







上一篇讲了伪逆矩阵,本篇我们讲投影矩阵。
目录
二、投影矩阵
投影矩阵是广泛应用于线性代数、矩阵计算、线性回归、奇异值分解中的一类幂等矩阵。投影矩阵广泛应用于线性代数中的矩阵运算,线性回归中以及qr分解,奇异值分解。
◼ 投影矩阵
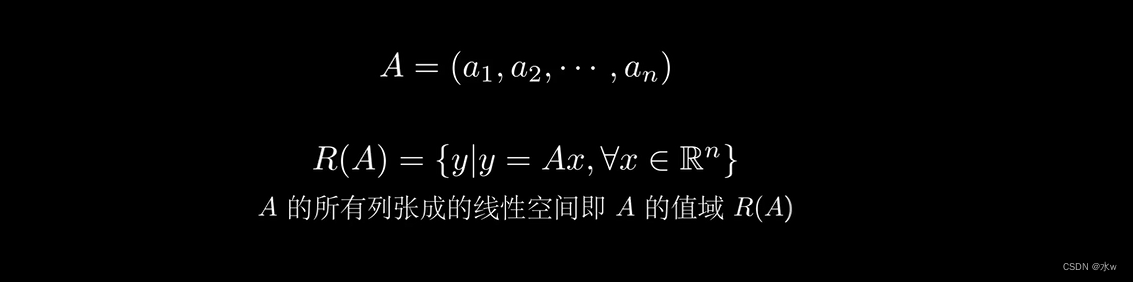
在介绍投影矩阵之前,需要先引入一个概念:矩阵的值域
一个矩阵的所有列张成的线性空间就是A的值域。
在一个二维空间中,一条直线是由2个向量决定的。一个是其方向向量,另一个是其位置向量,或者说是法线向量。
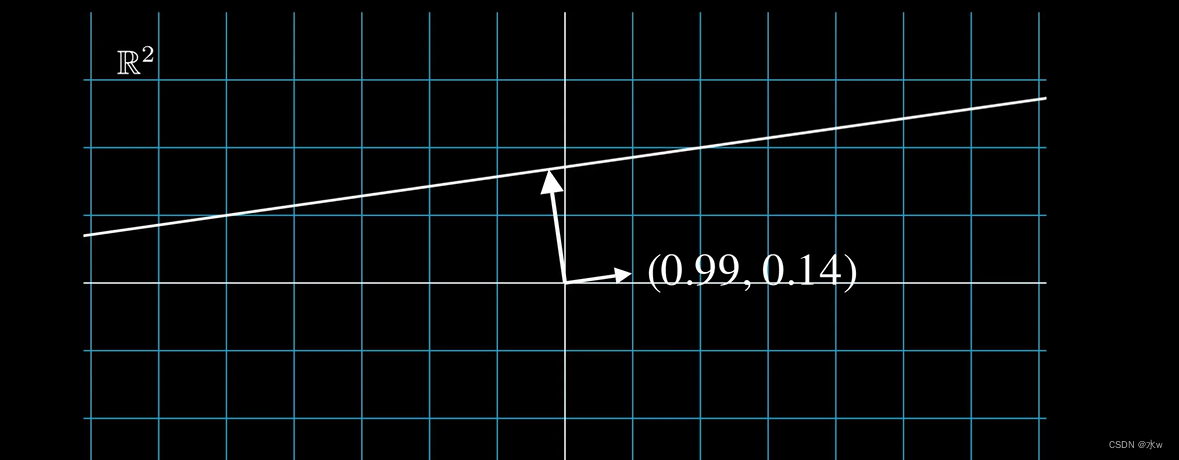
那么这两个向量的无数线性组合,即两个向量构成的矩阵的值域,就张成了这样一个二维空间。如果只有直线的方向向量,就张成了二维向量的一维子空间,以为一维空间上是没有二维位置信息的,所有我们不关注法线向量。
现在我们在二维空间中,有一个点,想求助它在一维子空间中的投影。我们只需要求出点向量的模长以及它与一维子空间的夹角,再乘以一维子空间的单位方向向量,就可以得到投影向量在二维空间的表示了。
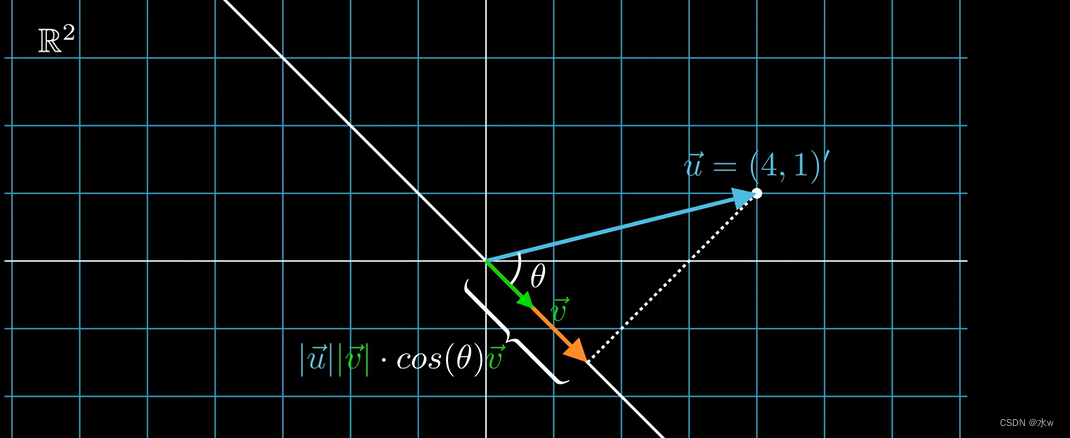
这里我们注意到点向量的模长乘以单位方向向量的模长,再乘以它们夹角的余弦值,这其实就是两个向量点积的定义。
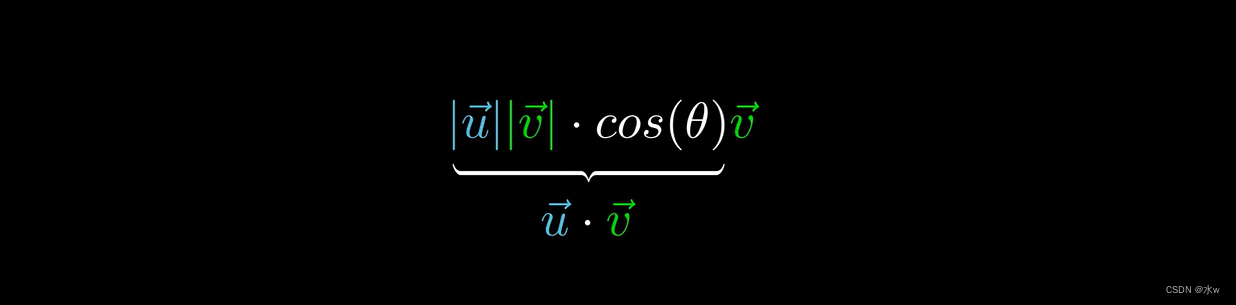
至此,我们就得到了投影的向量求法。
到了三维空间中,两个不共线的三维向量就张成了一个二维子空间平面,我们想求出一个三维空间上的点,到这样一个二维空间上的投影,该怎么求?
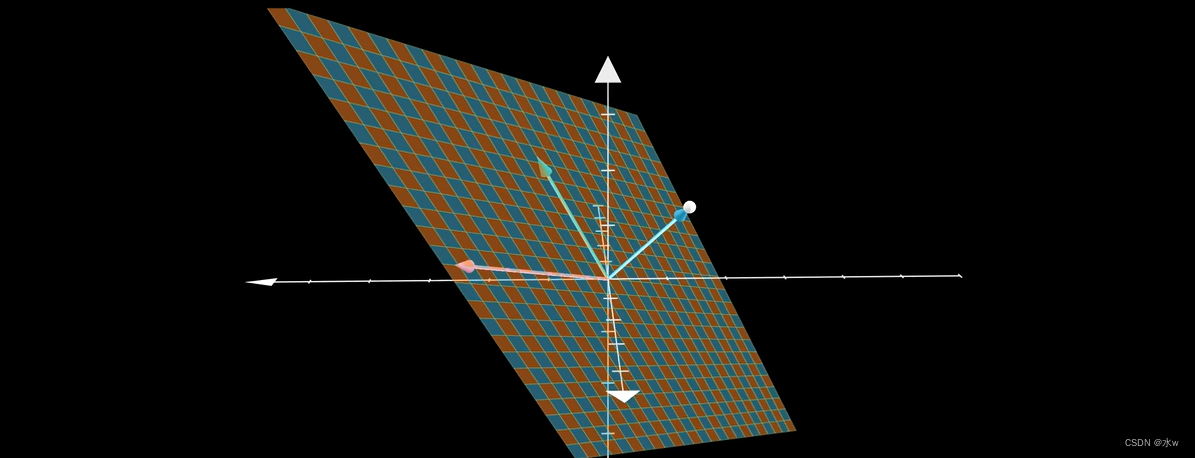
在一个m维空间中,由n个线性无关的向量构成矩阵A张成了一个n维子空间平面,那么m维空间中的任意点想要投影到这样一个n维空间上,就需要通过一个投影矩阵P。

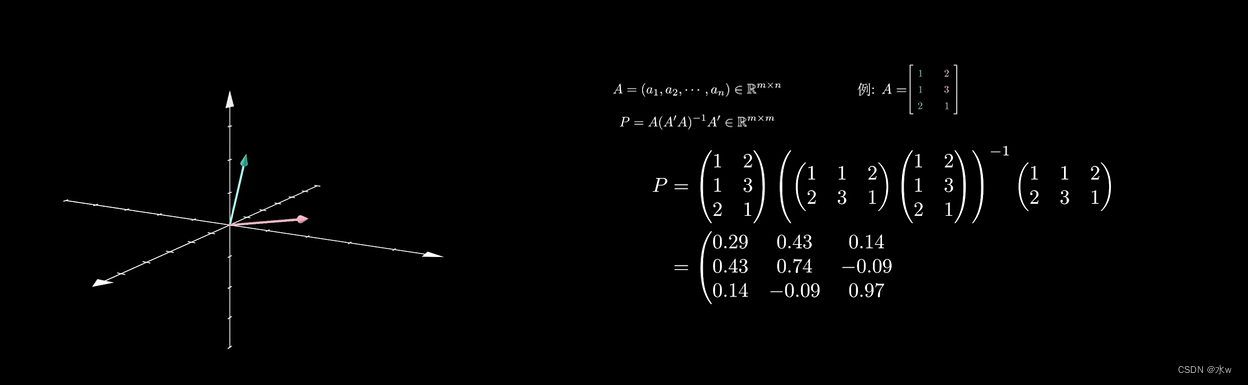
◼ 举例
例如,三维空间中,有两个线性无关的三维向量112和231,张成的一个2维子空间平面,那么投影到这个二维子空间平面上的投影矩阵就可以由公式求得。
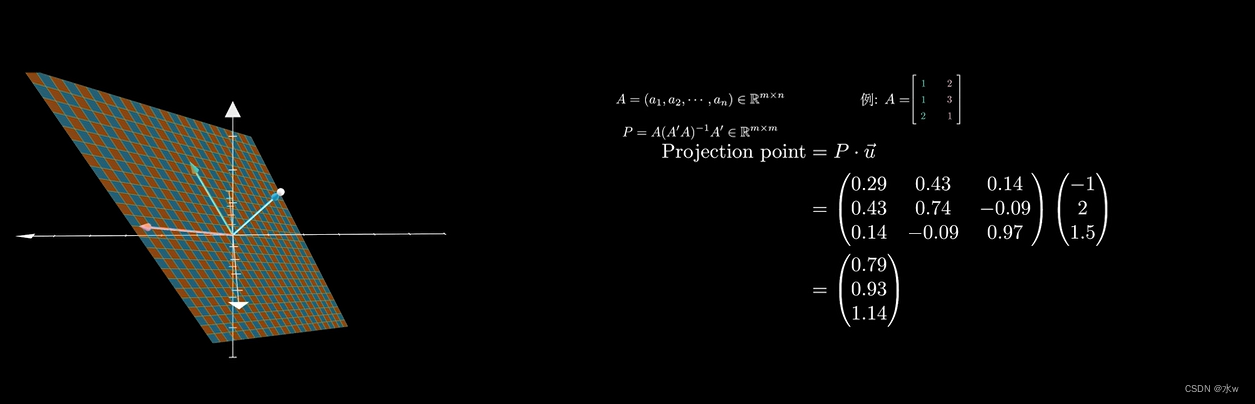
再将其乘以点向量就可以得到投影点的三维表示。
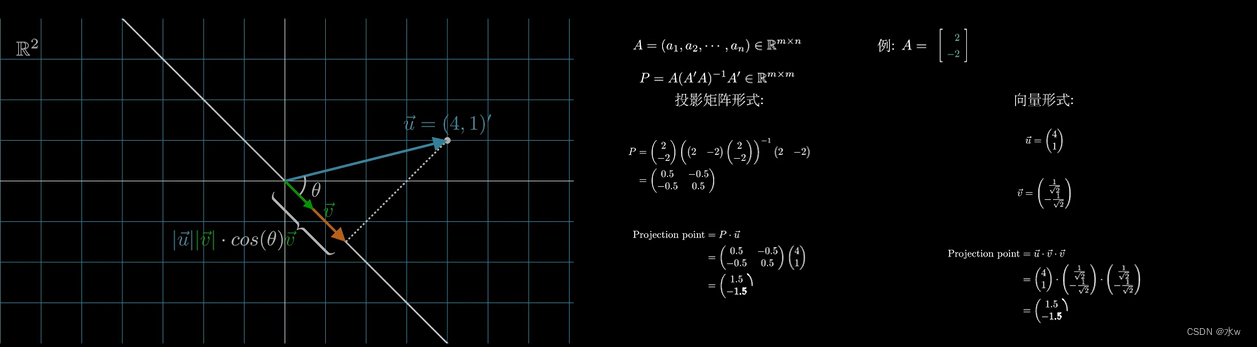
同理,二维空间的子空间是一条直线,我们只需要其方向向量来张成子空间直线,(这里将投影矩阵和向量求法进行了对比,利用看到两种方法的结果是一样的。)
问题:在n维空间中,如果有n个线性无关的向量张成的子空间的投影矩阵是什么样子的?
这里,分别对二维和三维进行了计算,可以看出它们的投影矩阵就是n维的单位矩阵。
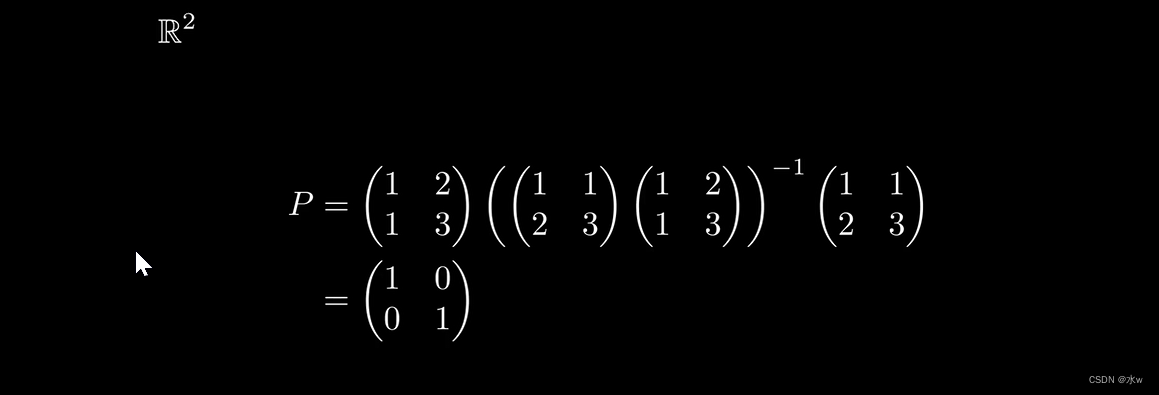
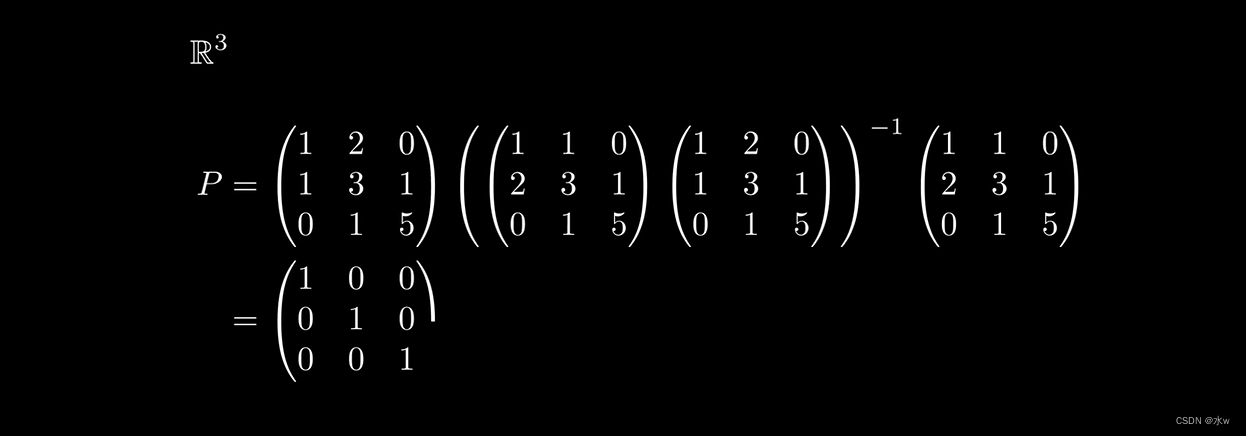 这也很好理解,因为n维空间是由有n个线性无关的向量张成的,任何一点投影到自身所在的空间,必定还是自身。所以投影矩阵是单位矩阵,从而不改变其位置。
这也很好理解,因为n维空间是由有n个线性无关的向量张成的,任何一点投影到自身所在的空间,必定还是自身。所以投影矩阵是单位矩阵,从而不改变其位置。


















 6190
6190

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











