







标题第七章-编码器测速
7.1-认识编码器
编码器:一般按照电机尾部、用于测量电机转速、方向、位置。
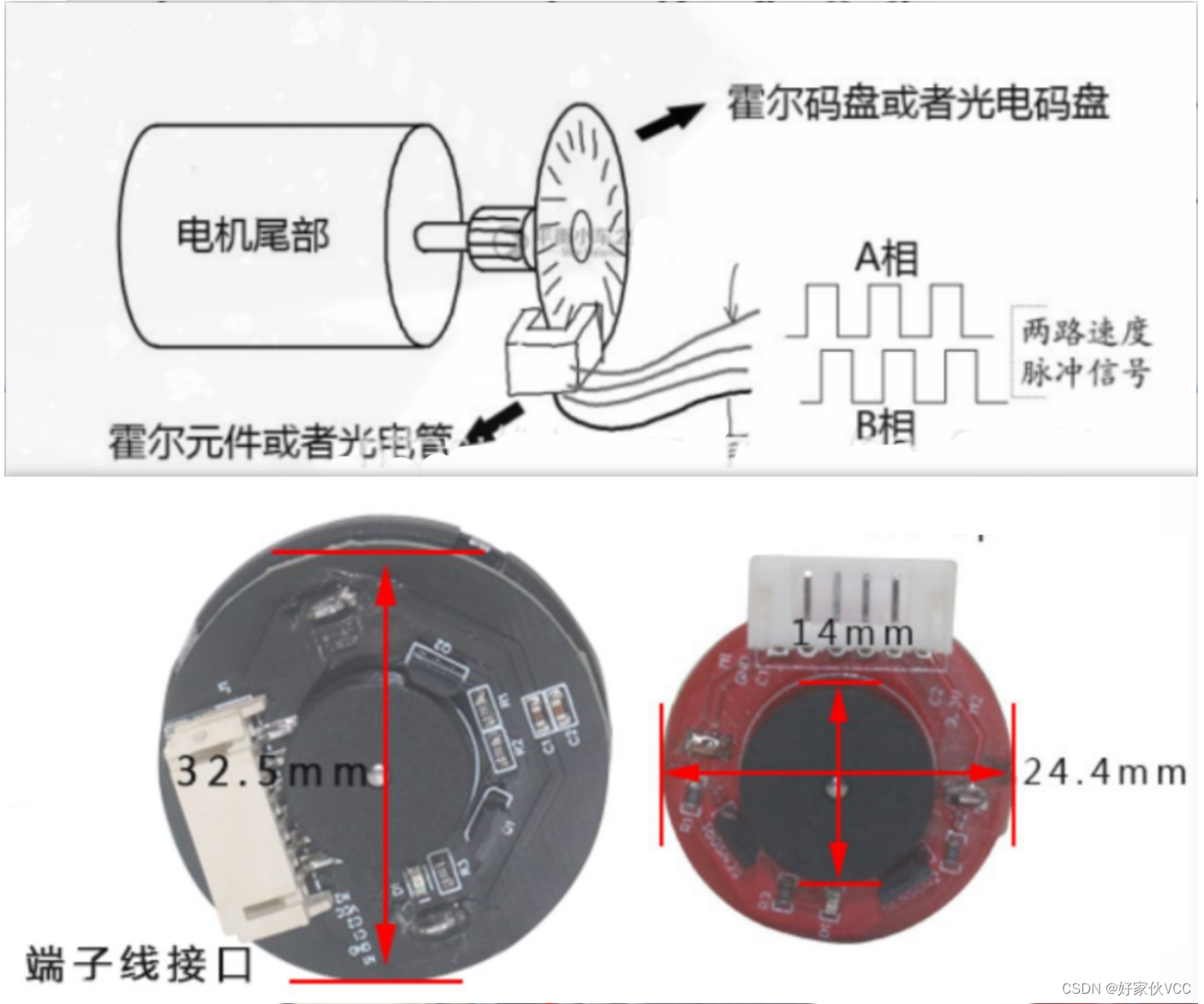
那么编码器的输出信号具体是什么?我们如何根据输出信号测量转速 和方向?
转速: 单位时间测量到的脉冲数量(比如根据每秒测量到多少个脉冲来计算转速)
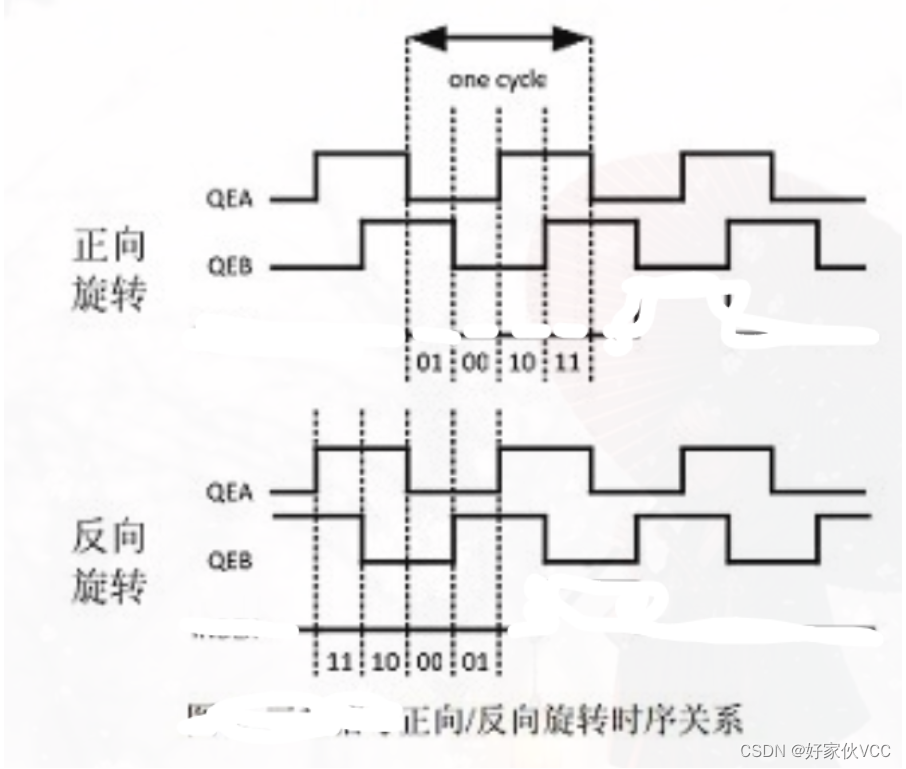
旋转方向: 两通道信号的相对电平关系
7.2单片机定时器的编码器功能
那么我们已经知道编码器输出的波形,我们如何通过单片机读取波形,然后计算出速度那?
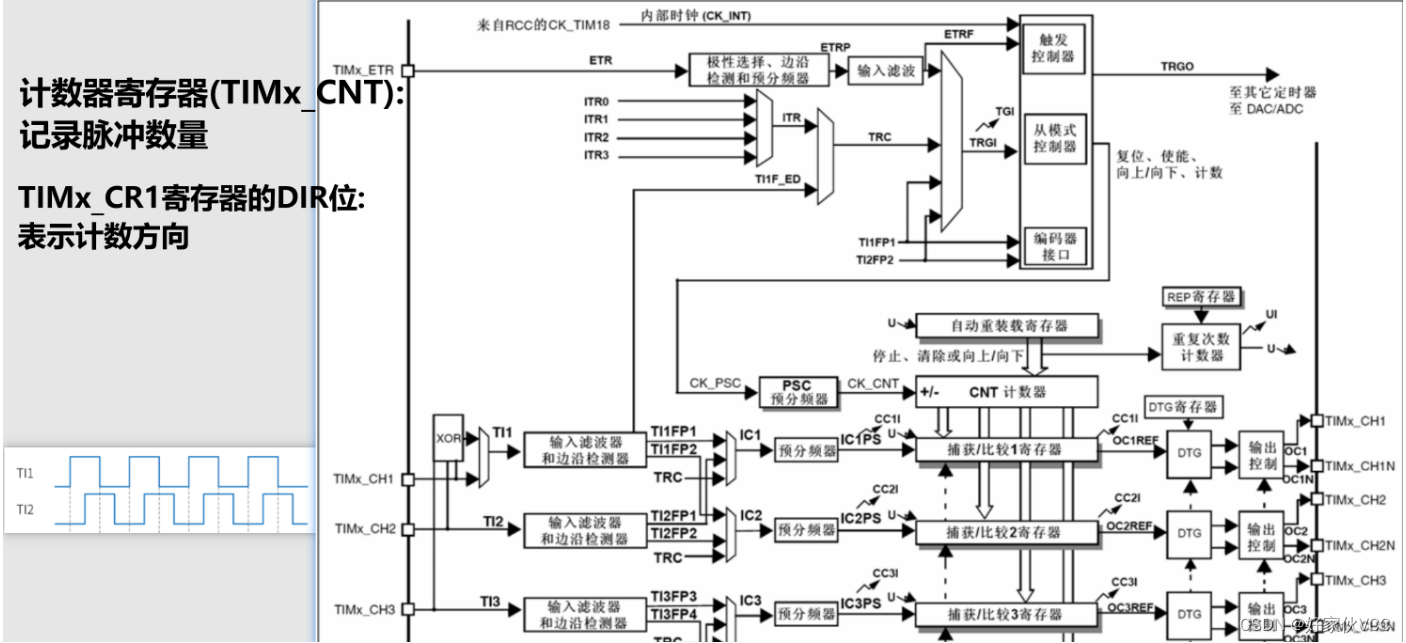
这里STM32单片机的定时器和通用定时器具有编码器接口模式、在STM32中文参考手册13章中有详细介绍
STM32中文参考手册-第200页
STM32中文参考手册-第267页

STM32中文参考手册-第226页
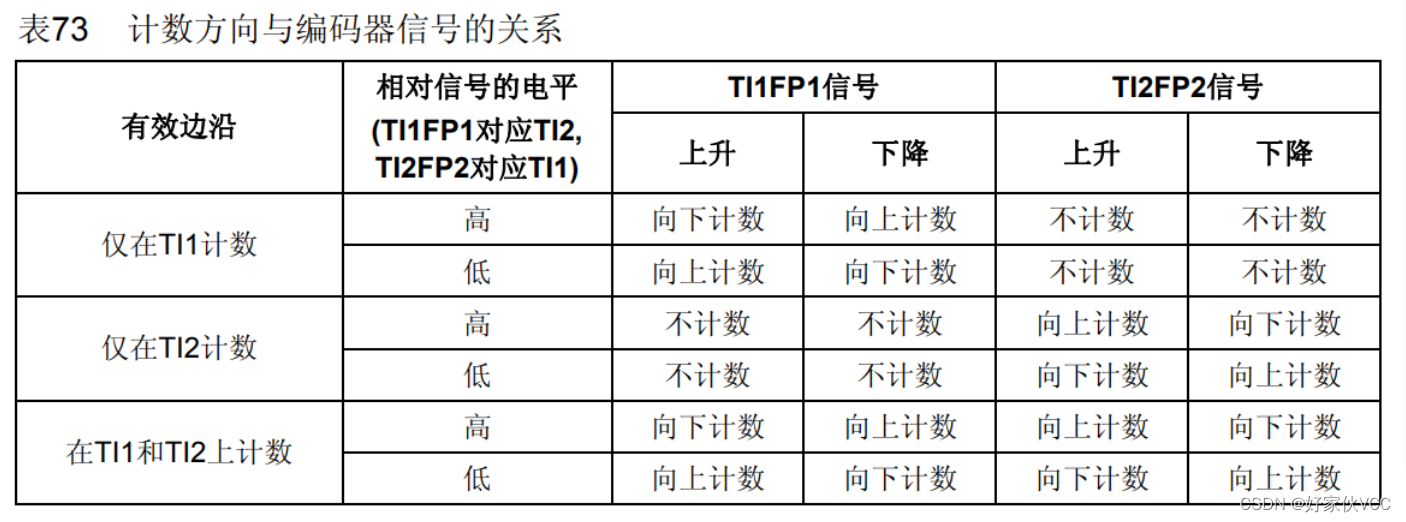
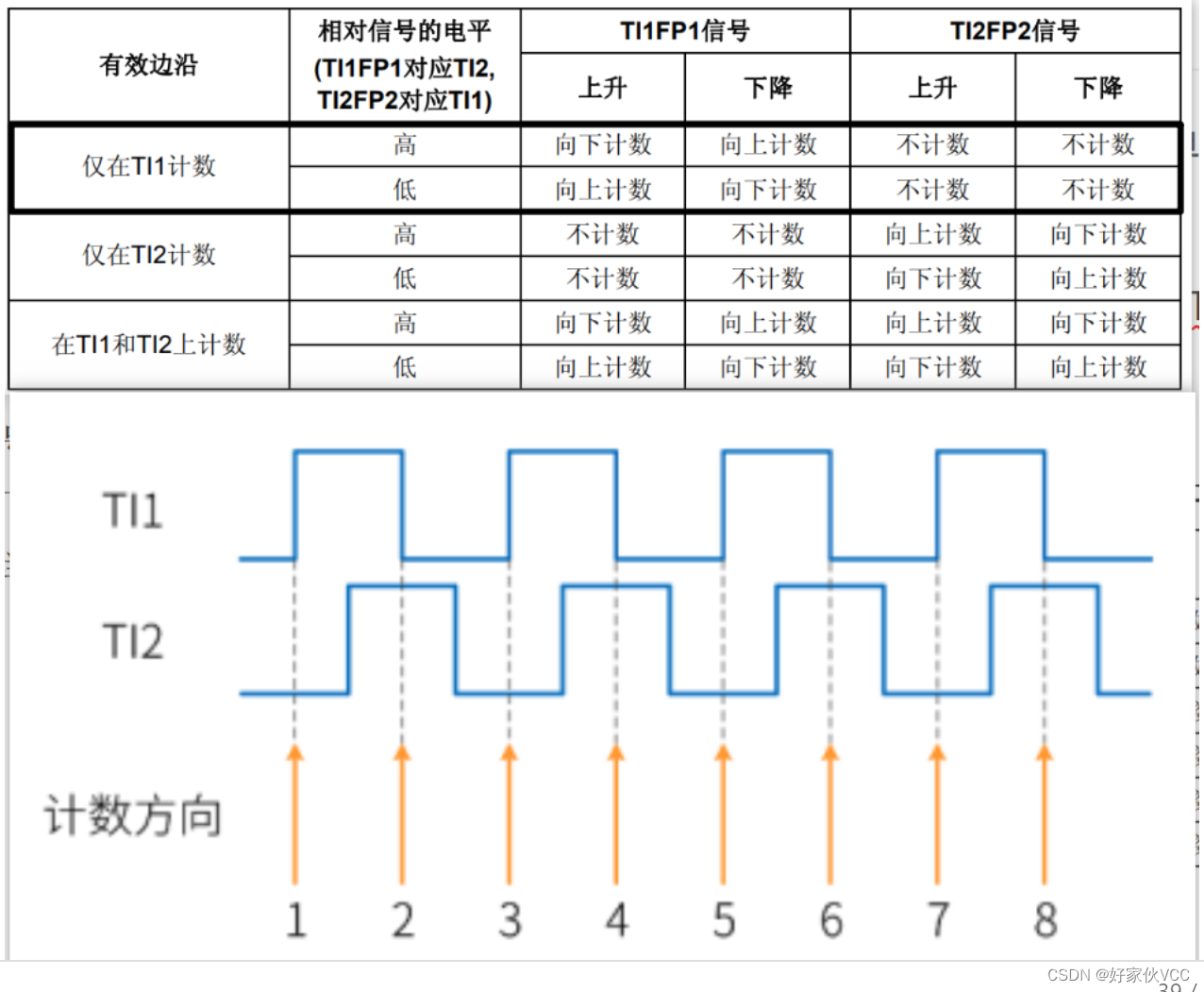
这个是计数方向与编码器信号的关系、我们拆开来看
仅在TI1计数、电机正转、对原始数据二倍频
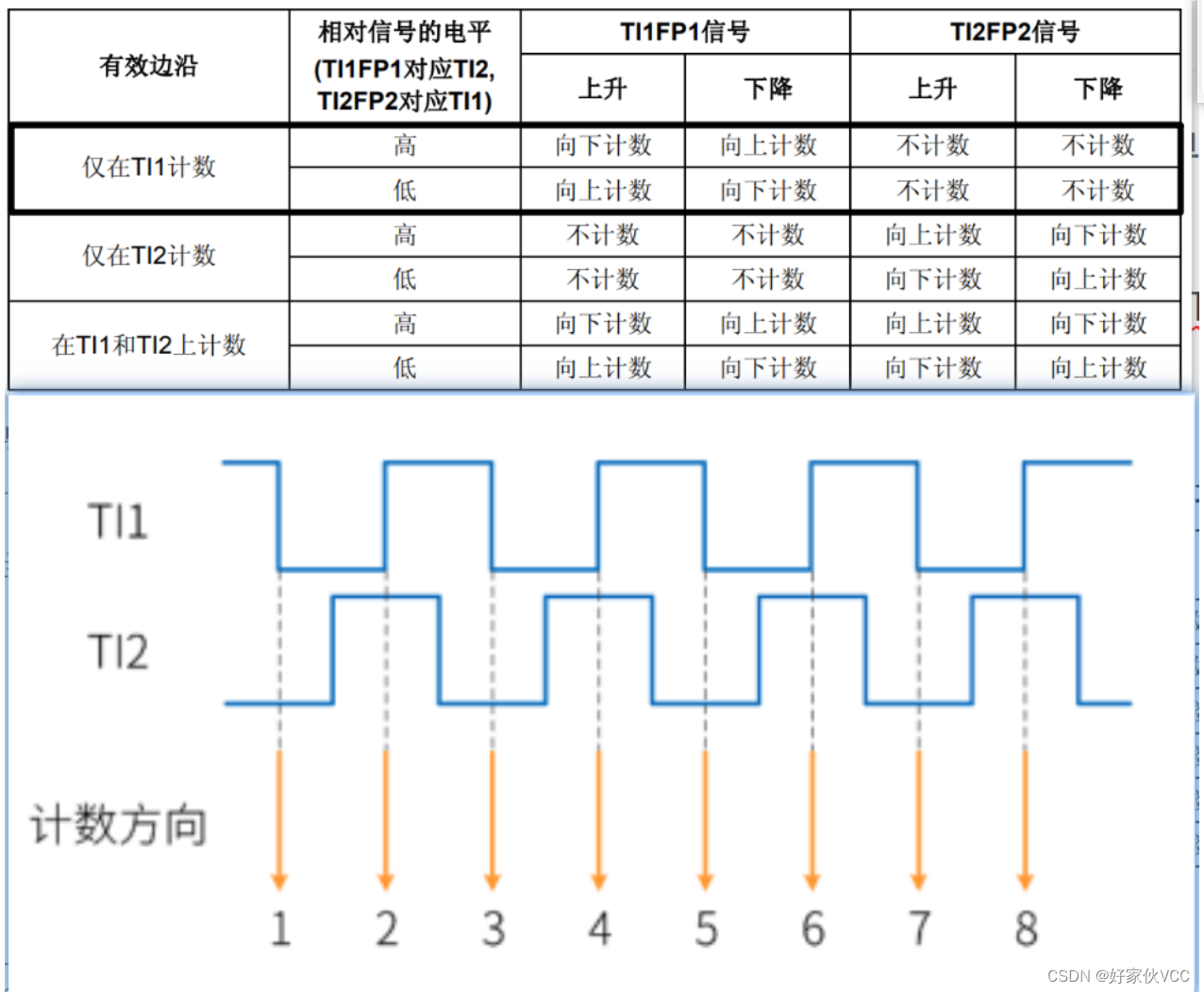
仅在TI1计数、电机反转、对原始数据二倍频
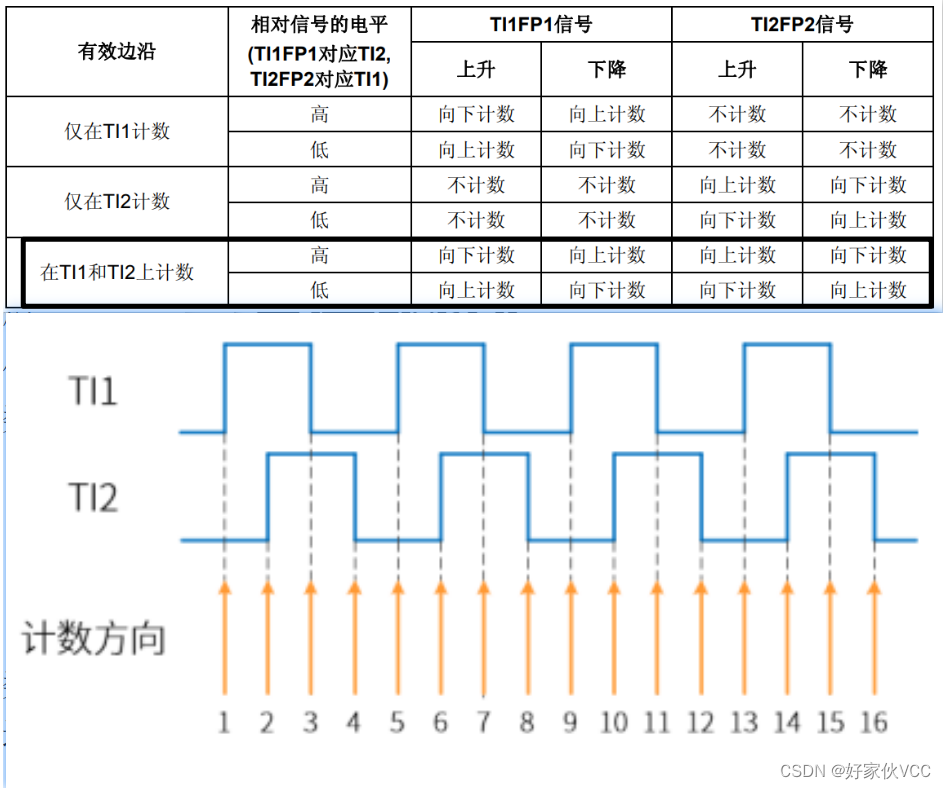
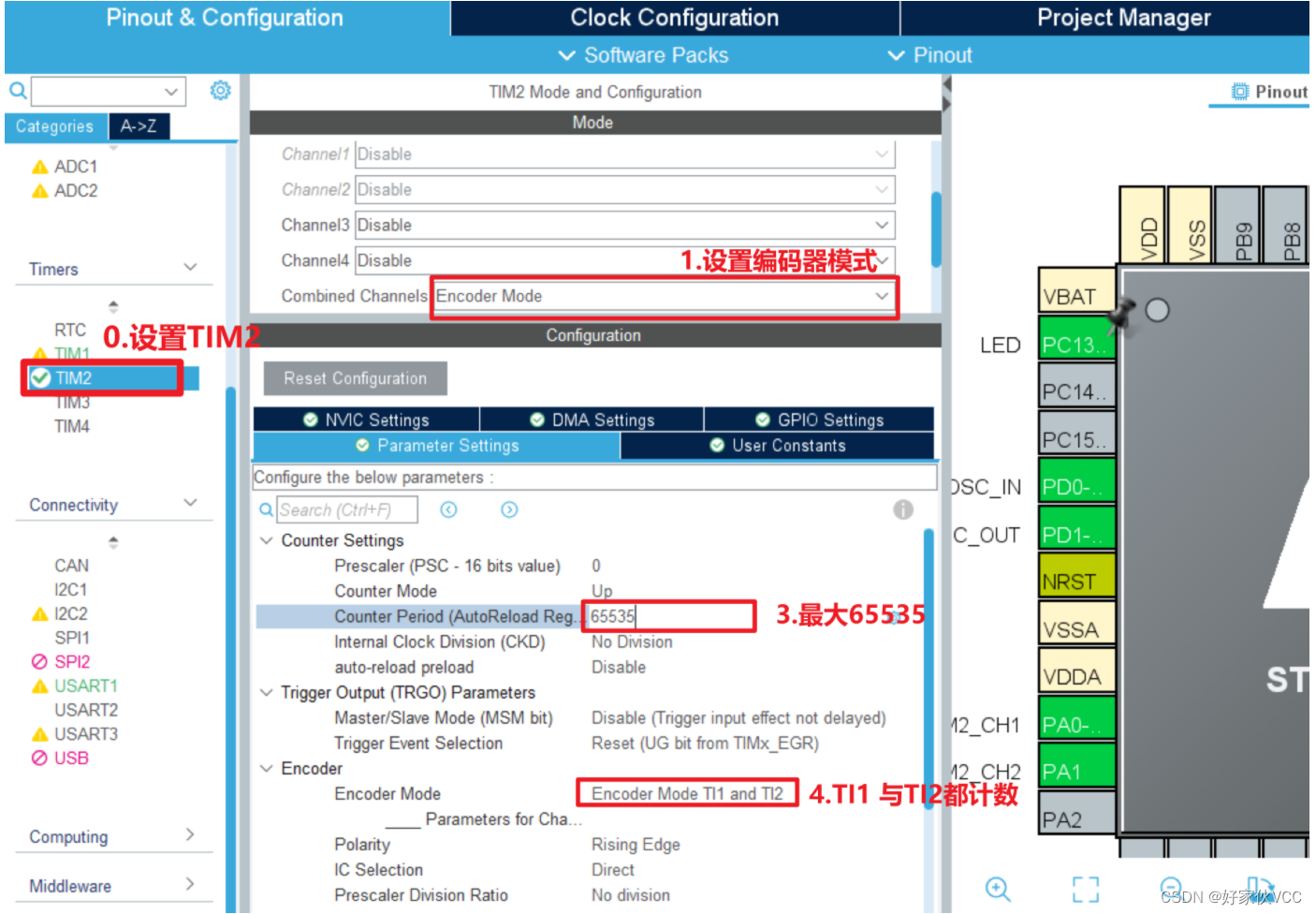
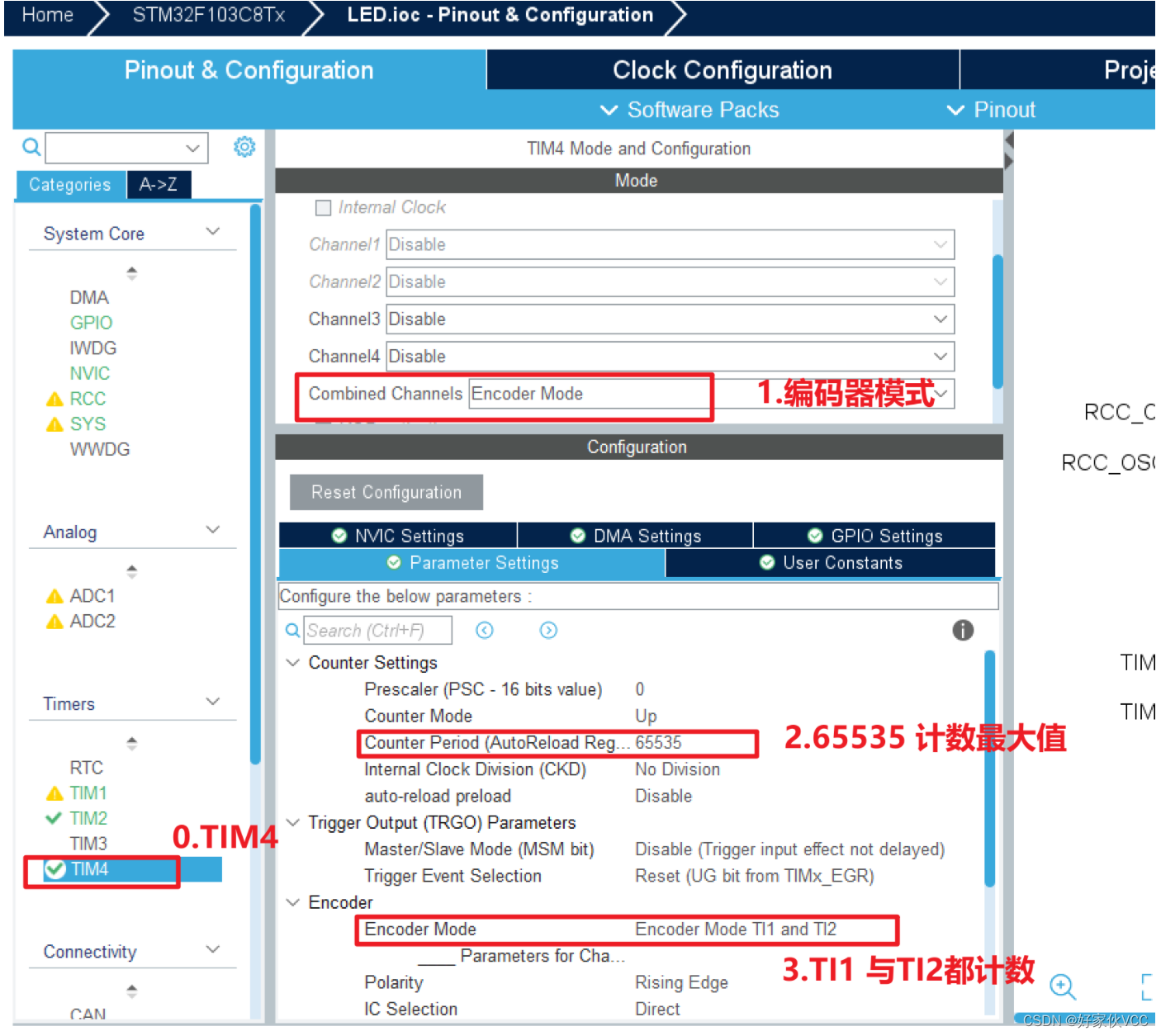
在TI1和TI2都计数
可以看到这样就对原始数据四倍频了
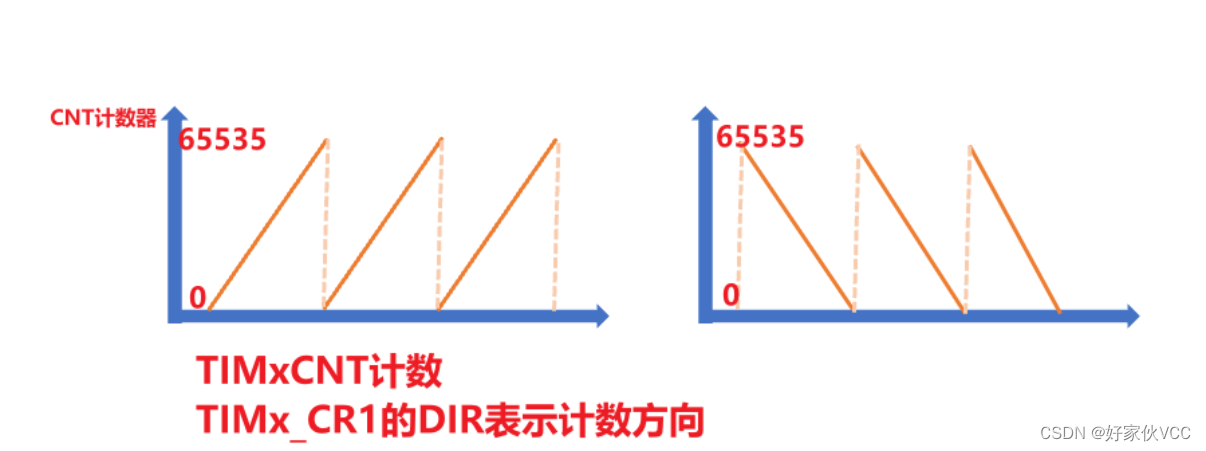
计数方向
7.3-获得单位时间计数器值变化量
上一次说的方法:
这次编码器计数值 = 计数器值+计数溢出次数 * 计数最大器计数最大值
计数器两次变化值 = 这次编码器计数值 - 上次编码器计数值
然后根据这个单位变化量计算速度
还有一种方法:
计数器变化量 = 当前计数器值
每次计数值清空
然后根据这个变化量 计算速度
然后我们再看具体到哪一款电机和编码器上如何测速

在STM32中文参考手册-第119页
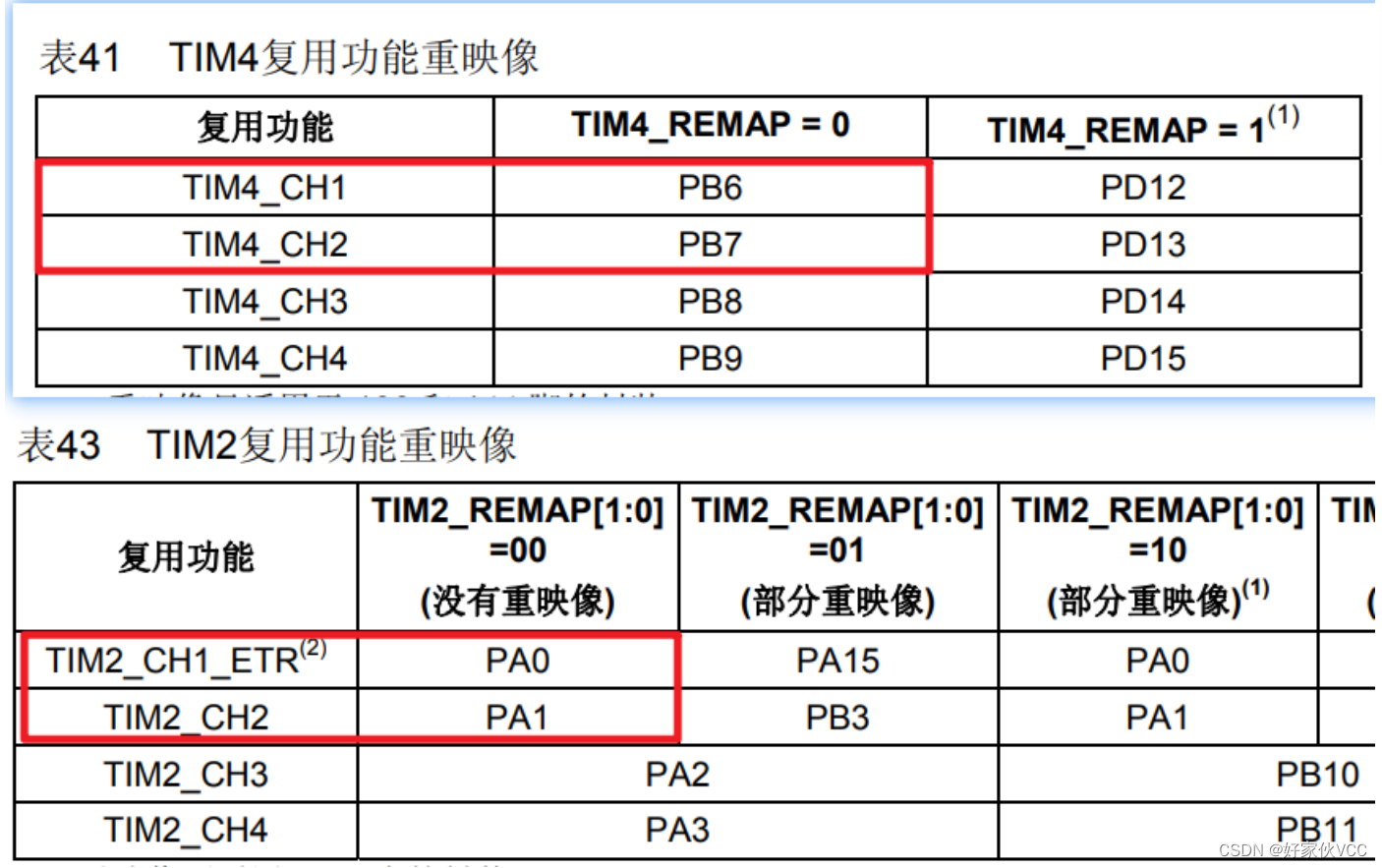
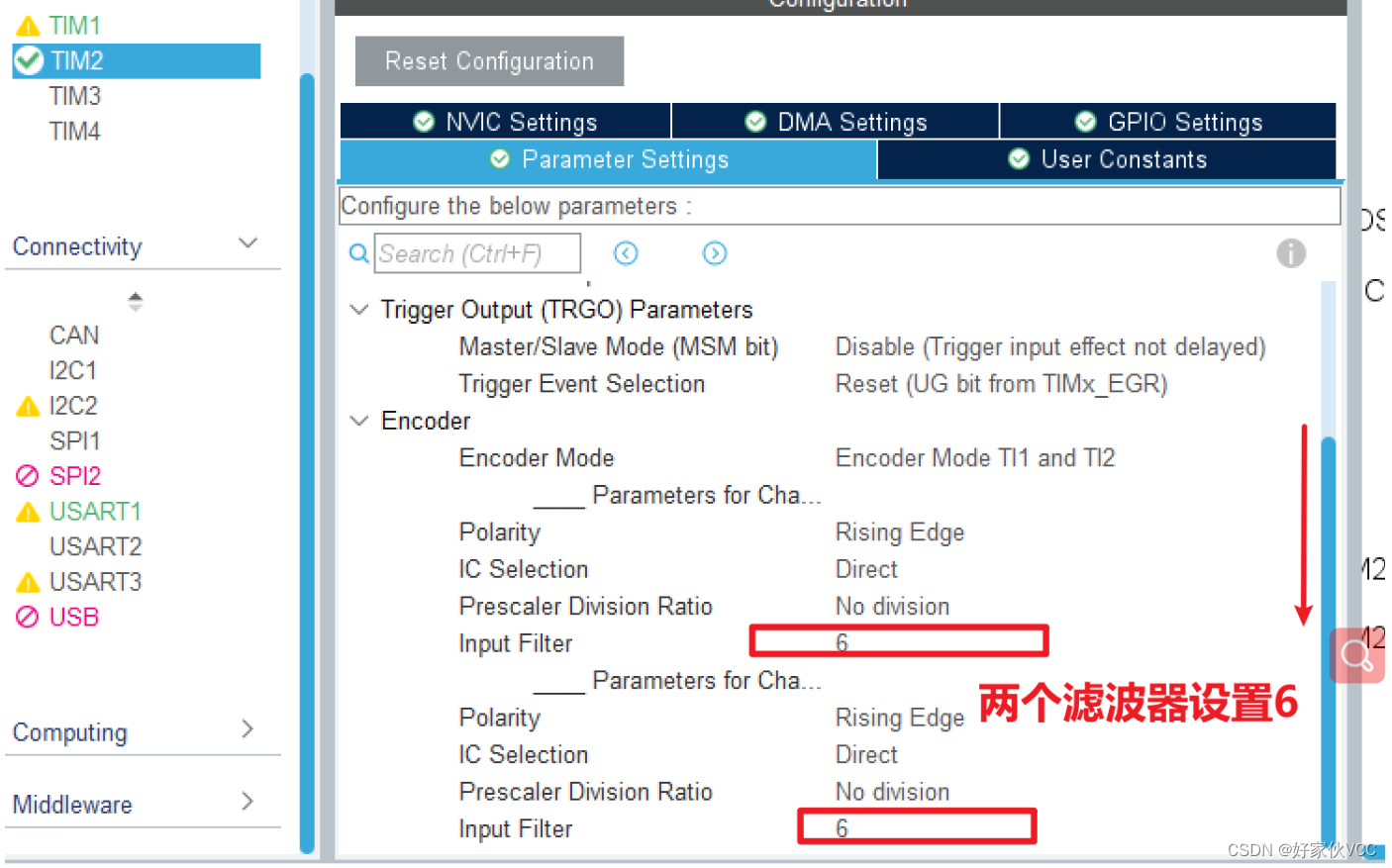
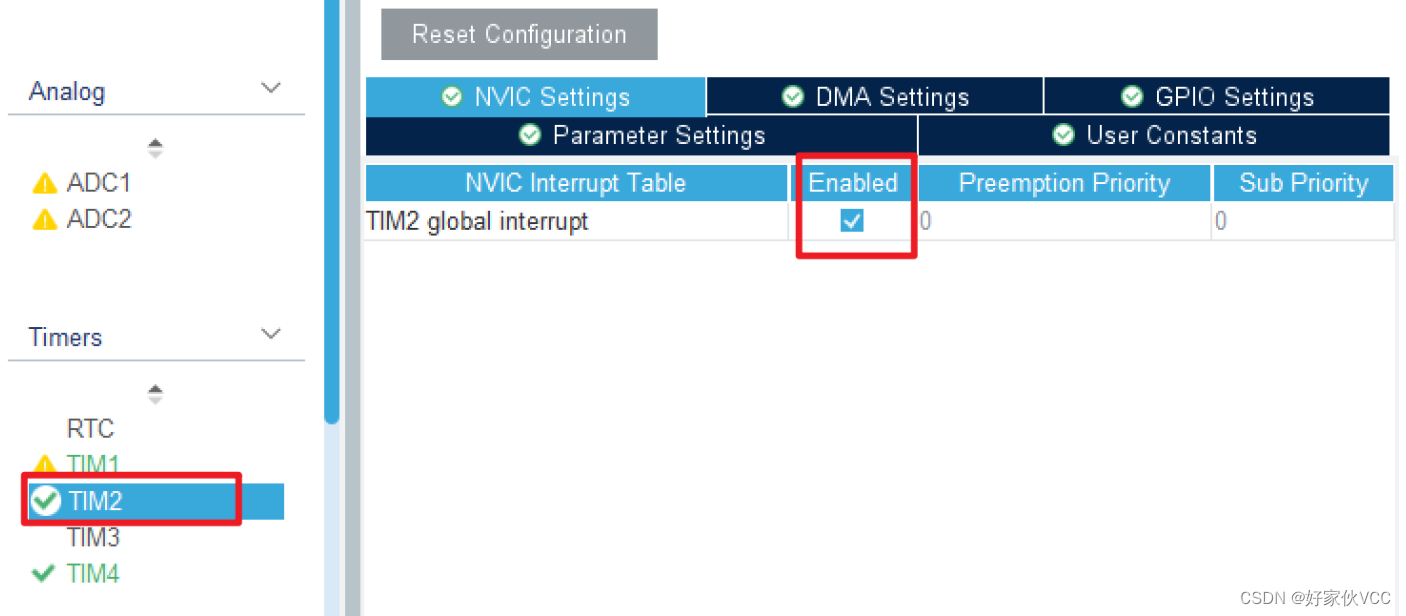
设置TIM2
设置ITM2滤波器
同理设置TIM4
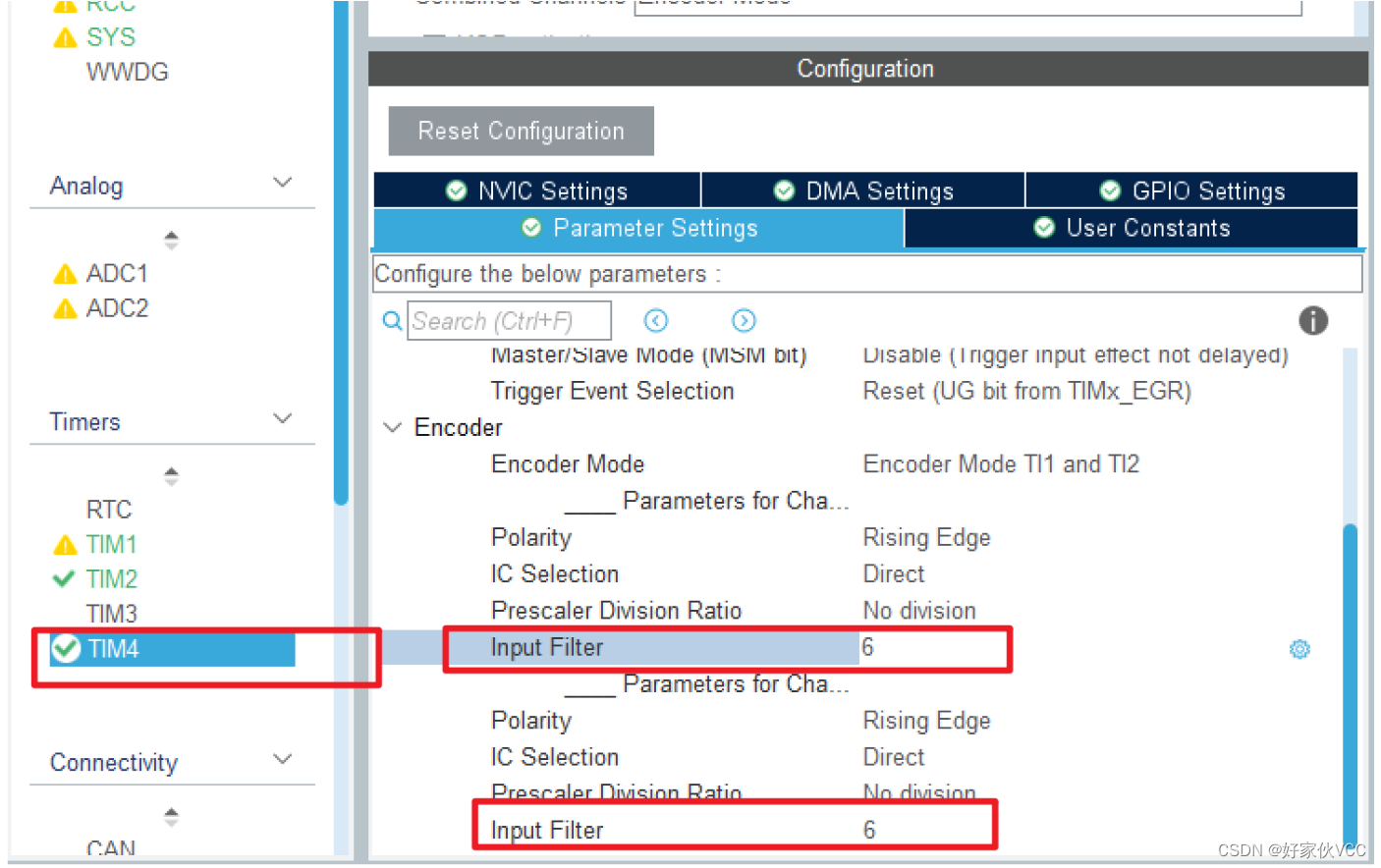
设置TIM4滤波器
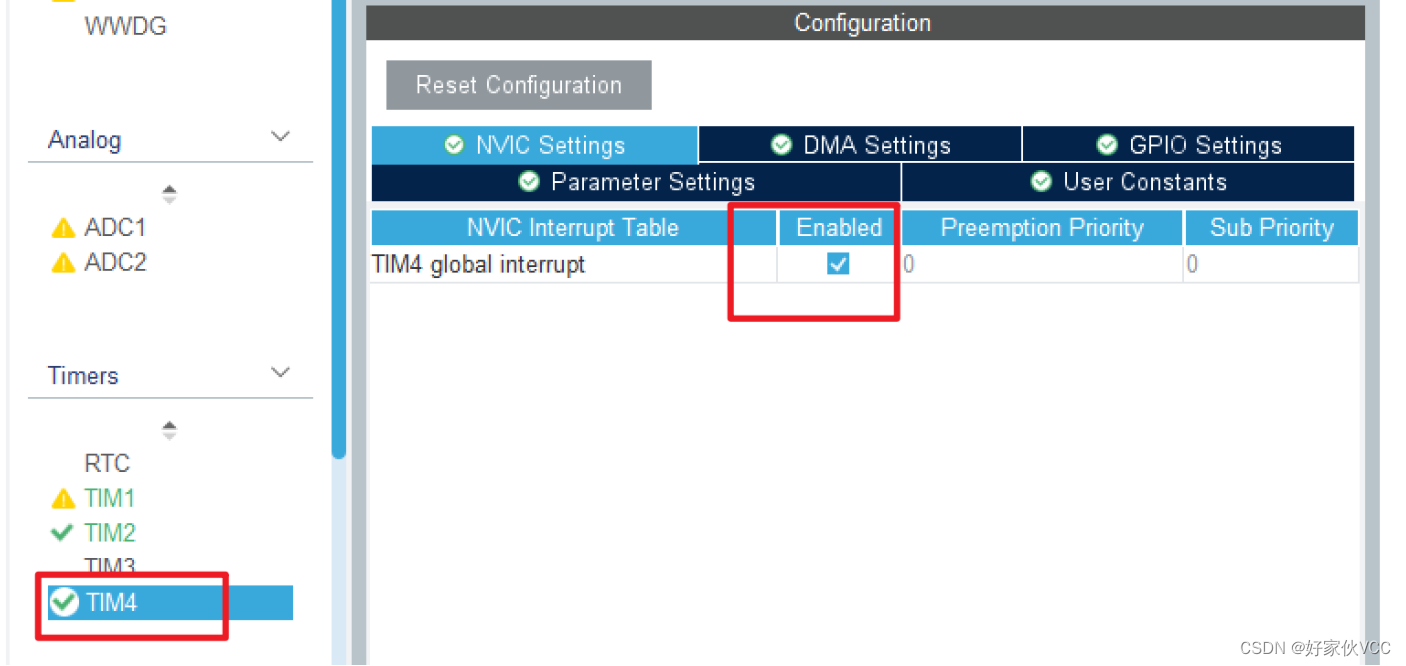
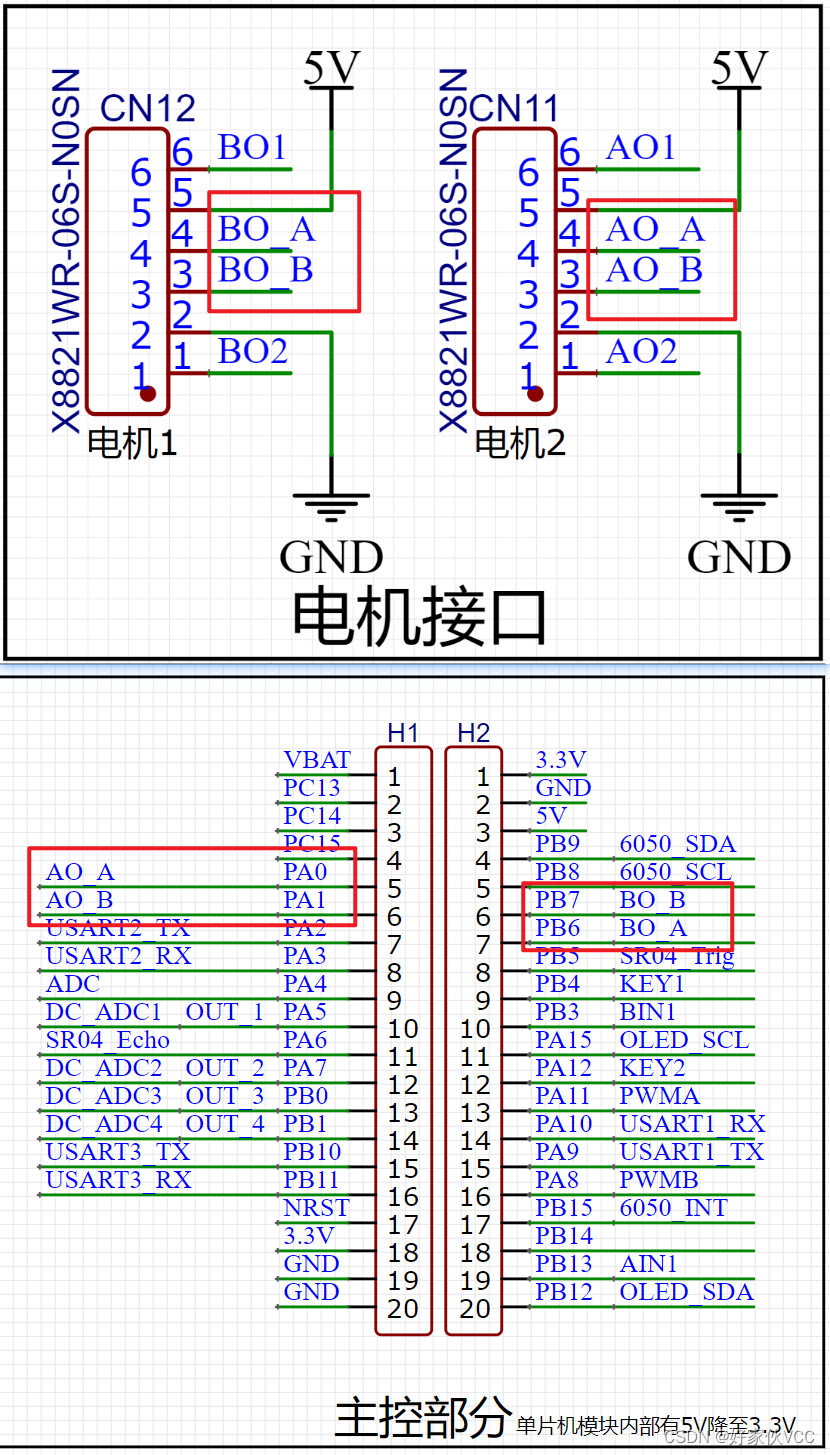
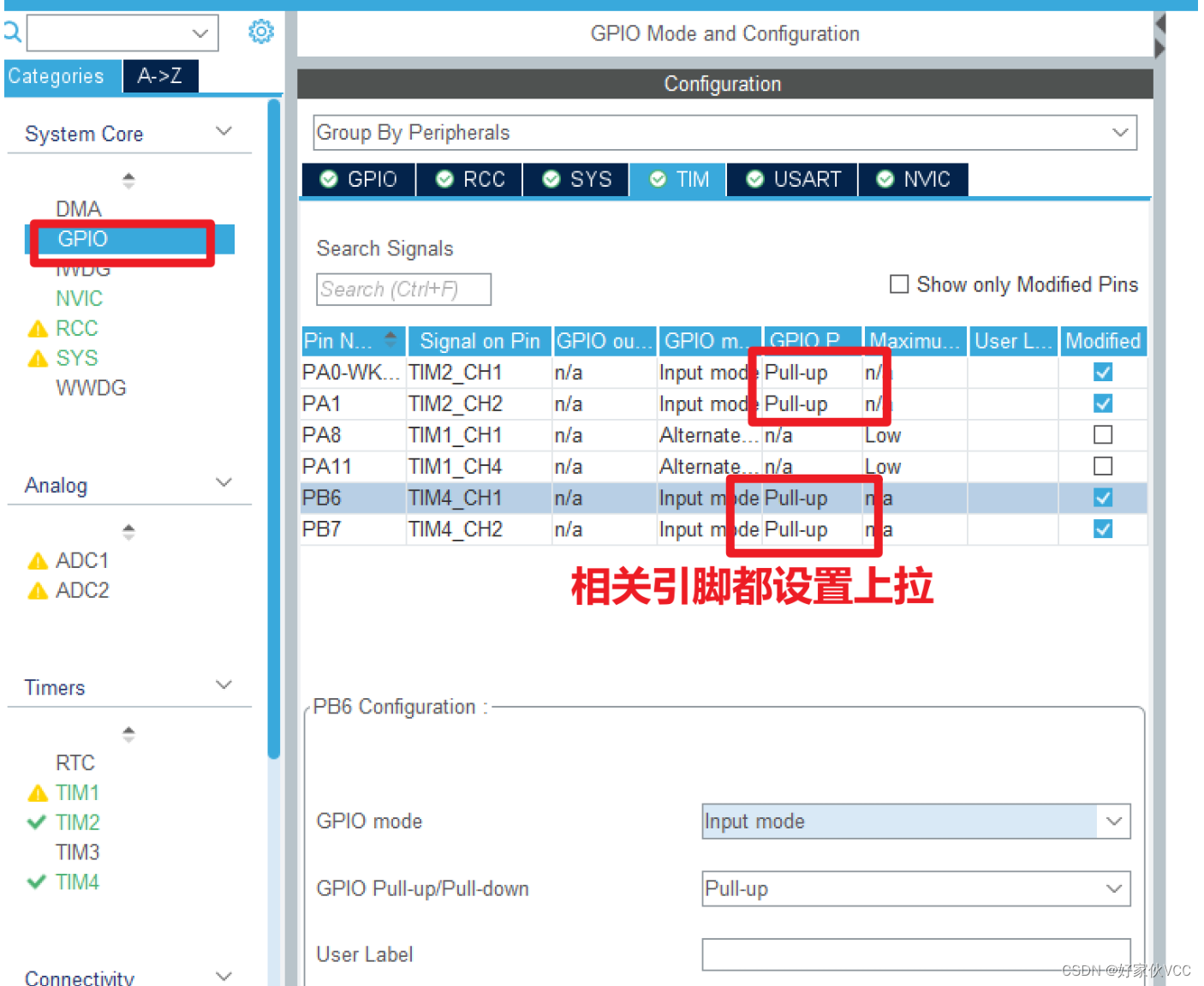
设置引脚上拉
生成代码
开启定时器和定时中断
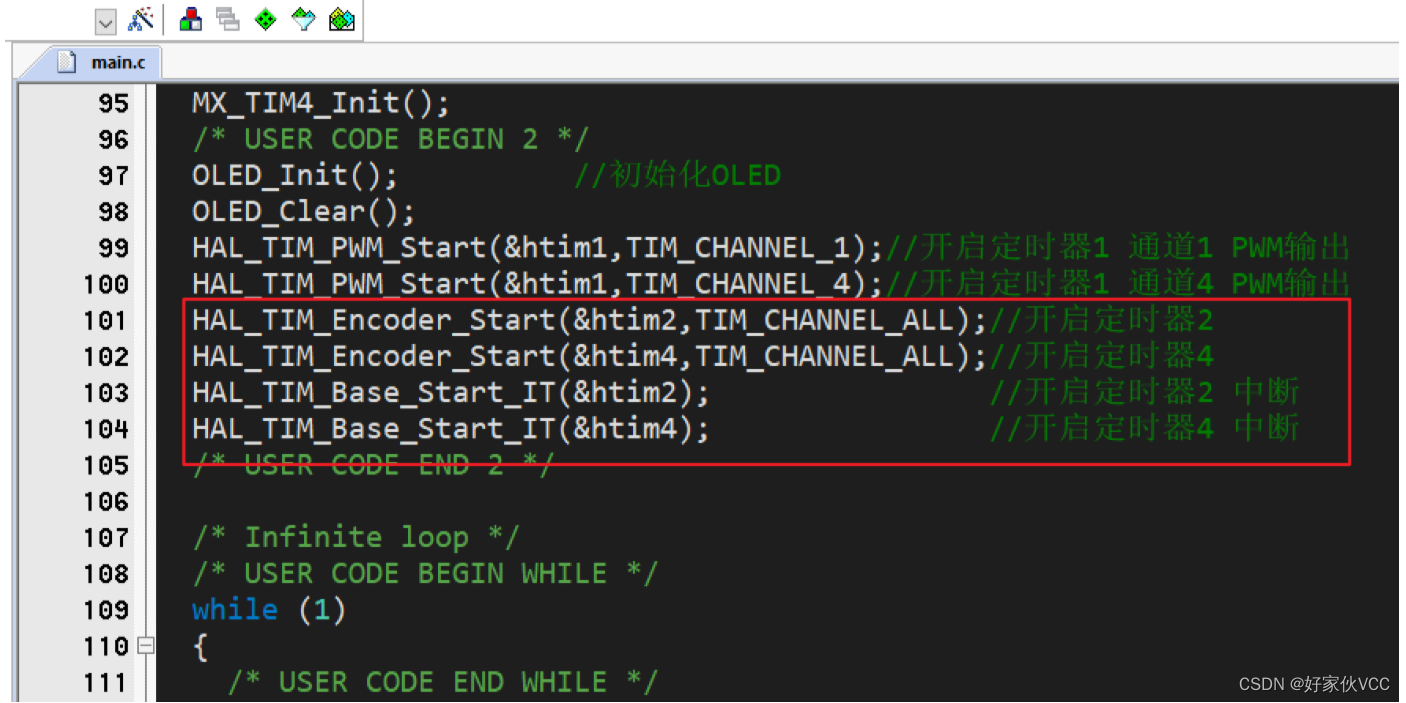
HAL_TIM_Encoder_Start(&htim2,TIM_CHANNEL_ALL);//开启定时器2
HAL_TIM_Encoder_Start(&htim4,TIM_CHANNEL_ALL);//开启定时器4
HAL_TIM_Base_Start_IT(&htim2); //开启定时器2 中断
HAL_TIM_Base_Start_IT(&htim4); //开启定时器4 中断
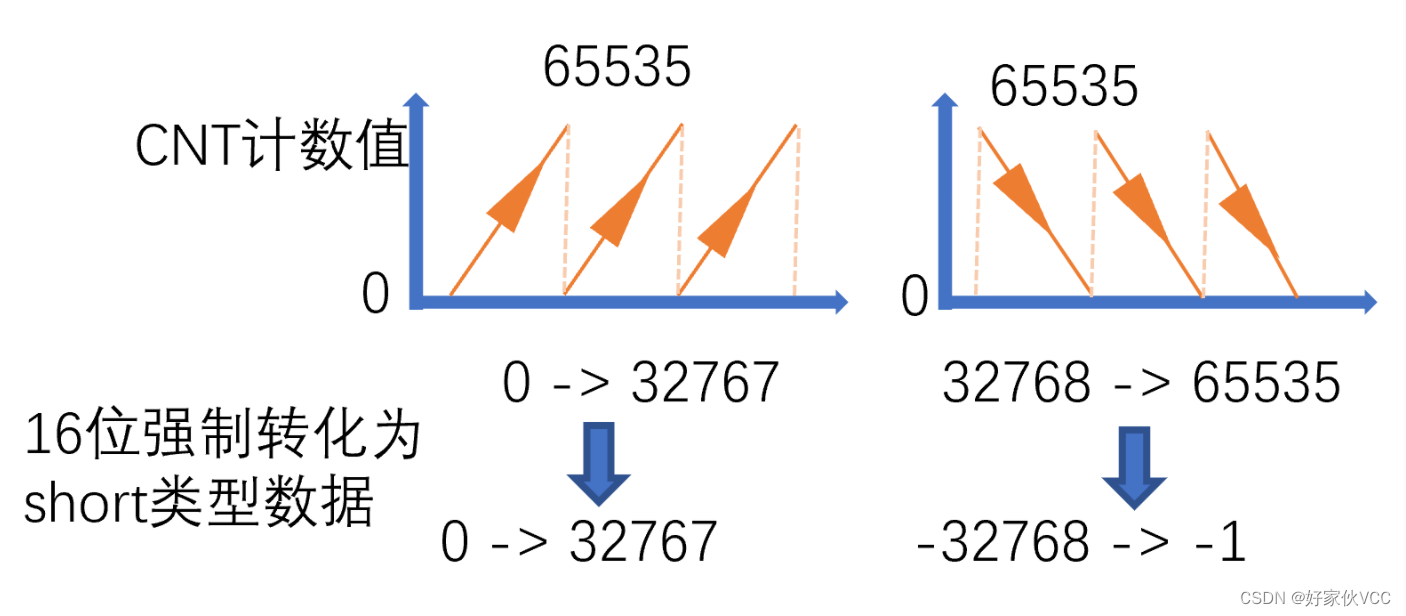
在定义两个变量保存计数器值
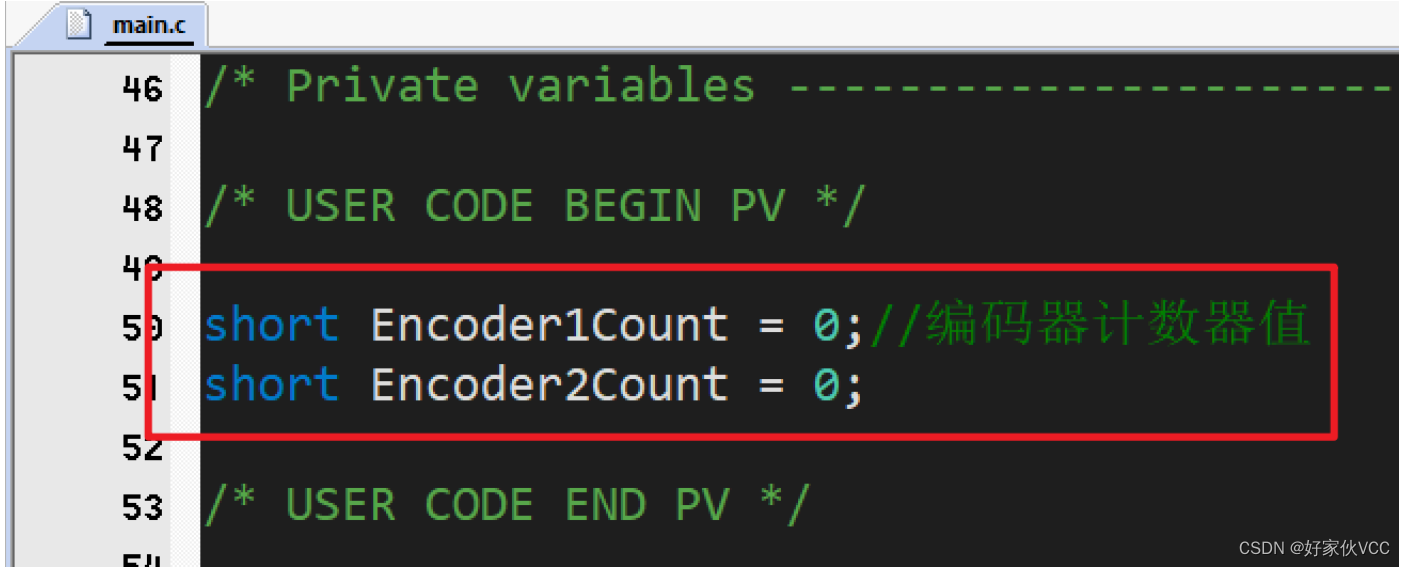
short Encoder1Count = 0;//编码器计数器值
short Encoder2Count = 0;
每2ms读取计数器值->清零计数器
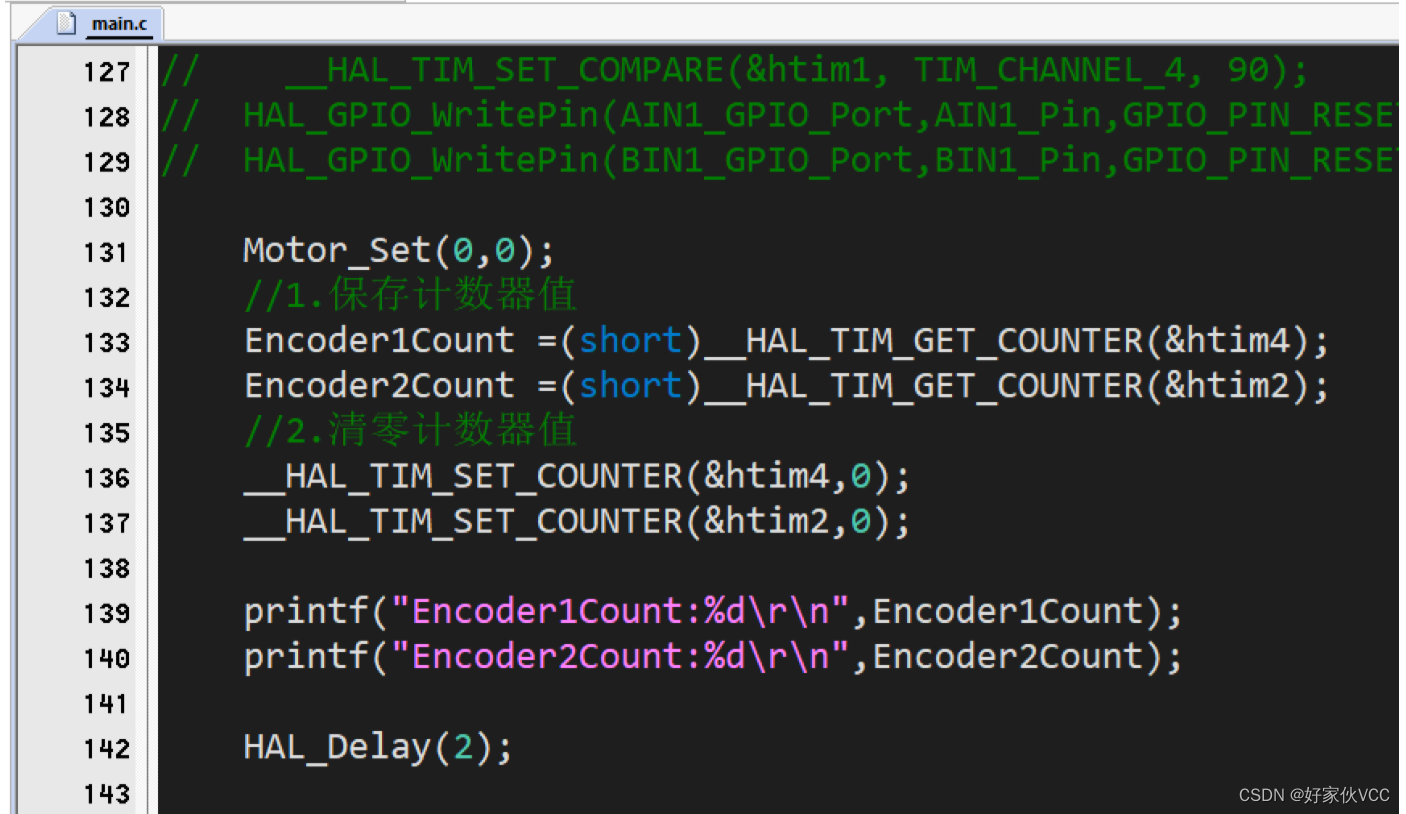
Motor_Set(0,0);
//1.保存计数器值
Encoder1Count =(short)__HAL_TIM_GET_COUNTER(&htim4);
Encoder2Count =(short)__HAL_TIM_GET_COUNTER(&htim2);
//2.清零计数器值
__HAL_TIM_SET_COUNTER(&htim4,0);
__HAL_TIM_SET_COUNTER(&htim2,0);
printf("Encoder1Count:%d\r\n",Encoder1Count);
printf("Encoder2Count:%d\r\n",Encoder2Count);
HAL_Delay(2);
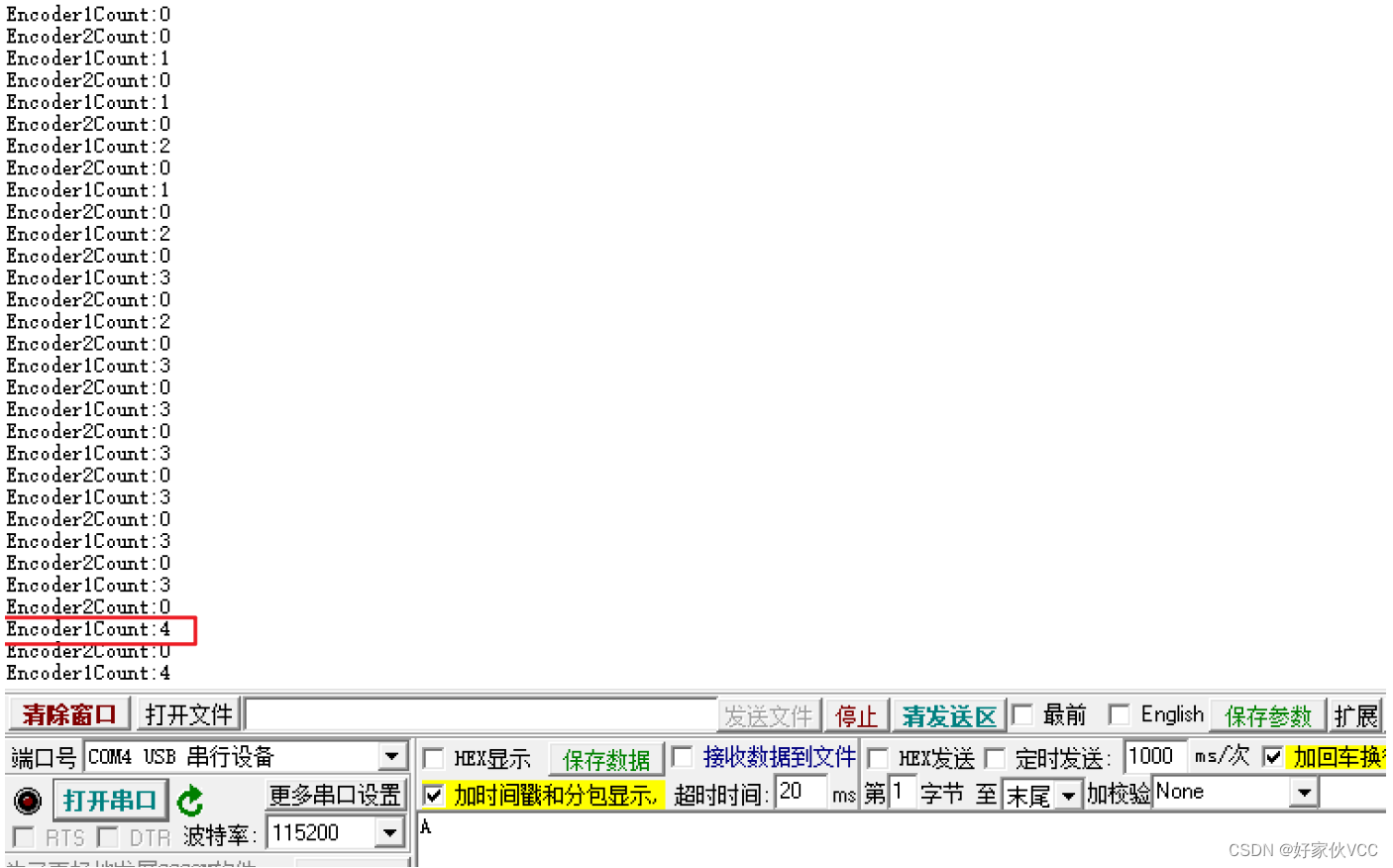
接好电池、烧录代码、串口一连接电脑
用手转动电机1或者电机2 、串口助手可以看到输出信息了
7.4-主函数周期测量转速
上面我们测量出来了溢出值,我们再根据当前计数器值就可以测量出计数器变化量,我们通过单位时间变量就可以计算出转速
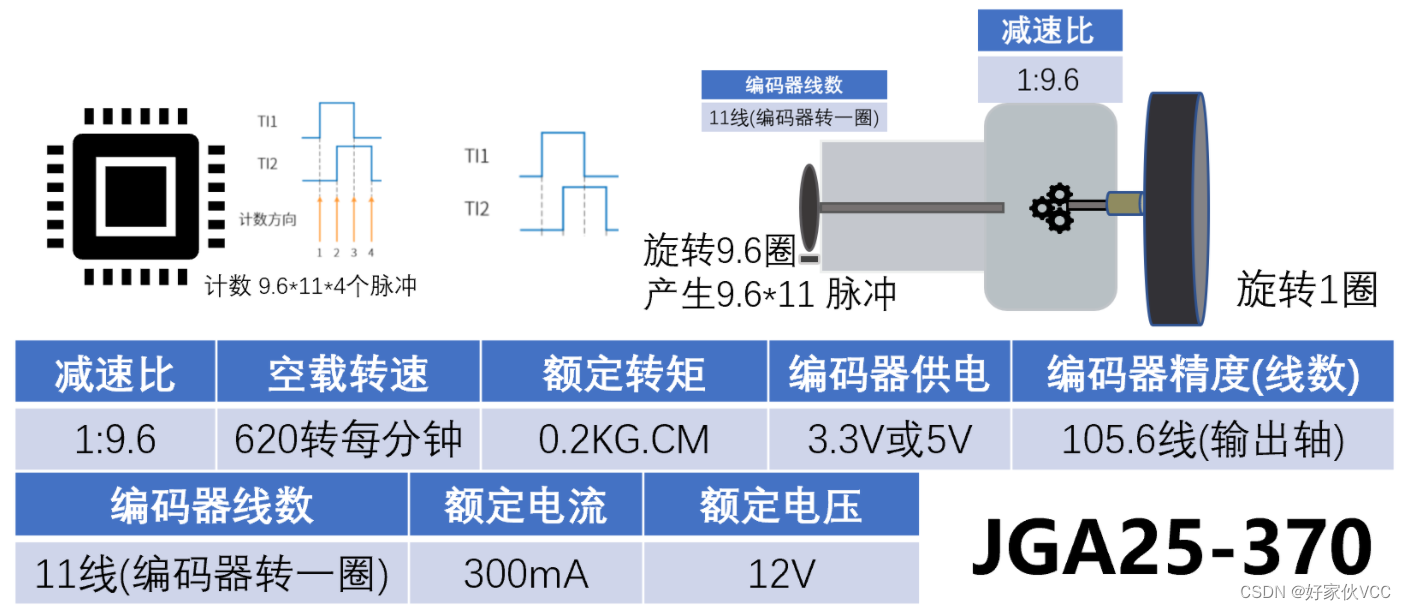
下面是电机和编码器的参数
我们先测试的结论是否有问题?
- 编码器计数器会不会在计数时间内溢出?
- 车轮旋转一周,单片机编码器计数器计数多少?9.6乘11乘4
- 根据计算方法计算电机转速
定义两个float变量
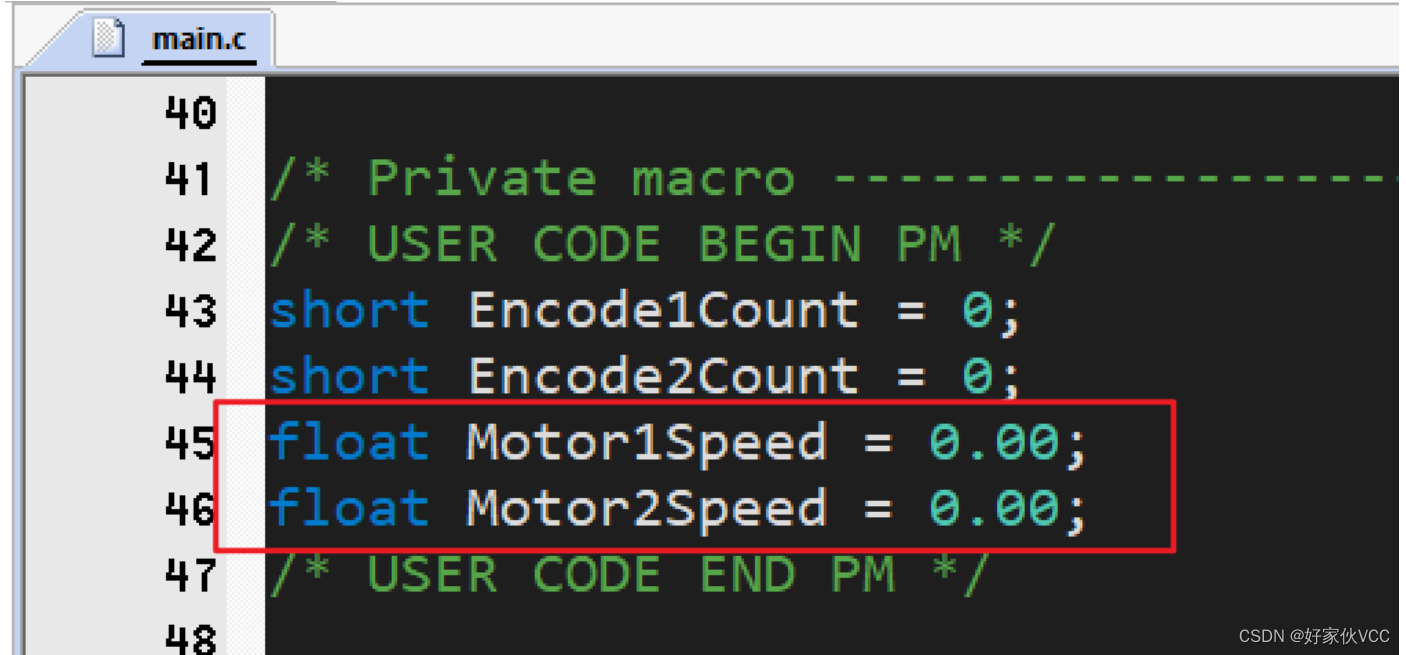
float Motor1Speed = 0.00;
float Motor2Speed = 0.00;
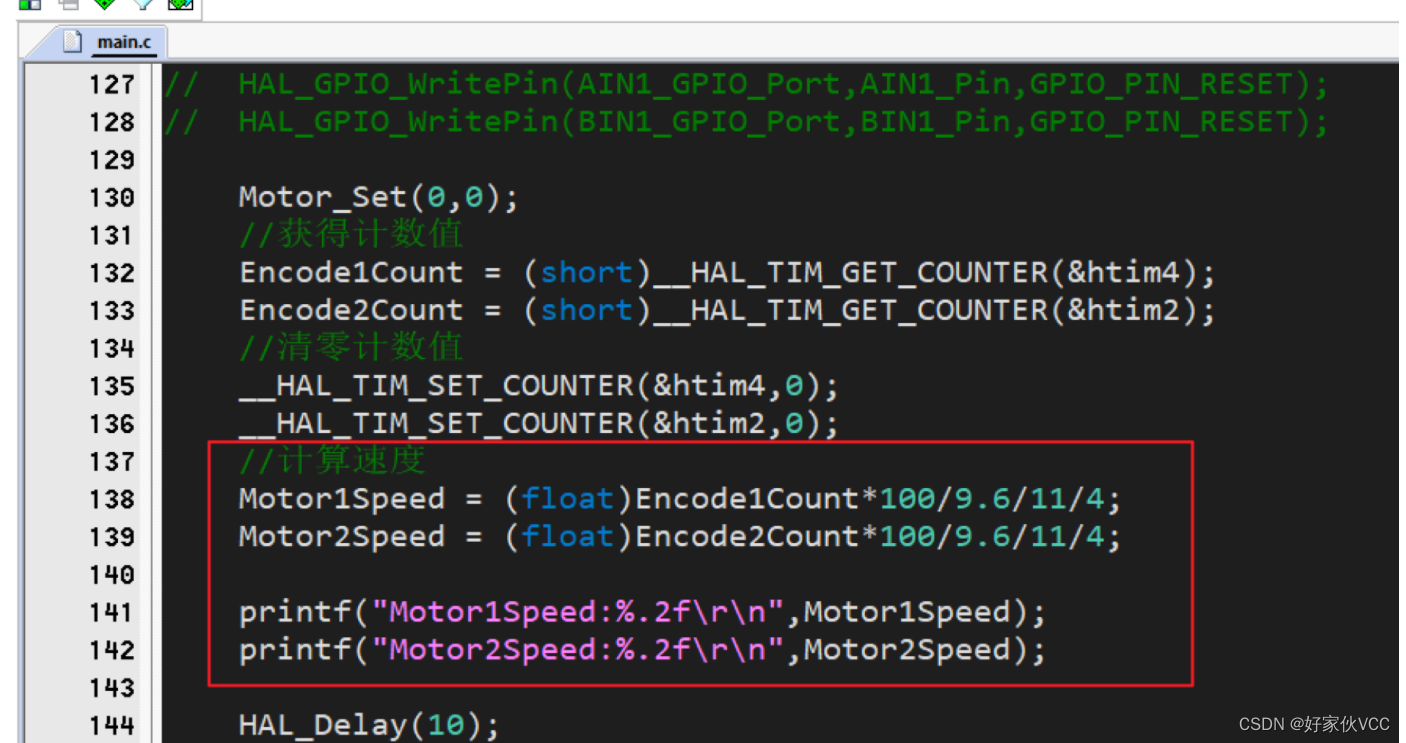
下面是代码(一定要把主函数没有用的删除掉)
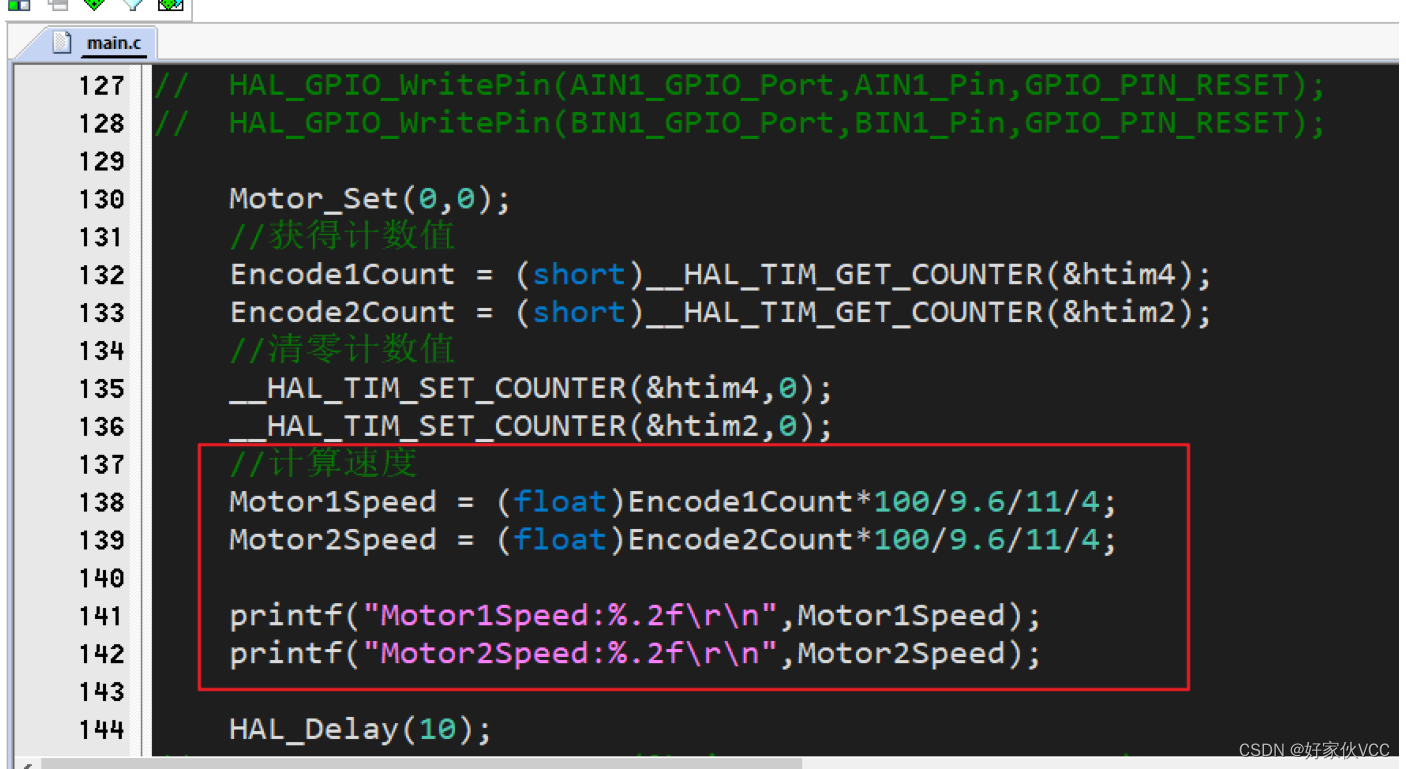
//计算速度
Motor1Speed = (float)Encode1Count*100/9.6/11/4;
Motor2Speed = (float)Encode2Count*100/9.6/11/4;
printf("Motor1Speed:%.2f\r\n",Motor1Speed);
printf("Motor2Speed:%.2f\r\n",Motor2Speed);
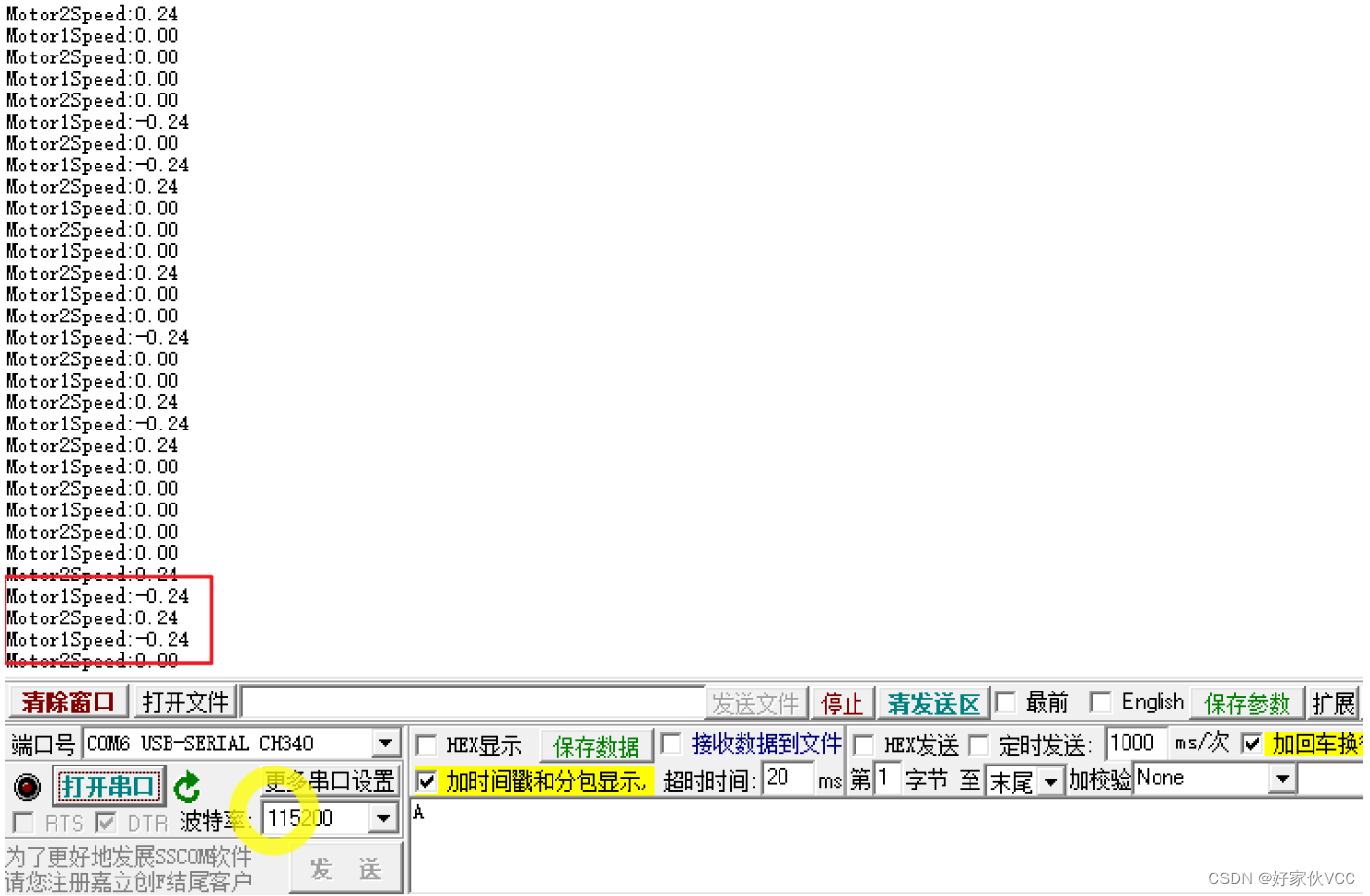
编译烧录代码就会输出结果
7.5-定时器中断定时测量速度
上面我们实现:在主函数周期,读取计数器值然后计算速度,但是如果函数加入其他内容这个周期时间就很难保证。
所以这节我们通过定时器,周期读取计数器,计算速度。复制一份工程开始搞!
我们先开启定时器、2ms进入一次定时器中断,中断回调函数执行咱们的代码即可。
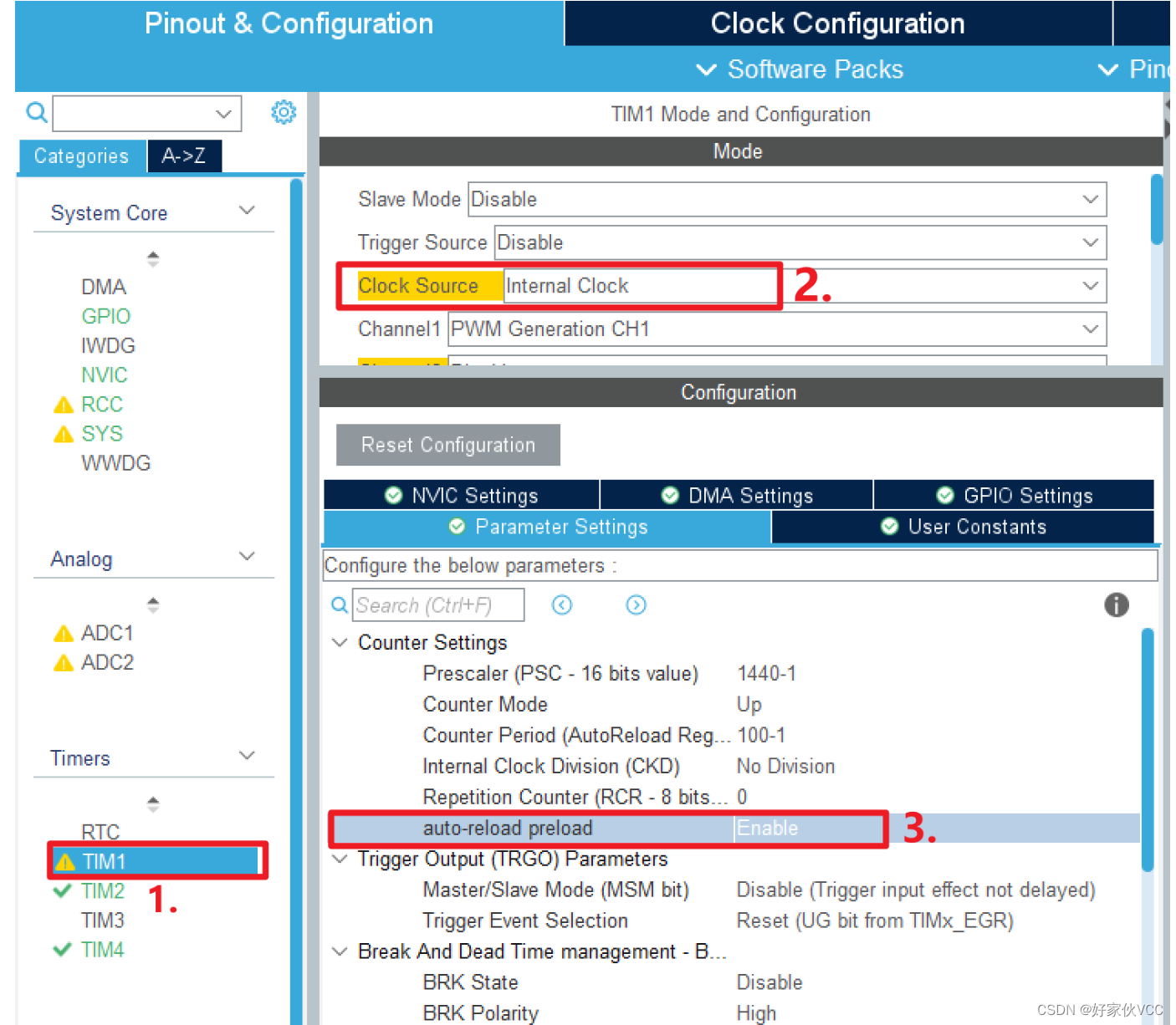
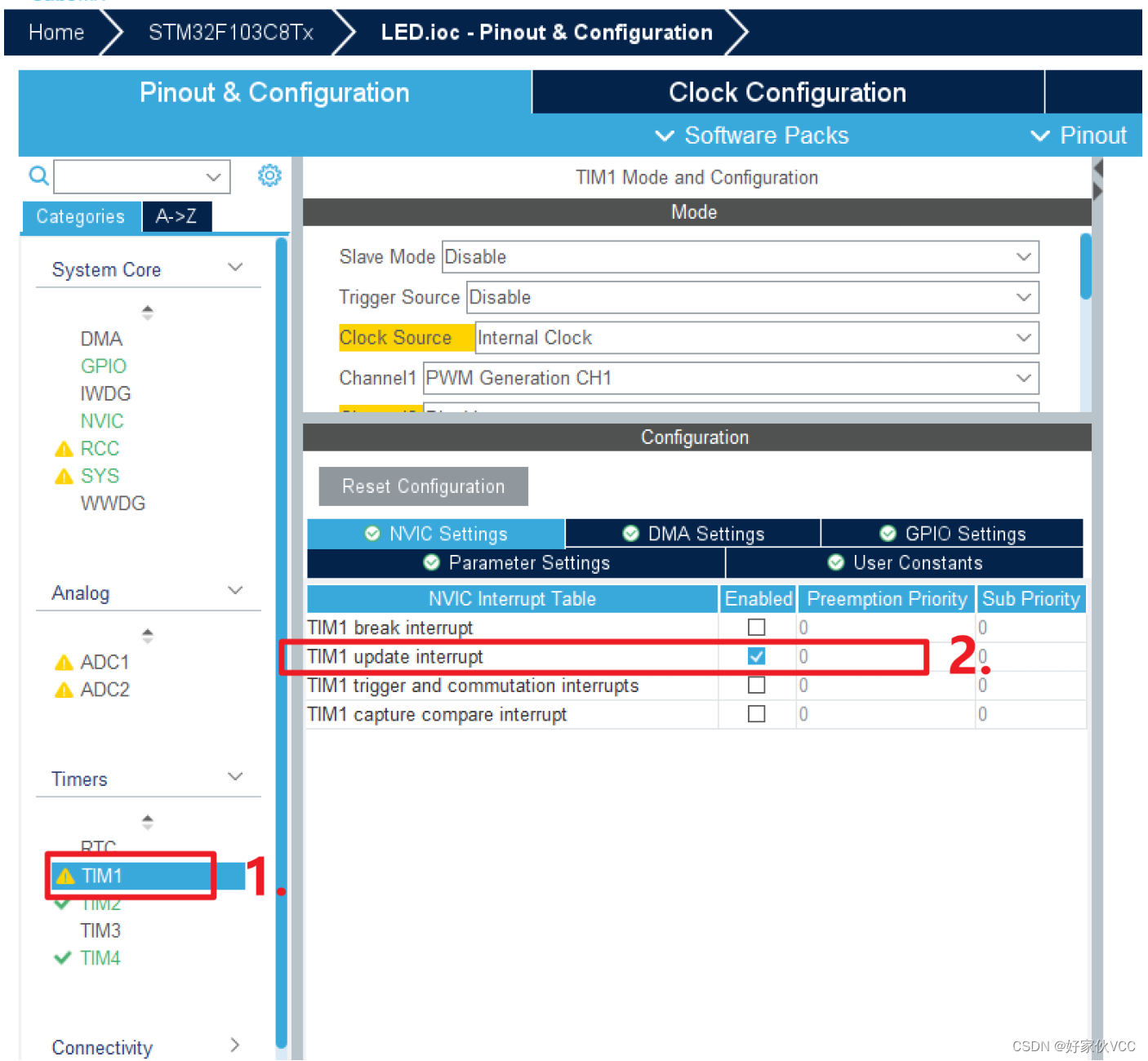
为什么充分利用单片机 我们使用TIM1
- 设置内部时钟源
- 使能自动重装载
开启定义更新中断
代码开启定时器1 中断
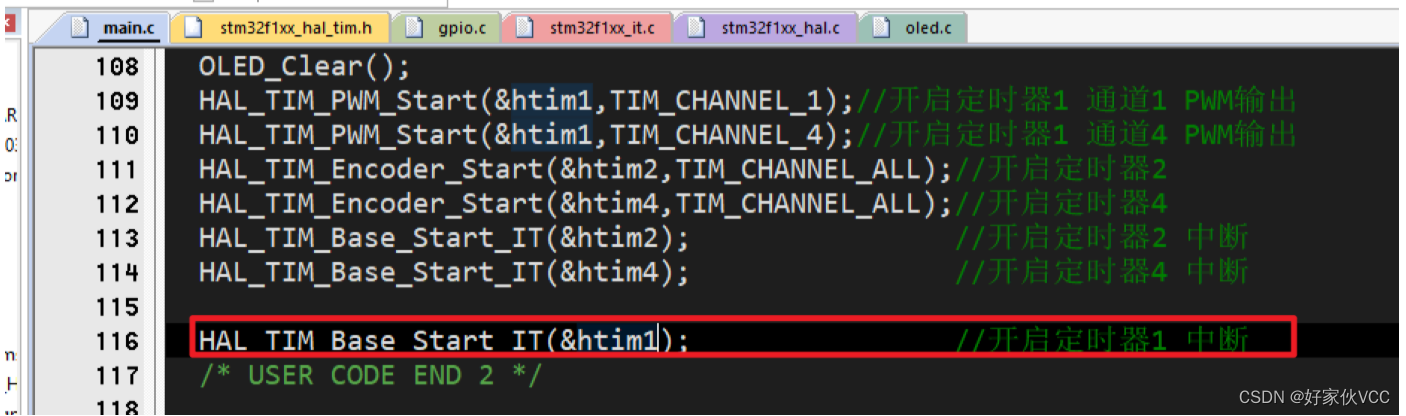
HAL_TIM_Base_Start_IT(&htim1); //开启定时器1 中断
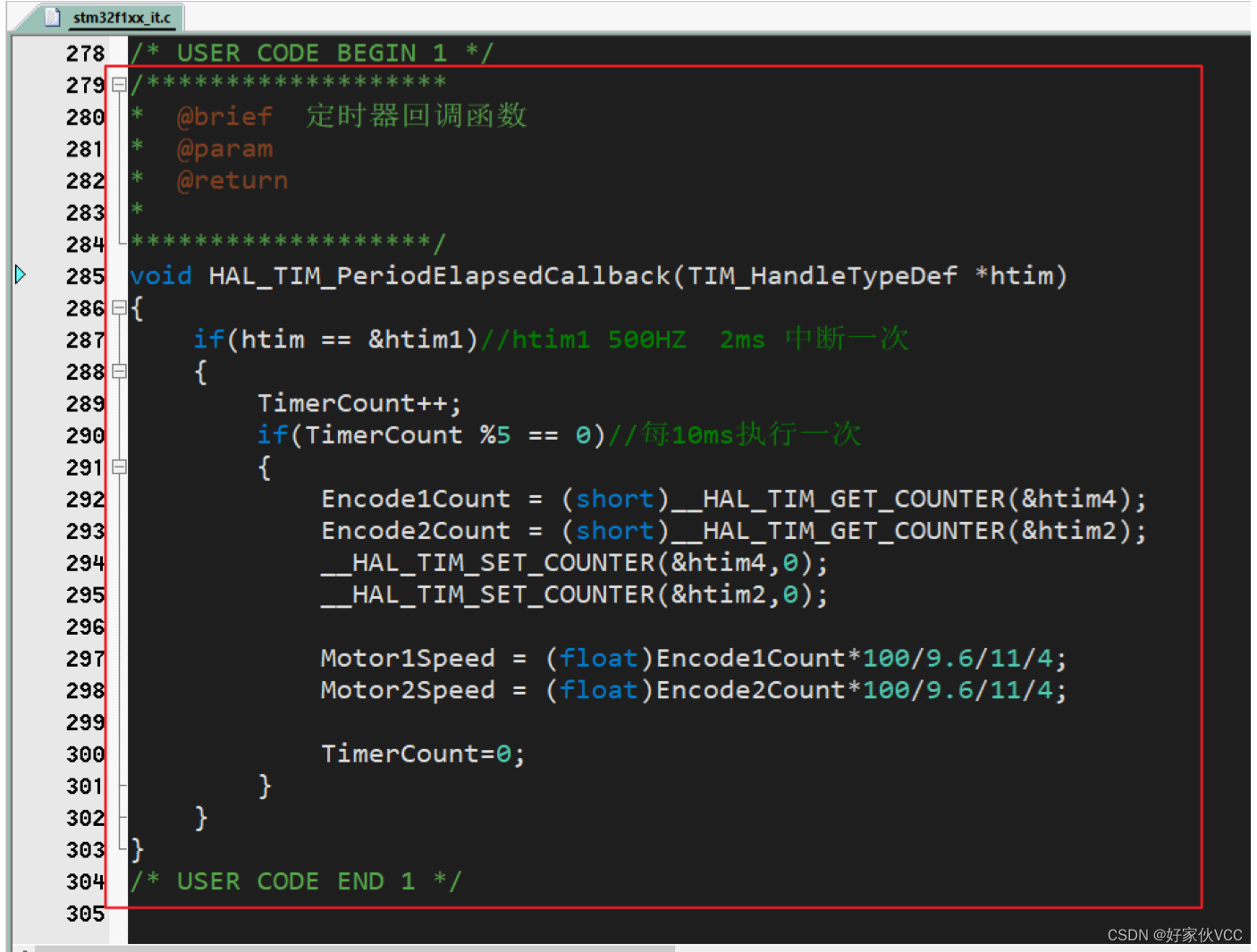
定时器回调函数中添加 速度计算内容
/*******************
* @brief 定时器回调函数
* @param
* @return
*
*******************/
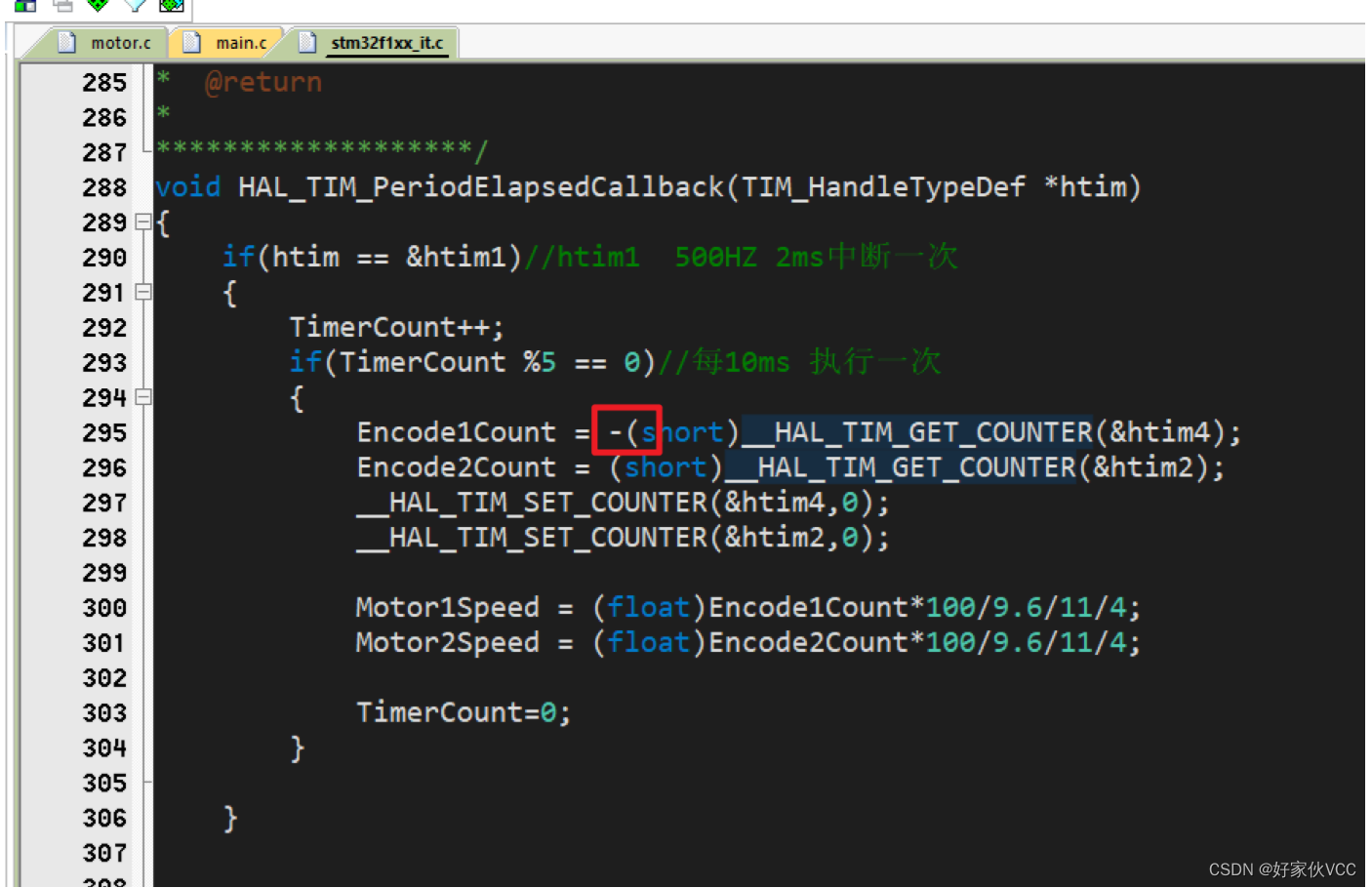
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim == &htim1)//htim1 500HZ 2ms 中断一次
{
TimerCount++;
if(TimerCount %5 == 0)//每10ms执行一次
{
Encode1Count = (short)__HAL_TIM_GET_COUNTER(&htim4);
Encode2Count = (short)__HAL_TIM_GET_COUNTER(&htim2);
__HAL_TIM_SET_COUNTER(&htim4,0);
__HAL_TIM_SET_COUNTER(&htim2,0);
Motor1Speed = (float)Encode1Count*100/9.6/11/4;
Motor2Speed = (float)Encode2Count*100/9.6/11/4;
TimerCount=0;
}
}
}
把之前的变量定义放这里
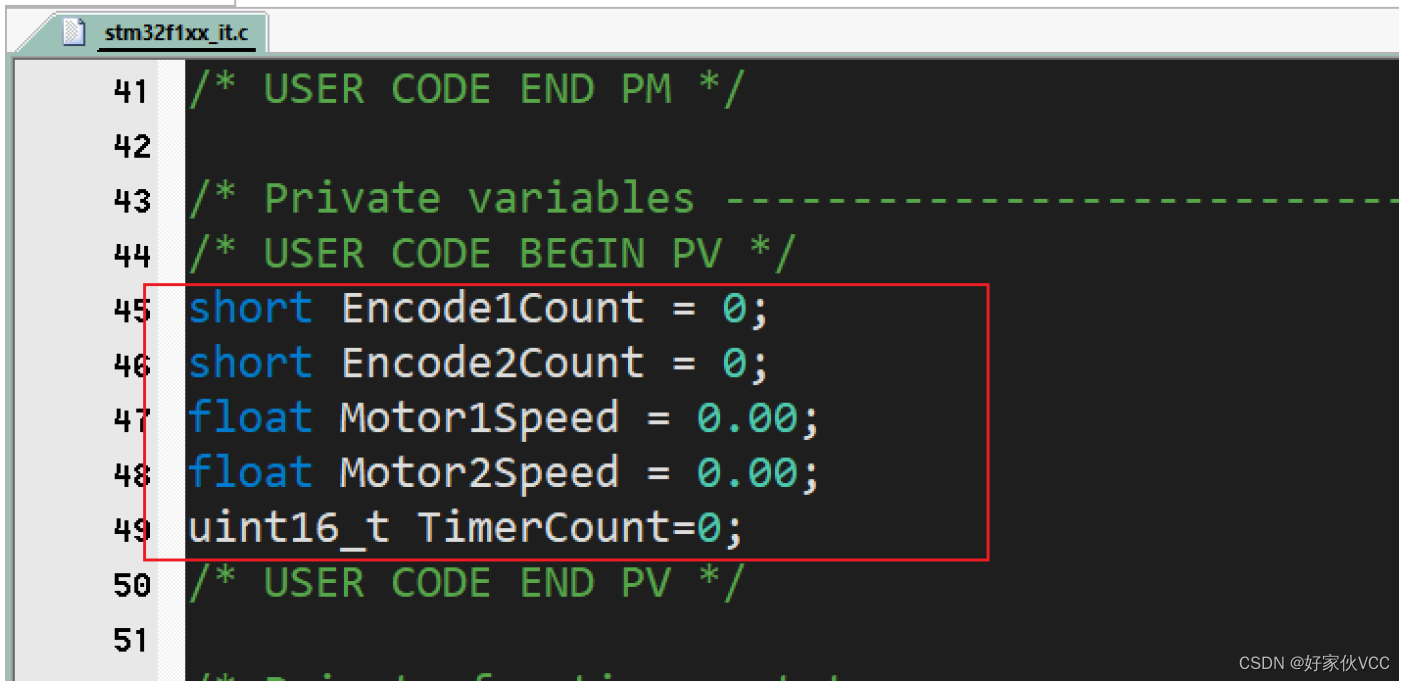
short Encode1Count = 0;
short Encode2Count = 0;
float Motor1Speed = 0.00;
float Motor2Speed = 0.00;
uint16_t TimerCount=0;
主函数就输出速度大小就可以了
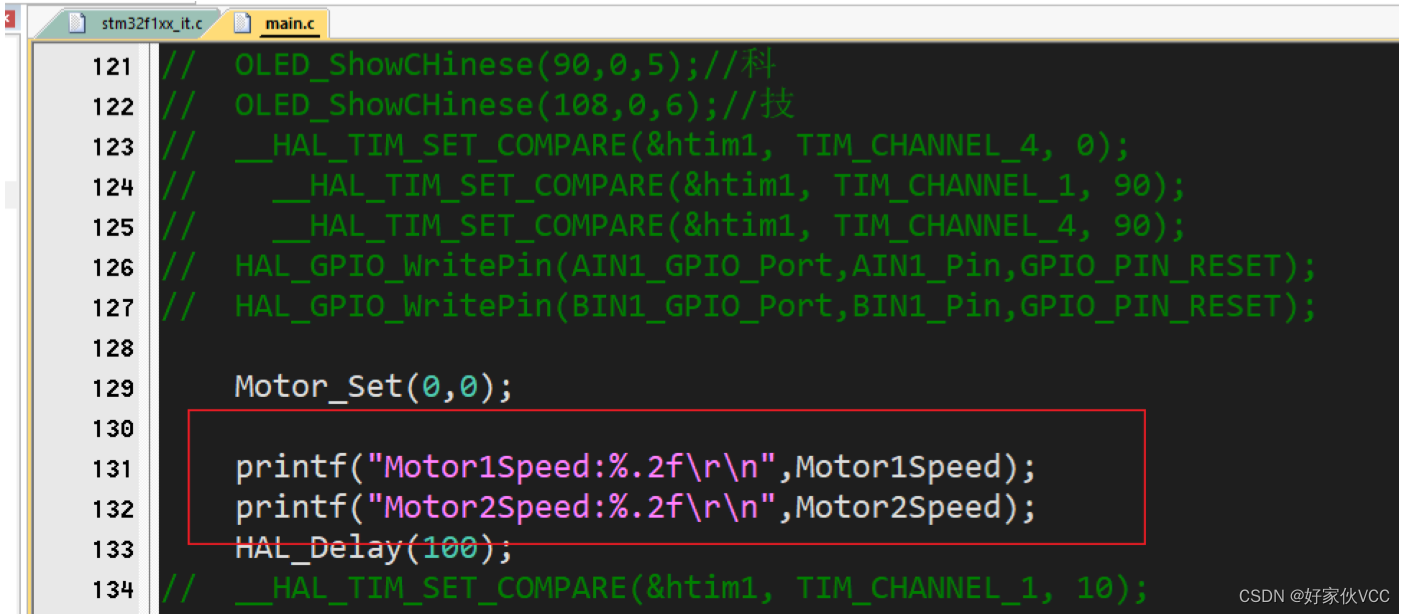
printf("Motor1Speed:%.2f\r\n",Motor1Speed);
printf("Motor2Speed:%.2f\r\n",Motor2Speed);
把变量需要声明一下
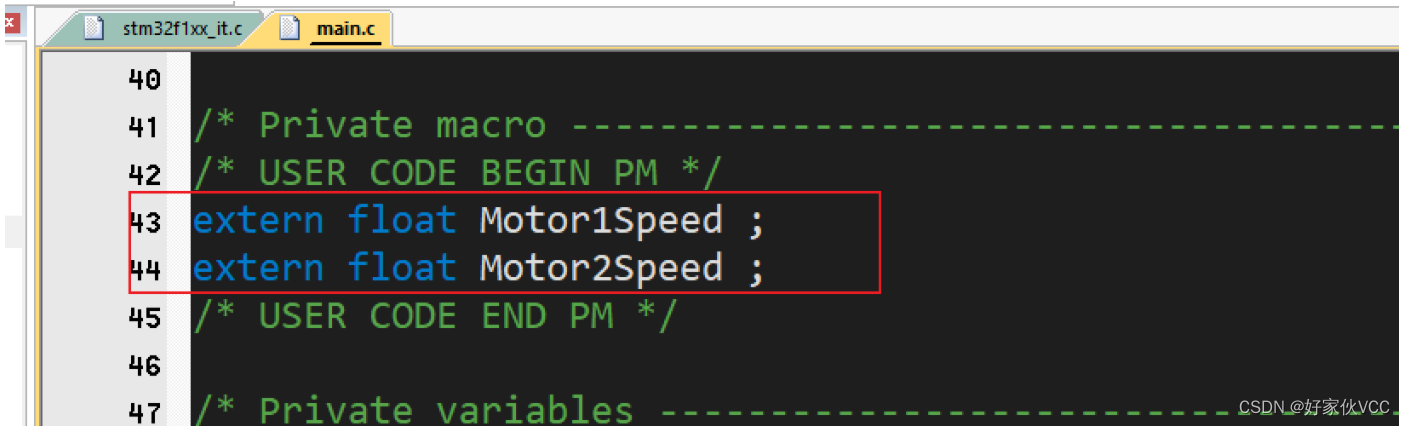
extern float Motor1Speed ;
extern float Motor2Speed ;
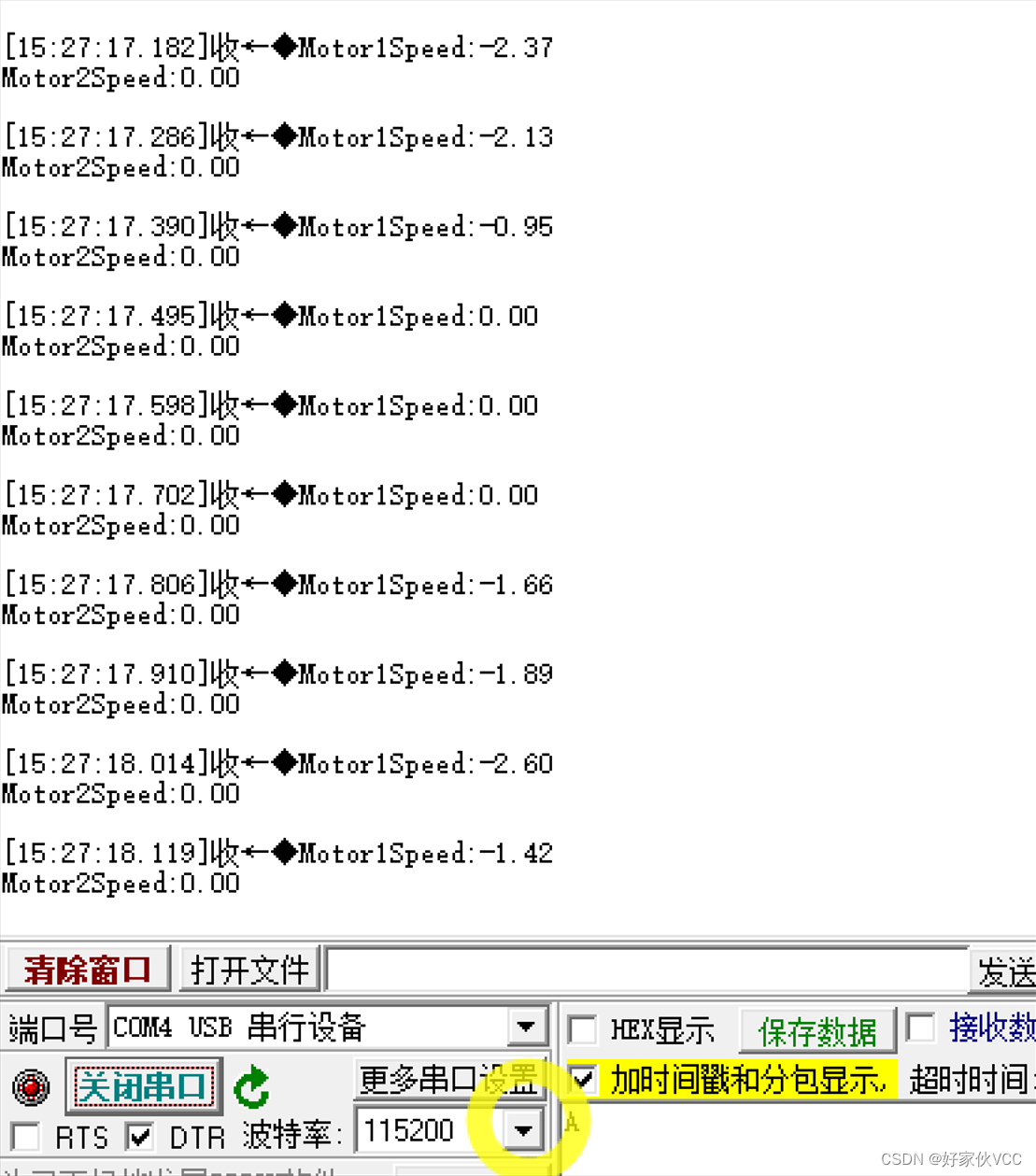
然后打开串口助手
注:
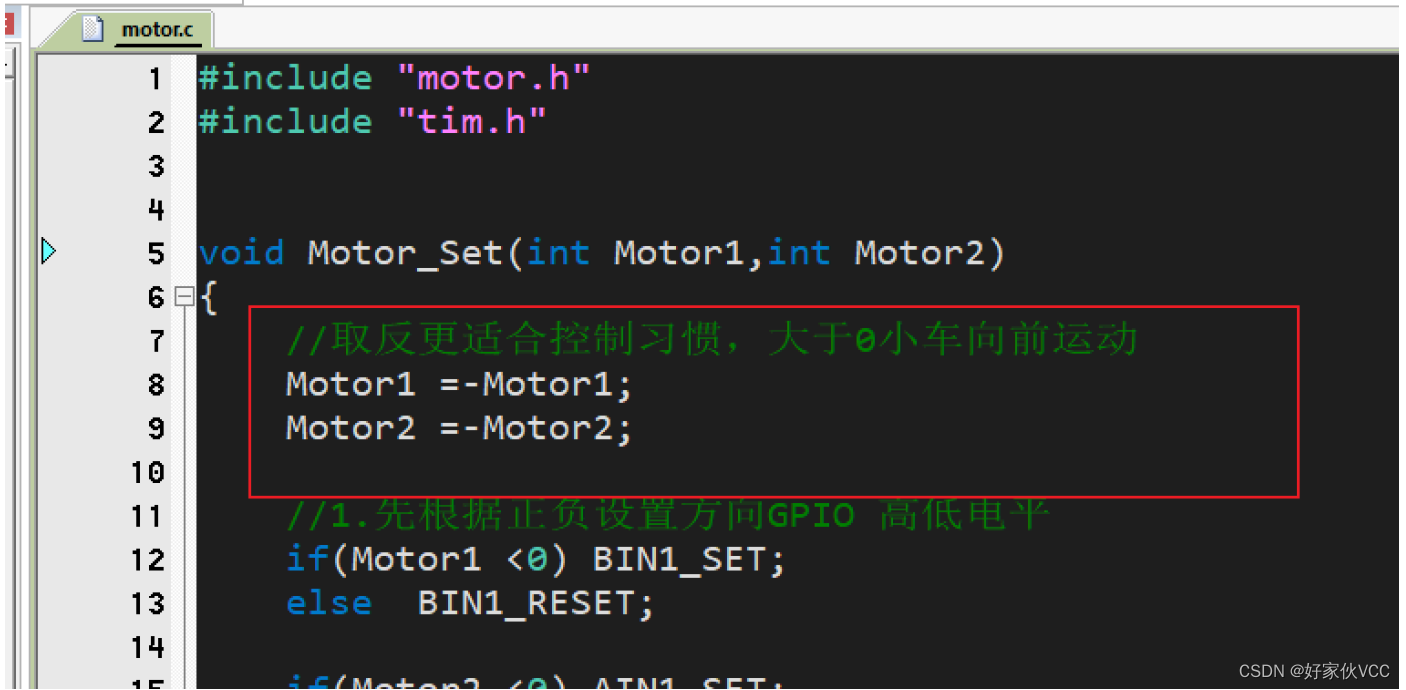
根据电机和实际小车调整速度测量与占空比设置函数
我们第七章这样就完成了 ,把程序烧录电机就可以完成测速了。
下篇第八章我们讲解 PID速度控制
1. 小车开源笔记资料:
我用夸克网盘分享了「V3小车笔记网盘」,点击链接即可保存。打开「夸克APP」,无需下载在线播放视频,畅享原画5倍速,支持电视投屏。
链接:https://pan.quark.cn/s/959b889e058b
2.小车实物或者更多最新资料:
https://item.taobao.com/item.htm?id=811175824266&pisk=frNHu_4FKJkIvsTuuCcCEX7mzo69AHGSPud-2bnPQco69uhKwVlZk4dE8DRe7R4bqDQ5dXeiqlriYBF-9zrgok2pv6ipru4SXud8J726Zra79wGRRXaINbSADshuRyG7W7pYYWxa74awT0JeiYyTPbSAD_bhCncja8hTullQsYb2pHeVxW6nemxKmuePZQnZ0yoUJyFwHvJQ-cDxh5u3M0UFPQRzs2D3we3f5wHLUrMb9SCk1XU0Qfu34sSE_rygkvVhmBnSE5q3EkQJFV2uzSGI6U5U7Xmn35FFVTmZ_yHzZvjVQlHoxRPEIURz7fiKe8qhxpiUplDj7A8lGVExbyNUIata8onnTVkOgZ4ZURFIhWIwtjybJXezb1A30gJ2QKPbmQgNy5JWFvusSm3U67YDehXMzNbM3-ME525ASNvWFvusSmQGSK7sLVgFM&spm=a21xtw.29178619.product_shelf.3.6043fc79LdVbgq
3.小车最新视频:
https://www.bilibili.com/video/BV16x4y1M7EN/?spm_id_from=333.337.search-card.all.click


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











