∈ L 2 ( R ) x(t),y(t)∈L^2(R) x(t),y(t)∈L2(R)空间, λ 1 , λ 2 \lambda_1,\lambda_2 λ1,λ2为任意常数,记 x ( t ) x(t) x(t)的连续小波变换为 W T x ( a , b ) WT_x(a,b) WTx(a,b), y ( t ) y(t) y(t)的连续小波变换为 W T y ( a , b ) WT_y(a,b) WTy(a,b),则 z ( t ) = λ 1 x ( t ) + λ 2 y ( t ) z(t)=\lambda_1x(t)+\lambda_2y(t) z(t)=λ1x(t)+λ2y(t)的连续小波变换为
W T z ( a , b ) = λ 1 W T x ( a , b ) + λ 2 W T y ( a , b ) WT_z(a,b)=\lambda_1WT_x(a,b)+\lambda_2WT_y(a,b) WTz(a,b)=λ1WTx(a,b)+λ2WTy(a,b)
性质2:时移不变性
记 x ( t ) x(t) x(t)的连续小波变换为 W T x ( a , b ) WT_x(a,b) WTx(a,b),则 x ′ ( t ) = x ( t − t 0 ) x'(t)=x(t-t_0) x′(t)=x(t−t0)的连续小波变换为
W T x ′ ( a , b ) = W T x ( a , b − t 0 ) WT_{x'}(a,b)=WT_x(a,b-t_0) WTx′(a,b)=WTx(a,b−t0)
表明:延时后的信号的小波系数可将原信号的小波系数在b轴上进行相应时移即可。
性质3:尺度变换
记 x ( t ) x(t) x(t)的连续小波变换为 W T x ( a , b ) WT_x(a,b) WTx(a,b),则 x ′ ( t ) = x ( t ρ ) x'(t)=x(\frac{t}{ρ}) x′(t)=x(ρt)( ρ > 0 ρ>0 ρ>0为常数)的连续小波变换为
W T x ′ ( a , b ) = ρ W T x ( a ρ , b ρ ) WT_{x'}(a,b)=\sqrt{ρ}WT_x(\frac{a}{ρ},\frac{b}{ρ}) WTx′(a,b)=ρWTx(ρa,ρb)
表明:当信号在时域作某一倍数伸缩时,其小波变换在a,b两轴上也作同一倍数伸缩,且形状不变。
性质4:内积定理
假设 x ( t ) , y ( t ) ∈ L 2 ( R ) x(t),y(t)∈L^2(R) x(t),y(t)∈L2(R)空间,记 x ( t ) x(t) x(t)的连续小波变换为 W T x ( a , b ) WT_x(a,b) WTx(a,b), y ( t ) y(t) y(t)的连续小波变换为 W T y ( a , b ) WT_y(a,b) WTy(a,b),则有
< W T x ( a , b ) , W T y ( a , b ) > = C φ < x ( t ) , y ( t ) > <WT_x(a,b),WT_y(a,b)>=C_\varphi<x(t),y(t)> <WTx(a,b),WTy(a,b)>=Cφ<x(t),y(t)>
式中 C φ C_\varphi Cφ是 φ ( t ) \varphi(t) φ(t)的Cohen类时频分布,< ⋅ \cdot ⋅>表示内积运算。
1.3 常用的连续小波基函数
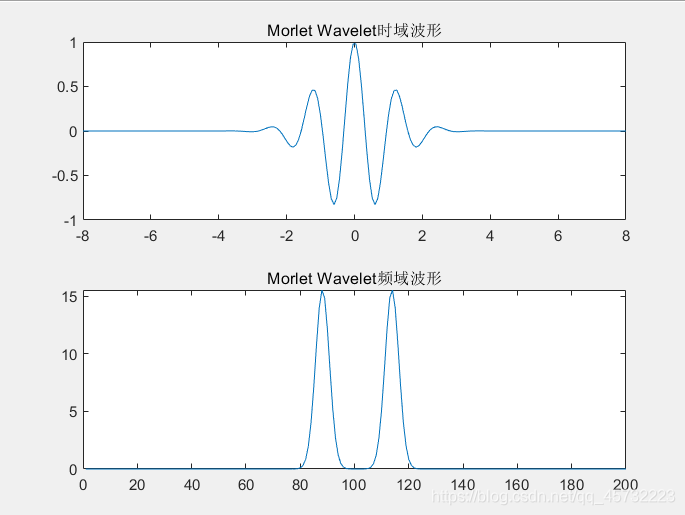
1.3.1 Morlet小波
时域表达式:
φ
(
t
)
=
e
−
t
2
/
2
e
j
w
0
t
,
w
0
≥
5
\varphi(t)=e^{-t^2/2}e^{jw_0t},w_0≥5
φ(t)=e−t2/2ejw0t,w0≥5
频域表达式:
Ψ
(
w
)
=
2
π
e
−
(
w
−
w
0
)
2
2
\Psi(w)=\sqrt{2\pi}e^{-\frac{(w-w_0)^2}{2}}
Ψ(w)=2πe−2(w−w0)2
Morlet小波是一种复数小波,其在时、频域都具有较好的局部性,常用于复数信号的分解及时频分析中。
%%********** Morlet 小波函数 *********%%
% 这里仅画出实部波形,且w0=5
lb = -8; ub = 8; n = 200;
[psi,xval] = morlet(lb,ub,n);
PSI=fftshift(abs(fft(psi)));
figure;
subplot(2,1,1); plot(xval,psi); title('Morlet Wavelet时域波形');
subplot(2,1,2); plot(PSI); title('Morlet Wavelet频域波形');
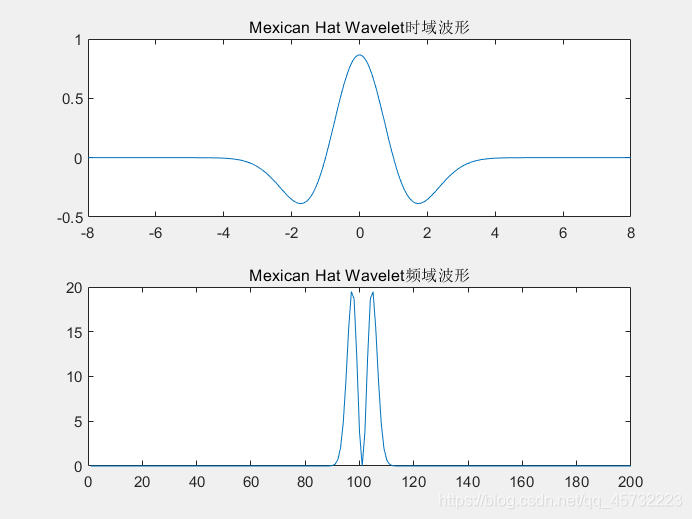
1.3.2 Mexican hat小波
时域表达式:
φ
(
t
)
=
(
1
−
t
2
)
e
−
t
2
/
2
\varphi(t)=(1-t^2)e^{-t^2/2}
φ(t)=(1−t2)e−t2/2
频域表达式:
Ψ
(
w
)
=
2
π
w
2
e
−
w
2
2
\Psi(w)=\sqrt{2\pi}w^2e^{-\frac{w^2}{2}}
Ψ(w)=2πw2e−2w2
Mexican hat小波实际上是高斯函数的二阶导数,在时、频域都具有较好的局部性。
%%********** Mexican hat 小波函数 *********%%
lb = -8; ub = 8; n = 200;
[psi,xval] = mexihat(lb,ub,n);
PSI=fftshift(abs(fft(psi)));
figure;
subplot(2,1,1); plot(xval,psi); title('Mexican Hat Wavelet时域波形');
subplot(2,1,2); plot(PSI); title('Mexican Hat Wavelet频域波形');
2. 离散小波变换(Discrete Wavelet Transform,DWT)
根据连续小波变换的定义可知,在连续变化的尺度 a a a和时间 b b b值下,小波基函数具有很大的相关性,因此信号的连续小波变换系数的信息量是冗余的。
减小小波变换系数冗余度的方法是将小波基函数
φ
a
,
b
(
t
)
\varphi_{a,b}(t)
φa,b(t)的
a
,
b
a,b
a,b限定在一些离散点上取值,常用的离散化方法是将尺度按幂级数进行离散化,即取
a
m
=
a
0
m
a_m=a_0^m
am=a0m(
m
m
m为整数,
a
0
≠
1
a_0≠1
a0=1,一般取
a
0
=
2
a_0=2
a0=2),对
b
b
b进行均匀离散取值,以覆盖整个时间轴(为了不丢失信息,要求满足采样定理),这样小波基函数变为
φ
m
,
n
(
t
)
=
2
−
m
/
2
φ
(
2
−
m
t
−
n
)
\varphi_{m,n}(t)=2^{-m/2}\varphi(2^{-m}t-n)
φm,n(t)=2−m/2φ(2−mt−n)
因此任意函数
z
(
t
)
z(t)
z(t)的离散小波变换为
W
T
z
(
m
,
n
)
=
<
z
(
t
)
,
φ
m
,
n
(
t
)
>
=
2
−
m
/
2
∫
R
z
(
t
)
φ
(
2
−
m
t
−
n
)
d
t
WT_z(m,n)=<z(t),\varphi_{m,n}(t)>=2^{-m/2}\int_Rz(t)\varphi(2^{-m}t-n)\,dt
WTz(m,n)=<z(t),φm,n(t)>=2−m/2∫Rz(t)φ(2−mt−n)dt
在离散小波中,还有一类特殊情况,即仅在尺度上进行了二进制离散,而位移仍连续变化,称之为二进小波(Dyadic Wavelet),其表达式为
φ
2
k
,
b
(
t
)
=
2
−
k
/
2
φ
(
t
−
b
2
k
)
\varphi_{2^k,b}(t)=2^{-k/2}\varphi(\frac{t-b}{2^k})
φ2k,b(t)=2−k/2φ(2kt−b)
离散小波变换不再具有伸缩和时移共变性质;二进小波介于连续小波和离散小波之间,仍具有连续小波变换的时移共变性质,正因为如此,它在奇异性检测、图像处理方面十分有用。
3. 正交小波变换
3.1 多尺度分析
从小波函数的条件来看,小波基不一定是正交基,但是在实际应用中希望找到正交小波基。构造正交小波基的重要方法称之为多尺度分析。
根据信号空间的概念,由尺度函数
ϕ
(
t
)
\phi(t)
ϕ(t)可以定义其对应的小波函数
ψ
(
t
)
\psi(t)
ψ(t),再由小波函数经过尺度伸缩与平移得到小波信号
ψ
m
,
n
(
t
)
\psi_{m,n}(t)
ψm,n(t),即
ϕ
(
t
)
⟹
ψ
(
t
)
⟹
ψ
m
,
n
(
t
)
ψ
m
,
n
(
t
)
=
2
m
/
2
ψ
(
2
m
t
−
n
)
m
,
n
∈
Z
\phi(t)\Longrightarrow \psi(t)\Longrightarrow \psi_{m,n}(t) \\ \qquad \\ {\color{blue} \psi_{m,n}(t)=2^{m/2}\psi(2^{m}t-n) \qquad m,n∈Z}
ϕ(t)⟹ψ(t)⟹ψm,n(t)ψm,n(t)=2m/2ψ(2mt−n)m,n∈Z
小波信号
ψ
m
,
n
(
t
)
{\color{Tomato}\psi_{m,n}(t)}
ψm,n(t)设计为尺度信号
ϕ
m
,
n
(
t
)
{\color{Green}\phi_{m,n}(t)}
ϕm,n(t)的正交信号,即存在
<
ϕ
m
,
n
(
t
)
,
ψ
m
,
n
(
t
)
>
=
∫
ϕ
m
,
n
(
t
)
⋅
ψ
m
,
n
(
t
)
d
t
=
0
<\phi_{m,n}(t),\psi_{m,n}(t)>=\int \phi_{m,n}(t)\cdot\psi_{m,n}(t)\,dt=0
<ϕm,n(t),ψm,n(t)>=∫ϕm,n(t)⋅ψm,n(t)dt=0

多尺度分析是通过函数空间术语来严格定义的,假设 L 2 ( R ) L^2(R) L2(R)空间内的子空间序列 V m ( m ∈ Z ) V_m(m∈Z) Vm(m∈Z)满足以下条件:
- (嵌套性) ⋯ V 2 ⊂ V 1 ⊂ ⋯ ⊂ V − 2 ⊂ ⋯ ; \cdots V_2\subset V_1\subset\cdots\subset V_{-2}\subset\cdots; ⋯V2⊂V1⊂⋯⊂V−2⊂⋯;
- (逼近性) ⋂ m ∈ Z V m = { 0 } , ⋃ m ∈ Z V m = L 2 ( R ) ; \bigcap_{m∈Z} V_m=\{0\},\bigcup_{m∈Z} V_m=L^2(R); ⋂m∈ZVm={0},⋃m∈ZVm=L2(R);
- (二进制伸缩性) f ( t ) ∈ V m ⇔ f ( 2 t ) ∈ V m − 1 f(t)∈V_m\Leftrightarrow f(2t)∈V_{m-1} f(t)∈Vm⇔f(2t)∈Vm−1
- V m = s p a n { ϕ m , n ( t ) , n ∈ Z } V_{\color{Red}m}=span\{\phi_{{\color{Red}m},n}(t),n∈Z\} Vm=span{ϕm,n(t),n∈Z},即任一级子空间可由相应尺度的同一函数通过平移张成;
- V m − 1 = V m ⊕ W m V_{m-1}=V_m\oplus W_m Vm−1=Vm⊕Wm,即任一级子空间可由下一级子空间以及它的正交补空间相加而成,序列 W m W_m Wm相互之间无重叠,是正交系。
这样,我们称子空间序列 V m , W m V_m,W_m Vm,Wm为函数空间 L 2 ( R ) L^2(R) L2(R)上的一个多尺度分析,其中 ϕ m , n \phi_{m,n} ϕm,n称为尺度函数,m,n分别是尺度和平移参数。
由以上定义可得
V
0
=
V
m
⊕
∑
i
=
1
m
W
i
(3.1.1)
V_{0}=V_m\oplus \sum_{i=1}^{m}W_i \tag{3.1.1}
V0=Vm⊕i=1∑mWi(3.1.1)
特别地,当尺度趋于无穷时,上式变为
L
2
(
R
)
=
∑
i
=
−
∞
∞
W
i
(3.1.2)
L^2(R)=\sum_{i=-∞}^{∞}W_i \tag{3.1.2}
L2(R)=i=−∞∑∞Wi(3.1.2)
存在与
ϕ
m
,
n
\phi_{m,n}
ϕm,n相应的函数
ψ
m
,
n
\psi_{m,n}
ψm,n通过平移能够张成
W
m
W_m
Wm。
W
m
=
s
p
a
n
{
ψ
m
,
n
(
t
)
}
(3.1.3)
W_m=span\{\psi_{m,n}(t)\} \tag{3.1.3}
Wm=span{ψm,n(t)}(3.1.3)
ψ
m
,
n
\psi_{m,n}
ψm,n就是所求的小波基,它在伸缩和平移变换下都是正交的。
3.2 Mallat算法
多尺度分析在信号分析中的应用可以用式(3.1)来表达
对于任意函数 f ( t ) ∈ V 0 f(t)∈V_0 f(t)∈V0,可以在下一级尺度空间 V 1 V_1 V1和小波空间 W 1 W_1 W1上进行分解,如下所示:
f ( t ) = p 1 f ( t ) + q 1 f ( t ) f(t)=p_1f(t)+q_1f(t) f(t)=p1f(t)+q1f(t)
式中 p 1 f ( t ) = ∑ k C 1 k ϕ 1 , k p_1f(t)=\sum_{k}C_{1k}\phi_{1,k} p1f(t)=∑kC1kϕ1,k, q 1 f ( t ) = ∑ k D 1 k ψ 1 , k q_1f(t)=\sum_{k}D_{1k}\psi_{1,k} q1f(t)=∑kD1kψ1,k。
p 1 f ( t ) p_1f(t) p1f(t)是逼近部分, q 1 f ( t ) q_1f(t) q1f(t)是细节部分。然后将逼近部分进一步分解,如此重复就可得到任意尺度上的逼近部分和细节部分,迭代公式为
p m − 1 f ( t ) = p m f ( t ) + q m f ( t ) = ∑ k C m k ϕ m , k + D m k ψ m , k p_{m-1}f(t)=p_mf(t)+q_mf(t)=\sum_{k}C_{mk}\phi_{m,k}+D_{mk}\psi_{m,k} pm−1f(t)=pmf(t)+qmf(t)=k∑Cmkϕm,k+Dmkψm,k
式中 C m = H C m − 1 C_m=HC_{m-1} Cm=HCm−1, D m = G C m − 1 D_m=GC_{m-1} Dm=GCm−1,H是低通滤波器。每一次分解, p m f ( t ) p_mf(t) pmf(t)的采样都比原来稀疏两倍,采样率越来越粗,波形越来越光滑;G是H的镜像高通滤波器,带宽每次也以两倍缩减。
经过m次分解,得到
f ( t ) = p m f ( t ) + ∑ j = 1 m q j f ( t ) f(t)=p_mf(t)+\sum_{j=1}^{m}q_jf(t) f(t)=pmf(t)+j=1∑mqjf(t)
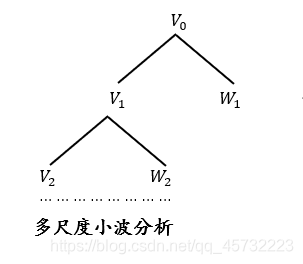
式中 p m f ( t ) p_mf(t) pmf(t)给出的是函数 f ( t ) f(t) f(t)的低频全局信息,第二次是逐次分解中分离的从 V 0 V_0 V0到 V m − 1 V_{m-1} Vm−1各个尺度上 f ( t ) f(t) f(t)的相应局部细节信息。上述信号分解过程称之为Mallat算法。
其过程如图所示:
3.3 常用的正交小波基函数
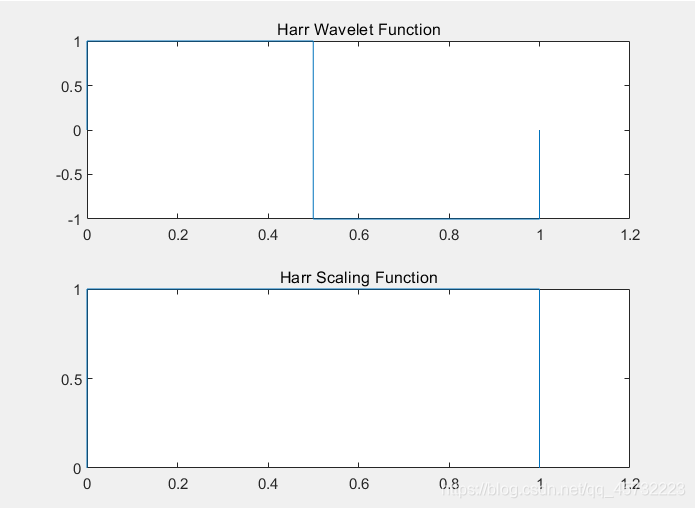
常用的正交小波基有Haar小波、Meyer小波、Daubechies小波。
- Haar小波
%%********** Haar 小波函数 **********%%
[phi,psi,xval]=wavefun('haar',20);
figure;
subplot(2,1,1); plot(xval,psi); title('Harr Wavelet Function');
subplot(2,1,2); plot(xval,phi); title('Harr Scaling Function');
-
Meyer小波
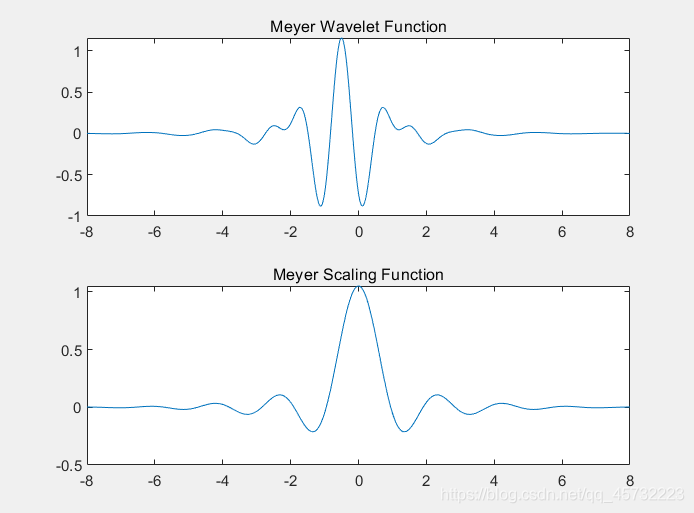
-
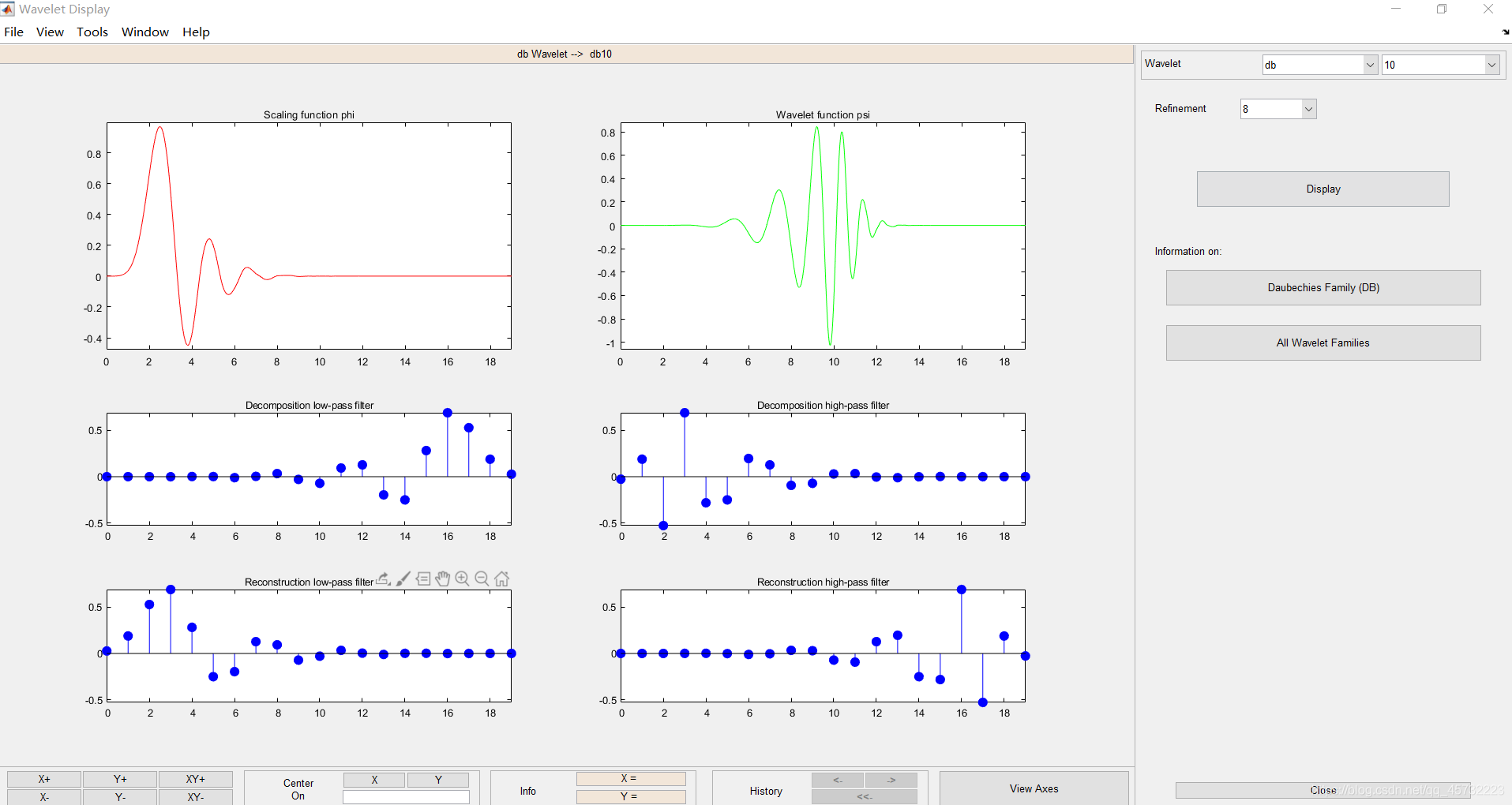
Daubechies 小波
4. 小波包(Wavelet Packet)
4.1 原理
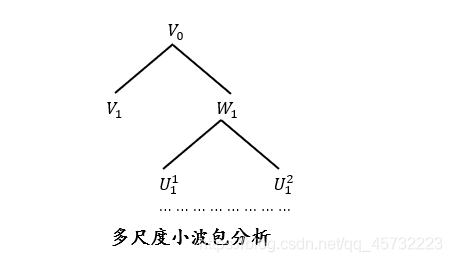
在多尺度分析中,每一步分解都只是对尺度子空间 V i V_i Vi进行,对子空间 W i W_i Wi则不再分解,因此高频跨度较宽。实际中,在很多问题中,我们只是对某些特定时间和频域段(点)的信号感兴趣,只要提取这些位置的信息即可。为此,我们希望在感兴趣的频率点上最大可能地提高频率分辨率,在感兴趣的时间点上最大程度地提高时间分辨率,此时正交小波不再满足这种要求。
这需要对子空间 W i W_i Wi也一样进行分解,以提高频率分辨率,称为小波包分解。
4.2 分解过程
其过程如图所示:
对小波子空间 W i W_i Wi可以像尺度子空间 V i V_i Vi一样利用镜像滤波器进行正交分解,对其频带进行分割。将其子空间用符号 U U U统一表示,子空间分解的公式为
U i m = U i − 1 2 m ⊕ U i − 1 2 m + 1 (4.2.1) U_{i}^{m}=U_{i-1}^{2m}\oplus U_{i-1}^{2m+1} \tag{4.2.1} Uim=Ui−12m⊕Ui−12m+1(4.2.1)
式中下标表示尺度层次,上标区别同一层上不同的子空间。
按照式(4.2.2),小波子空间 W i = U i 1 W_i=U_{i}^{1} Wi=Ui1可以如下分解:
W i = U i − 1 2 ⊕ U i − 1 3 W i = U i − 2 4 ⊕ U i − 2 5 ⊕ U i − 2 6 ⊕ U i − 2 7 W i = U i − k 2 k ⊕ U i − k 2 k + 1 ⊕ ⋯ ⊕ U i − k 2 k + 1 − 1 (4.2.2) \begin{aligned} W_i&=U_{i-1}^{2}\oplus U_{i-1}^{3} \\ W_i&=U_{i-2}^{4}\oplus U_{i-2}^{5}\oplus U_{i-2}^{6}\oplus U_{i-2}^{7}\tag{4.2.2}\\ W_i&=U_{i-k}^{2^k}\oplus U_{i-k}^{2^k+1}\oplus \cdots \oplus U_{i-k}^{2^{k+1}-1} \end{aligned} WiWiWi=Ui−12⊕Ui−13=Ui−24⊕Ui−25⊕Ui−26⊕Ui−27=Ui−k2k⊕Ui−k2k+1⊕⋯⊕Ui−k2k+1−1(4.2.2)
每层小波包将原频带一分为二, k k k层小波包可将原频带分割为 2 k 2^k 2k个子频带,从而实现频带细分,提高了频率分辨率。对整个小波包来说,它是一个按二进制组织的包含从宽到窄各个频带的带通滤波器组,各种应用都能够从中找到符合需求的最优组合。可以通过构造代价函数来计算如何实现最优(利益最大化或代价最小化)。
参考资料:Matlab 时频分析技术及其应用/葛哲学,陈仲生编著.–北京:人民邮电出版社,2006.1

















 1215
1215

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









