







花了一晚上+一早上完成总线舵机的大部分常用指令编写,分享给大家,只要安装pyserial即可使用~
总线舵机
我买的是某宝上亚博的智能总线舵机,用来做机械臂。

舵机优势
有位置反馈,这对做机器人、机械臂十分有帮助,可以进行运动学解算。

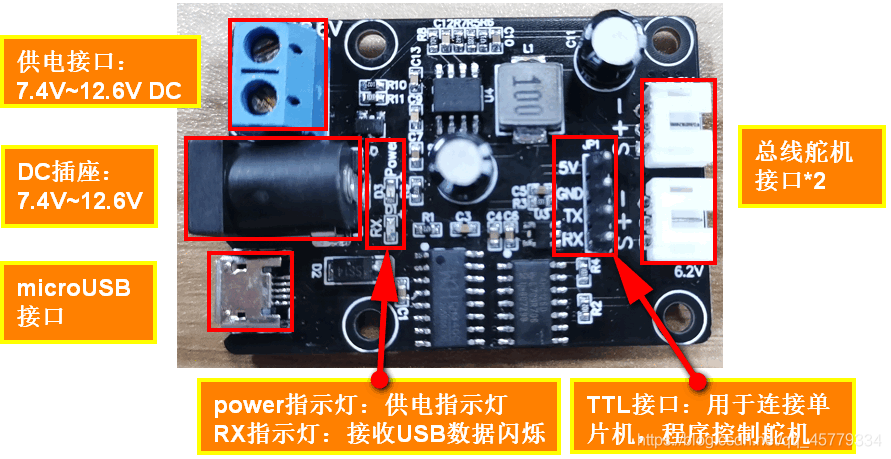
驱动板
总线协议

驱动库
'''
@Author: Irving.Gao
@Date: 2021-05-02 22:02:20
@Last Modified by: Irving.Gao
@Last Modified time: 2021-05-02 22:02:20
'''
# -*- coding:UTF-8 -*-
import time
import serial
class Serservo:
'''
@串行舵机控制驱动库
@方法:
设置ID: serial_servo_set_ID(id)
查询舵机:serial_servo_ping(id)
读取舵机:serial_servo_read(id)
写舵机: serial_servo_write(id, pos, time)
同步控制:serial_servo_sync_write(id_list, pos_list, time_list)
异步控制:serial_servo_reg_write(id_list, pos_list, time_list)
关闭通信:serial_servo_close()
'''
def __init__(self, port):
self.ser = serial.Serial(port, 115200, timeout=0.001)
# 通信协议
# data = [head_1, head_2, id, len, cmd, addr, pos1, pos2, time1, time2, checknum]
# 通信协议数据常量
self.head_1 = 0xFF
self.head_2 = 0xFF
self.all_id = 0xFE
# 数据长度
self.len_ping = 0x02 # 查询指令长度
self.len_write = 0x07 # 写指令长度
self.len_read = 0x04 # 读指令长度
self.len_action = 0x02 # 执行异步写指令长度
# 控制指令常量
self.cmd_ping = 0x01 # 查询舵机
self.cmd_read_data = 0x02 # 查询指定地址的数据
self.cmd_write_data = 0x03 # 向指定地址写数据
self.cmd_reg_write = 0x04 # 向指定地址预写数据,等收到 向指定地址预写数据,等收到 ACTIONACTION ACTION ACTION指令后才执行,主要用于控制多个舵机 指令后才执行,主要用于控制多个舵机 时能让舵机同启动
self.cmd_action = 0x05 # 触发执行REG WRITE指令
self.cmd_reset = 0x06 # 把寄存器恢复为出厂设定值
self.cmd_sync_write = 0x83 # 用于同时向多个舵机写入不参数
# 控制指令对应地址
self.addr_id = 0x05 # 舵机ID
self.addr_write = 0x2A # 目标位置 0-4095
self.addr_write_L = 0x2A # 目标位置 0-4095
self.addr_write_H = 0x2B # 目标位置 0-4095
self.addr_runtime_L = 0x2C # 运行时间 ms
self.addr_runtime_H = 0x2D # 运行时间 ms
self.addr_read = 0x38 # 当前位置 0-4095
self.addr_read_L = 0x38 # 当前位置 0-4095
self.addr_read_H = 0x39 # 当前位置 0-4095
# 控制指令写入的参数
self.param_read = 0x02 # 当前位置 0-4095
def serial_servo_ping(self, id):
'''
@函数功能:检查对应id的舵机是否存在
@输入参数:
id: 1-250 舵机ID
'''
checknum = (~(id + self.len_ping + self.cmd_ping)) & 0xff
data = [self.head_1,
self.head_2,
id,
self.len_ping,
self.cmd_ping,
checknum]
self.ser.write(bytes(data)) # 发送读取指令
time.sleep(0.001)
rev_data = self.ser.readline() # 读取舵机返回指令
rev_data = rev_data.hex()
if rev_data != "":
# 示例:fff5030200fa >——> 参数:0200
ping_data = str(rev_data[8:10]) # 提取出返回参数
ping_status = int(ping_data, 10) # 将字符串转换成10进制
if ping_status == 0:
print("the {} servo is available".format(id))
else:
print("the {} servo is not detected".format(id))
def serial_servo_read(self, id):
'''
@函数功能:读取总线舵机位置。
@输入参数:
id: 1-250 舵机ID
@返回参数:
pos: 0-4095 舵机的位置
'''
checknum = (~(id + self.len_read + self.cmd_read_data + self.addr_read + self.param_read)) & 0xff
data = [self.head_1,
self.head_2,
id,
self.len_read,
self.cmd_read_data,
self.addr_read,
self.param_read,
checknum]
self.ser.write(bytes(data)) # 发送读取指令
time.sleep(0.001)
rev_data = self.ser.readline() # 读取舵机返回指令
rev_data = rev_data.hex()
if rev_data != "":
# 示例:fff50104000c1cd2 >——> 参数:0c1c
pos = str(rev_data[10:14]) # 提取出返回参数
pos = int(pos, 16) # 将字符串转换成16进制
else:
pos = None
return pos
def serial_servo_write(self, id, pos, tim):
'''
@函数功能:设置总线舵机角度接口。
@输入参数:
id: 1-250 舵机ID
pos: 0-4095 舵机的位置
time: 运动时间
'''
pos_H = (pos >> 8) & 0xFF
pos_L = pos & 0xFF
time_H = (tim >> 8) & 0xFF
time_L = tim & 0xFF
checknum = (~(id + self.len_write + self.cmd_write_data + self.addr_write + pos_H + pos_L + time_H + time_L)) & 0xff
data = [self.head_1,
self.head_2,
id,
self.len_write,
self.cmd_write_data,
self.addr_write,
pos_H,
pos_L,
time_H,
time_L,
checknum]
self.ser.write(bytes(data))
time.sleep(tim/1000) # 延时让机械臂完成动作
def serial_servo_reg_write(self, id_list, pos_list, time_list):
'''
@函数功能:异步设置总线舵机角度接口。
@输入参数:
id_list: [id1,id2,...] 1-250 舵机ID
pos_list: [pos1,pos2,...] 0-4095 舵机的位置
time_list: [time1,time2,...] 运动时间
'''
# data_list = []
print(id_list)
if len(id_list) != len(pos_list) or len(id_list) != len(time_list) or len(pos_list) != len(time_list):
print("params are incorroct!")
return None
for i in range(len(id_list)):
# print(i)
# i += 1
id = id_list[i]
pos_H = (pos_list[i] >> 8) & 0xFF
pos_L = pos_list[i] & 0xFF
time_H = (time_list[i] >> 8) & 0xFF
time_L = time_list[i] & 0xFF
# data_list.append([pos_H, pos_L, time_H, time_L])
reg_checknum = (~(id + self.len_write + self.cmd_reg_write + self.addr_write + pos_H + pos_L + time_H + time_L)) & 0xff
reg_data = [self.head_1,
self.head_2,
id,
self.len_write,
self.cmd_reg_write,
self.addr_write,
pos_H,
pos_L,
time_H,
time_L,
reg_checknum]
self.ser.write(bytes(reg_data))
time.sleep(0.01)
act_checknum = (~(self.all_id + self.len_action + self.cmd_action)) & 0xff
action_data = [self.head_1,
self.head_2,
self.all_id,
self.len_action,
self.cmd_action,
act_checknum]
self.ser.write(bytes(action_data))
time.sleep(max(time_list)/1000) # 延时让机械臂完成动作
def serial_servo_sync_write(self, id_list, pos_list, time_list):
'''
@函数功能:同步设置多个总线舵机位置。
@输入参数:
id_list: [id1,id2,...] 1-250 舵机ID
pos_list: [pos1,pos2,...] 0-4095 舵机的位置
time_list: [time1,time2,...] 运动时间
'''
if len(id_list) != len(pos_list) or len(id_list) != len(time_list) or len(pos_list) != len(time_list):
print("params are incorroct!")
return None
sync_params = []
sum_params = 0
for i in range(len(id_list)):
# print(i)
# i += 1
id = id_list[i]
pos_H = (pos_list[i] >> 8) & 0xFF
pos_L = pos_list[i] & 0xFF
time_H = (time_list[i] >> 8) & 0xFF
time_L = time_list[i] & 0xFF
sync_params += [id, pos_H, pos_L, time_H, time_L]
sum_params = sum(sync_params) # 写入的参数求和
len_data = len(sync_params) + 2 + 2 # 数据长度 N(参数)+2
len_servo_params = len(id_list) * 2 # 要给舵机写入的数据长度
sync_checknum = (~(self.all_id + len_data + self.cmd_sync_write + self.addr_write + len_servo_params + sum_params)) & 0xff
sync_data = [self.head_1,
self.head_2,
self.all_id,
len_data,
self.cmd_sync_write,
self.addr_write,
len_servo_params] + \
sync_params + \
[sync_checknum]
self.ser.write(bytes(sync_data))
time.sleep(max(time_list)/1000) # 延时让机械臂完成动作
def serial_servo_set_ID(self, id):
'''
@函数功能:设置单个舵机的id编号,使用时务必确保只连接了单个舵机。
@输入参数:
id: 1-250 舵机ID
'''
checknum = (~(self.all_id + self.len_write + self.cmd_write_data + self.addr_id + id)) & 0xff
data = [self.head_1,
self.head_2,
self.all_id,
self.len_write,
self.cmd_write_data,
self.addr_id,
id,
checknum]
self.ser.write(bytes(data))
def serial_servo_close(self):
'''
@函数功能:关闭机械臂串行通信
'''
self.ser.close()

















 874
874

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









