







Skip-connected 3D DenseNet for volumetric infant brain MRI segmentation
方法
与Unet做一个对比
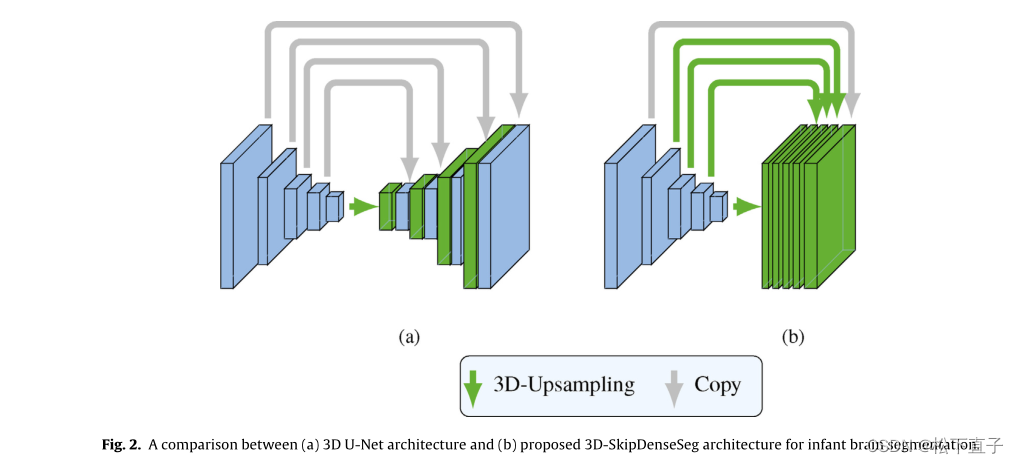
网络结构
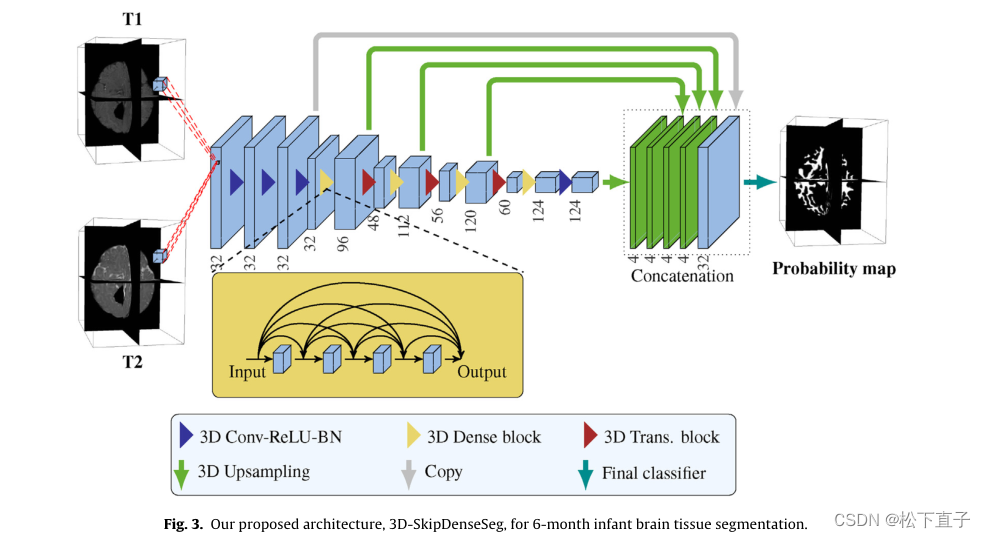
结构比较简单
注意的时3D Trans是指代过渡层:有卷积,池化组成
代码:
import torch
import torch.nn as nn
from collections import OrderedDict
class _DenseLayer(nn.Sequential):
def __init__(self, num_input_features, growth_rate, bn_size, drop_rate):
super(_DenseLayer, self).__init__()
self.add_module('norm1', nn.BatchNorm3d(num_input_features)),
self.add_module('relu1', nn.ReLU(inplace=True)),
self.add_module('conv1', nn.Conv3d(num_input_features, bn_size *
growth_rate, kernel_size=1, stride=1, bias=False)),
self.add_module('norm2', nn.BatchNorm3d(bn_size * growth_rate)),
self.add_module('relu2', nn.ReLU(inplace=True)),
self.add_module('conv2', nn.Conv3d(bn_size * growth_rate, growth_rate,
kernel_size=3, stride=1, padding=1, bias=False)),
self.drop_rate = drop_rate
if self.drop_rate > 0:
self.drop_layer = nn.Dropout(p=self.drop_rate)
def forward(self, x):
new_features = super(_DenseLayer, self).forward(x)
if self.drop_rate > 0:
new_features = self.drop_layer(new_features)
return torch.cat([x, new_features], 1)
class _DenseBlock(nn.Sequential):
def __init__(self, num_layers, num_input_features, bn_size, growth_rate, drop_rate):
super(_DenseBlock, self).__init__()
for i in range(num_layers):
layer = _DenseLayer(num_input_features + i * growth_rate, growth_rate, bn_size, drop_rate)
self.add_module('denselayer%d' % (i + 1), layer)
class _Transition(nn.Sequential):
def __init__(self, num_input_features, num_output_features):
super(_Transition, self).__init__()
self.add_module('norm', nn.BatchNorm3d(num_input_features))
self.add_module('relu', nn.ReLU(inplace=True))
self.add_module('conv', nn.Conv3d(num_input_features, num_output_features,
kernel_size=1, stride=1, bias=False))
self.add_module('pool_norm', nn.BatchNorm3d(num_output_features))
self.add_module('pool_relu', nn.ReLU(inplace=True))
self.add_module('pool', nn.Conv3d(num_output_features, num_output_features, kernel_size=2, stride=2))
# TODO test model
class SkipDenseNet3D(nn.Module):
def __init__(self, in_channels=1, classes=1, growth_rate=16, block_config=(4, 4, 4, 4), num_init_features=32, drop_rate=0.1,
bn_size=4):
super(SkipDenseNet3D, self).__init__()
self.num_classes = classes
# First three convolutions
self.features = nn.Sequential(OrderedDict([
('conv0', nn.Conv3d(in_channels, num_init_features, kernel_size=3, stride=1, padding=1, bias=False)),
('norm0', nn.BatchNorm3d(num_init_features)),
('relu0', nn.ReLU(inplace=True)),
('conv1', nn.Conv3d(num_init_features, num_init_features, kernel_size=3, stride=1, padding=1, bias=False)),
('norm1', nn.BatchNorm3d(num_init_features)),
('relu1', nn.ReLU(inplace=True)),
('conv2', nn.Conv3d(num_init_features, num_init_features, kernel_size=3, stride=1, padding=1, bias=False)),
]))
self.features_bn = nn.Sequential(OrderedDict([
('norm2', nn.BatchNorm3d(num_init_features)),
('relu2', nn.ReLU(inplace=True)),
]))
self.conv_pool_first = nn.Conv3d(num_init_features, num_init_features, kernel_size=2, stride=2, padding=0,
bias=False)
# Each denseblock
num_features = num_init_features
self.dense_blocks = nn.ModuleList([])
self.transit_blocks = nn.ModuleList([])
self.upsampling_blocks = nn.ModuleList([])
for i, num_layers in enumerate(block_config):
block = _DenseBlock(num_layers=num_layers, num_input_features=num_features,
bn_size=bn_size, growth_rate=growth_rate, drop_rate=drop_rate)
self.dense_blocks.append(block)
num_features = num_features + num_layers * growth_rate
up_block = nn.ConvTranspose3d(num_features, classes, kernel_size=2 ** (i + 1) + 2,
stride=2 ** (i + 1),
padding=1, groups=classes, bias=False)
self.upsampling_blocks.append(up_block)
if i != len(block_config) - 1:
trans = _Transition(num_input_features=num_features, num_output_features=num_features // 2)
self.transit_blocks.append(trans)
# self.features.add_module('transition%d' % (i + 1), trans)
num_features = num_features // 2
# Final batch norm
# self.features.add_module('norm5', nn.BatchNorm3d(num_features))
# Linear layer
# self.classifier = nn.Linear(num_features, num_classes)
# self.bn4 = nn.BatchNorm3d(num_features)
# ----------------------- classifier -----------------------
self.bn_class = nn.BatchNorm3d(classes * 4 + num_init_features)
self.conv_class = nn.Conv3d(classes * 4 + num_init_features, classes, kernel_size=1, padding=0)
self.relu_last = nn.ReLU()
# ----------------------------------------------------------
if classes == 1:
self.Softmax_layer = nn.Sigmoid()
else:
self.Softmax_layer = nn.Softmax(dim=1)
# Official init from torch repo.
for m in self.modules():
if isinstance(m, nn.Conv3d):
nn.init.kaiming_normal_(m.weight)
# nn.Conv3d.bias.data.fill_(-0.1)
elif isinstance(m, nn.BatchNorm3d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
def forward(self, x):
first_three_features = self.features(x)
first_three_features_bn = self.features_bn(first_three_features)
out = self.conv_pool_first(first_three_features_bn)
out = self.dense_blocks[0](out)
up_block1 = self.upsampling_blocks[0](out)
out = self.transit_blocks[0](out)
out = self.dense_blocks[1](out)
up_block2 = self.upsampling_blocks[1](out)
out = self.transit_blocks[1](out)
out = self.dense_blocks[2](out)
up_block3 = self.upsampling_blocks[2](out)
out = self.transit_blocks[2](out)
out = self.dense_blocks[3](out)
up_block4 = self.upsampling_blocks[3](out)
out = torch.cat([up_block1, up_block2, up_block3, up_block4, first_three_features], 1)
# ----------------------- classifier -----------------------
out = self.conv_class(self.relu_last(self.bn_class(out)))
# ----------------------------------------------------------
return self.Softmax_layer(out)
return out
总的来说,代码不复杂
















 2716
2716











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











