







前几天刚刚做了一个vrep小车仿真轨迹模拟的gui
注意到,之前的文章,是利用matlab给小车发送位置,然后小车移动的,如果现在我们需要使用键盘控制小车移动呢?
下面这个demo中,使用键盘控制小车移动,键盘W键向上移动,键盘D键向右,A键向左
在分析小车运动时,一个很重要的参数就是小车的三个轮子的运动速度,而小车的轮子属于joint类型

[查找文档](Enabling the B0-based remote API - client side (coppeliarobotics.com)),B0-Based api有个得到这种组件速度的api,但是无奈我的pc机没有配置,并且也没有找到配置的方法qwq
故只能采取先在仿真软件中读出来,再与matlab通讯,得到速度
在仿真软件中:
先找到这个绑定在小车的脚本
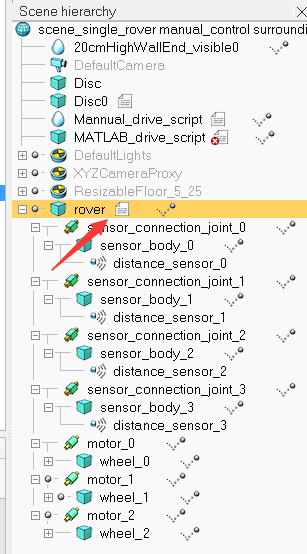
双击打开,看到这里14行已经写好了获得速度的语句
--get motor initial speed
v0 = sim.getJointTargetVelocity(motor_0);
v1 = sim.getJointTargetVelocity(motor_1);
v2 = sim.getJointTargetVelocity(motor_2);
随后需要想办法把这个速度给发送到matlab,查阅资料发现,vrep和matlab通讯需要通过如下两个api
setStringSignal通过通信接口,将字符串信号发送GetStringSignal将字符串信号接受
当然发送前肯定需要把字符串转化为信号,接受后要重新解析
packFloatTableUnpackFloats
所以在vrep中的sysCall_actuation中,添加如下代码
-- added
Velocity={};
table.insert(Velocity,v0);
table.insert(Velocity,v1);
table.insert(Velocity,v2);
print("Hello")
print(Velocity)
print("world")
Velocity = sim.packFloatTable(Velocity) -----------------------added
sim.setStringSignal('scan Velocity', Velocity) ----------------added
在matlab的pushbutton1_Callback中进入循环时添加
[returnCode,Velocities]=vrep.simxGetStringSignal(clientID,'scan Velocity',vrep.simx_opmode_oneshot);
% Velocities
Velocities=vrep.simxUnpackFloats(Velocities);
然后在matlab的gui中添加元素,即可显示
后面想办法加了一些小玩意
- 加了一个小车的模型图表示小车实时位置

- 加了一个示意图和表示速度大小和方向的箭头
(tips:刷新图窗记得使用drawnow函数!中断间隔也需要取合适的值)
完整视频演示如下
资源自取
















 745
745











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











